XiaoMi-AI文件搜索系统
World File Search SystemRigid
![arxiv:2101.03171v1 [cs.ro] 2021年1月10日](/simg/f\faede20fdb4dc69e086d3de89c6175867cb123a8.webp)
arxiv:2101.03171v1 [cs.ro] 2021年1月10日
传统上,用刚性材料制造的机器人已被广泛用于制造。然而,缺乏灵活性和能量吸收会导致机器和人之间的相互作用非常危险。相比之下,变形,适应性,灵敏度和敏捷性使软机器人能够更好地弥合此间隙。与可以描述为6度离散自由度的刚性机器人(3个关于X,Y,Z轴的3个旋转和3次翻译),软机器人的固有变形是连续的,复杂的且符合的,这被认为是自由度的非限定度[Tolley(Tolley(2015)]。因此,很难通过直接通过反向和反向运动学来控制软材料制造的机器人的运动。因此,量化和复制软材料的行为成为主要挑战之一。随着现代技术的开发,例如Microscale 3D打印,可以通过:
IMCD 先进材料 | 产品组合
特殊医用级脂肪族和芳香族热塑性聚氨酯,可通过溶解或挤出和注塑成型进行加工。它们是留置导管的首选材料,因为它们在体内变软,为患者提供极佳的舒适度。Thermedics 系列从非常柔软到坚硬,还有放射线系列

可编程机器人“转印和喷射”打印,适用于大型...
摘要 大型 3D 曲面电子产品是微电子行业的一种趋势,因为它们具有与复杂表面共存的独特能力,同时保留了 2D 平面集成电路技术的电子功能。然而,这些曲面电子产品对制造工艺提出了巨大挑战。在这里,我们提出了一种可重构、无掩模、保形制造策略,采用类似机器人的系统,称为机器人化“转移和喷射”打印,以在复杂表面上组装各种电子设备。这种新方法是一项突破性的进步,具有在复杂表面上集成刚性芯片、柔性电子产品和保形电路的独特能力。至关重要的是,包括转移印刷、喷墨打印和等离子处理在内的每个过程都是无掩模、数字化和可编程的。机器人化技术,包括测量、表面重建和定位以及路径编程,突破了 2D 平面微加工在几何形状和尺寸方面的根本限制。转移打印首先用激光从供体基板上剥离刚性芯片或柔性电子元件,然后通过灵巧的机器人手掌将其转移到曲面上。然后,机器人电流体动力打印直接在曲面上书写亚微米结构。它们的排列组合实现了多功能保形微加工。最后,利用机器人混合打印成功地在球形表面上制造了保形加热器和天线,在有翼模型上制造了柔性智能传感皮肤,其中组装了曲面电路、柔性电容和压电传感器阵列以及刚性数模转换芯片。机器人混合打印是一种创新的打印技术,可实现 3D 曲面电子产品的增材、非接触和数字化微加工。

学习报告,ENSC 231-2012 年秋季,S. Sangha
到目前为止,机器人领域一直被机械刚性结构所主导。但随着机器人的功能开始更接近人类,开发新型机器人势在必行。软机器人就是这样一种可能,它指的是由柔软、柔顺的材料制成且没有刚性骨架的机器人。其应用范围包括生物医学机器人、实地研究机器人、仿生学到智能假肢。软机器人主要由三种组件组成,即机器人主体、柔性执行器和可伸缩电子设备。可伸缩电子电路进一步由晶体管、导线等组成。因此,实现完全可伸缩电路需要可伸缩组件。但在所有这些组件中,导体是对整个电路可伸缩性产生主要影响的组件。在本报告中,我将介绍用于制造柔性、可伸缩导体的候选材料和工艺,以应用于软机器人领域的可伸缩电子设备。
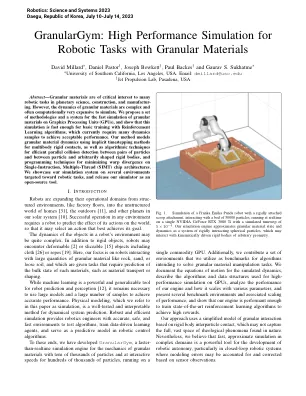
粒度:使用粒状材料进行机器人任务的高性能模拟
摘要 - 植物材料对行星科学,建筑和制造业中许多机器人任务的关键兴趣。但是,颗粒材料的动力学很复杂,并且通常在计算上非常昂贵。我们提出了一组方法和一个用于快速模拟图形处理单元(GPU)的颗粒材料的系统,并表明该模拟足够快,可以通过增强学习算法进行基础培训,目前需要许多动力学样本才能实现可接受的性能。我们的方法模型使用隐式时间播放方法进行多体刚性接触的颗粒材料动力学,以及算法技术,用于在粒子对和任意形成的刚体之间和任意形状的刚体之间的有效并行碰撞检测,以及用于最小化Warp Divergence的编程技术,以最大程度地构建单层构造(构建多项)。我们在针对机器人任务的几个环境上展示了我们的仿真系统,并将模拟器作为开源工具发布。


超声波加工 (USM)
• 磨料颗粒为球形 • 磨料颗粒刚性且坚硬 • 所有磨料颗粒都类似 • 所有冲击都相同 • 忽略由于空化和化学侵蚀而导致的材料去除 • 每次冲击去除的材料为半球形 • MRR 与磨料颗粒的频率和数量成正比

您的先进材料合作伙伴...
Hera Technologies, LLC 是一家 AS-9100 注册的航空航天制造公司,专门从事按图制造和基于模型的 CNC 加工、制造、装配、加工和配套。我们利用各种工程非金属材料和金属来根据客户的严格规格生产飞行硬件、工具和地面支持设备。

牵引和农业拖拉机轮胎选择研究。
文献综述 ................................................................................................ 6 轮胎和牵引术语' .............................................................................................. 6 轮胎定义 .............................................................................................................. 6 轮胎名称 .............................................................................................................. 9 车轮力学和牵引术语 ...................................................................... 12 拖拉机力学 ............................................................................................. 17 力分析 ...................................................................................................... 19 功率分析 ...................................................................................................... 24 其他性能标准 ............................................................................................. 30 轮胎机械特性 ............................................................................................. 33 刚性表面上的滚动半径 ............................................................................. 33 Charles 和 Schuring 滚动半径模型 ............................................................. 33 Clark 滚动半径模型 ............................................................................. 36 Brixius 和 Wismer 滚动半径 Alodel ............................................................. 36 刚性表面上的静态挠度、刚度和接触面积。.。。37 动态刚度和阻尼研究 ................................................................................ 44 充气压力的影响 .............................................................................................. 55 牵引力和功率测量 .............................................................................................. 60 实验程序 ...................................................................................................... 61 测试轨道测量 ................................................................................................ 64 现场和土箱测量 ............................................................................................. 65 室内测量 ...................................................................................................... 70 牵引力预测 ...................................................................................................... 74 Freitag 的初步工作 ...................................................................................... 74 混凝土上的牵引力 ............................................................................................. 78 现场牵引力 ...................................................................................................... 81 Zoz 牵引力预测图表 ................................................................................ 81 Wismer 和 Luth 牵引力模型 ........................................................................ 81