XiaoMi-AI文件搜索系统
World File Search SystemRobot

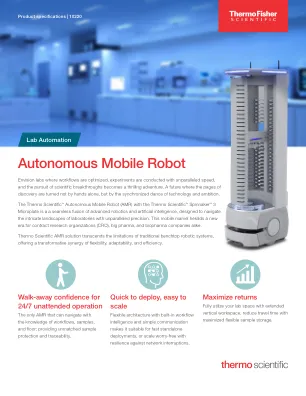
Moiré材料 自动移动机器人Moiré材料自动移动机器人
通用实验室设备 - 不用于诊断程序。©2024 Thermo Fisher Scientific Inc.保留所有权利。除非另有说明,否则所有商标都是Thermo Fisher Scientific及其子公司的财产。此信息作为Thermo Fisher Scientific Products的功能的一个例子。无意以任何可能侵犯他人知识产权的方式来鼓励使用这些产品。规格,条款和定价可能会发生变化。并非所有产品都在所有国家 /地区提供。请咨询您的当地销售代表以获取详细信息。PS10220-EN 0224M
机器人伴侣,行业的智能互动机器人同事5.0
摘要 - 为了克服所谓的行业4.0的局限性,重点是大规模生产和充分的自动化,最近引入了一种新颖的范式,即行业5.0,旨在增加人类和机器之间的合作,尤其是机器人,而不是将前者替换为后者。这个挑战需要新颖的互动智能机器人能够轻松有效地执行复杂的任务,并在需要时与人类合作,无论是进行培训还是工作。在这项工作中,引入了机器人同伴,这是该范式的新颖示威者。它结合了机器人技术,人工智能,软件工程和嵌入式系统技术,并针对工业组装任务。首先测试表明,该机器人可以自主地或与人类操作员合作有效地组装代表性齿轮系统。

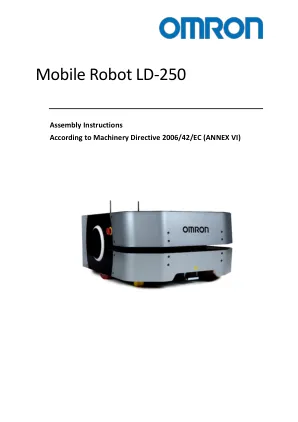
移动机器人 LD-250
c) 买方补救措施。欧姆龙在本协议项下的唯一义务是,根据欧姆龙的选择,(i)更换(以最初向买方发货的形式,买方负责拆卸或更换的人工费用)不合格产品,(ii)修理不合格产品,或(iii)向买方偿还或贷记相当于不合格产品购买价格的金额;但欧姆龙在任何情况下均不负责与产品有关的保修、修理、赔偿或任何其他索赔或费用,除非欧姆龙的分析证实产品得到妥善处理、储存、安装和维护,并且没有受到污染、滥用、误用或不当修改。买方退回任何产品必须在发货前得到欧姆龙的书面批准。欧姆龙公司对产品与任何电气或电子元件、电路、系统组件或任何其他材料或物质或环境结合使用所产生的适用性或不适用性或结果不承担任何责任。任何口头或书面提供的建议、推荐或信息均不得解释为对
情绪检测机器人
1 B.E - 机器人技术和自动化,1 Sri Ramakrishna工程学院,印度哥印拜陀。摘要:本文“基于AI的Portable Companion Bot”项目介绍了一种新的解决方案,旨在利用人工智能(AI)创建一种多功能且智能的伴侣设备。此便携式机器人旨在在各种情况下为用户提供个性化的帮助和陪伴,从工作空间环境到室内活动。通过利用AI技术和机器学习,该机器人具有理解和响应用户查询,执行任务并适应个人偏好的能力。该项目的目标是开发一个紧凑且用户友好的伴侣机器人,该机器人无缝地集成到用户的日常生活中,为他们提供宝贵的支持和陪伴。我们的目标是创建一个计算机伴侣,可以帮助您完成任务,调整其