XiaoMi-AI文件搜索系统
World File Search SystemRobosub
RoboSub 2025
目标:为学生提供机会体验系统工程的挑战,以自动驾驶汽车来完成现实任务的技能,以及建立年轻工程师与开发和生产自动驾驶汽车技术的组织之间的关系。目的是培养将来会推动信封的人。

RoboSub 2024技术设计报告
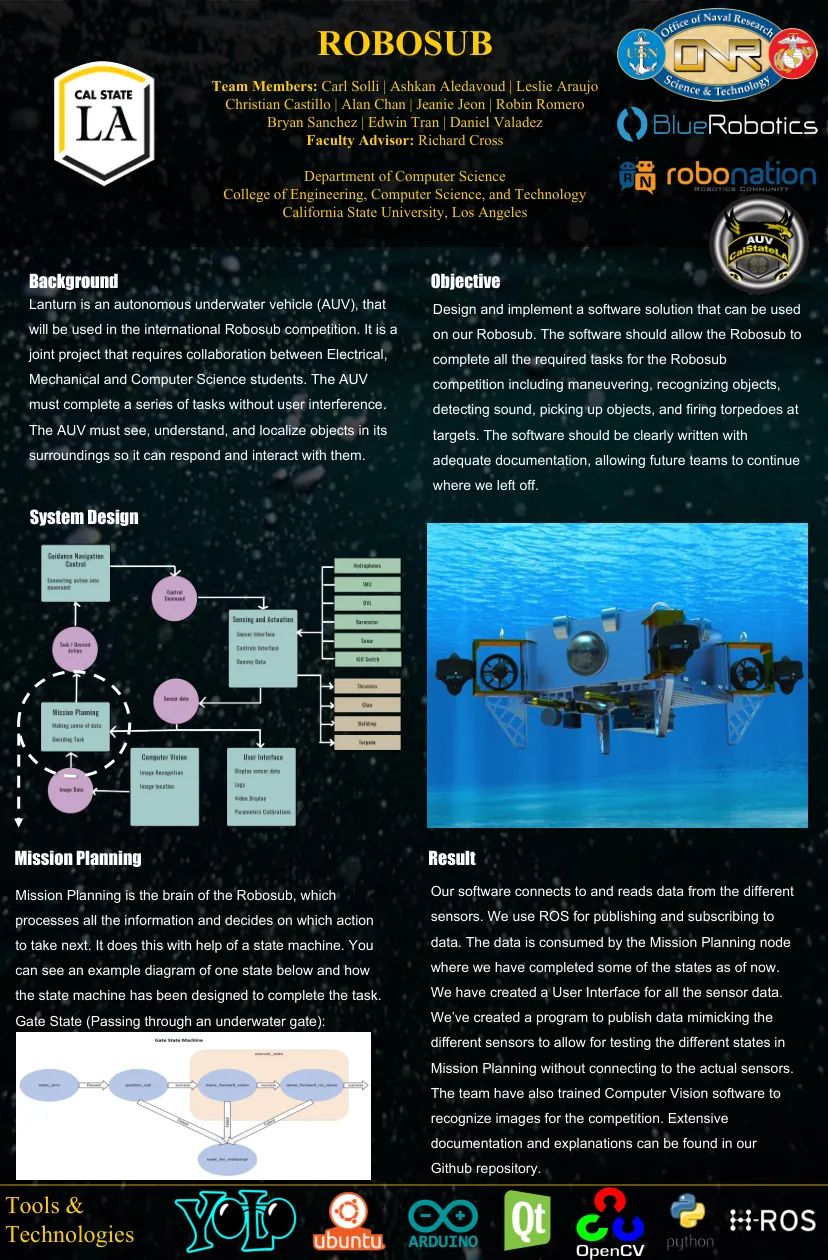
由于这是Bur的介绍季节,因此我们的AUV优先考虑该课程的更简单任务:输入太平洋(门)和映射(鱼雷)。门任务是最高优先级,因为类似的任务用于预先合格。使用我们的车载视觉系统来识别门,然后Amibition将接近门并通过。利用PID控制器,我们的AUV可以锁定其偏航位置,以确保其在同一标题上通过。优先任务是鱼雷任务。利用我们的传感器系统,我们将能够使用我们的向下和面向前置摄像机导航到鱼雷任务。使用我们的立体声摄像机,我们将能够感知目标的深度,从而使我们能够使用板载气动系统将弹丸与目标对齐并向其射击。

RoboSub 2024技术设计报告
摘要 - 今年,由中学和高中学生组成的团队Inspion的新团队正在建立未来几年的STEM管道。凭借更少的机器人经验,该团队利用过去的课程和能力,并将部署更有能力的自动驾驶水下汽车(AUV)Onyx来执行任务,而较小的AUVGræy,Græy,正在用作测试台,并且有推动者可以展示Intersub交流。团队集成了一个新的光纤陀螺仪(FOG)和多普勒速度日志(DVL)算法,该算法与水力机,摄像头和一个机上惯性测量单元(IMU)相结合,可实现更准确的导航。团队继续改善软件,并结合了更强大的本地化算法。团队的开源Robosub 101指南[1]已更新以加速和文档学习作为全球新RoboSub参与者的参考文献文档。

RoboSub 2024技术设计报告
在过去的一年中,塔塔纳夫(Tartanauv)重新评估了我们的团队战略和工程方法,以更好地与我们的基于教育和竞争的目标保持一致。过去,我们的年轻好奇和渴望的工程师团队对新系统的探索性开发进行了重视,具有巨大的潜力,可以超越久经考验的解决方案,以解决RoboSub竞争所带来的问题。tartanauv在Robosub 2023上派出了两辆车:我们的主要海底,配备了完整的传感器和驱动套件,为我们提供了对2022年许多竞争任务的全面解决方案,而Albatross(Albatross)(我们的处女座的海底均可集中于更简单的视觉任务,而依赖派出者的范围,以减少王友的范围。我们对这种合作,两辆车进行机器人竞争的愿景本质上是新颖的,并且作为我们的

康奈尔大学自动水下车辆
摘要 - Sirius和Polaris是代表康奈尔大学参加AUVSI Robosub 2024比赛的两辆自动驾驶汽车。在过去的一年中,Cuauv成员有无数小时的时间来构建我们的新2024 AUV Sirius。Sirius的上船体压力容器经过精心设计,以增加可及性并减少错误空间,并具有新的矩形轮廓。我们已经设计并集成了电池管理系统,以防止电流过度并最大程度地降低板损坏的风险。此外,我们的新基于伺服的致动系统承诺在完成任务时更可靠。这些进步的目的是建立一个可靠和精确的系统。今年的一个重要战略重点是在两辆车之间的机械和电气系统中都向后兼容。这支持我们整个系统的可靠性。

Matsya 6d的技术设计报告,自动水下车辆
摘要 - 对于RoboSub 2024,AUV-IITB团队正在采取行动Mastya 6d,具有新的驱动系统,可靠的电气堆栈和全新的代码库。考虑到要采摘的物体的多功能性,设计了一种使用软机器人技术的抓手。鱼雷射击器变得更简单,更容易重新加载。现有的Subconn连接器被我们的内部连接器代替,以便在测试和提高速度时易于使用。使功能板变小,并合并了高度的冗余,以确保运行平稳。更改了摄像头,以提供更广阔的视野,更明亮的进料和高数据传输速率。最重要的是,整个软件体系结构都经过改进以使用Python而不是C ++,从而利用其广泛的图书馆支持和提高可读性。最后,在车辆上进行了广泛而严格的测试,以确保所有功能都经过了良好的测试和能力。
Team Inspration 2025 Roboboat的设计...
摘要 - 团队灵感从Roboboat 2024,Robosub 2024和Robotx 2024中汲取了教训,将我们的自主地面车辆(ASV),Barco Polo升级为2.0版。我们通过显着改善了我们的软件并安装新的壁球发射器和水枪,提高了Barco Polo的性能和可靠性,从而使尝试所有任务的能力。团队计划通过融合不同的全球导航卫星系统(GNSS)和一个具有深度感知的立体摄像头来完成使用同时本地化和映射(SLAM)的所有任务。我们还组织了电气系统,以解决测试期间观察到的电气连接的不稳定性。有条不紊的测试策略,包括单位测试,测试计划和状态会议,简化了开发过程,使远程成员能够与当地队友有效合作。设计审查,连续集成以及通过系统工程和敏捷过程的迭代反馈使团队能够快速失败并及时改善子系统。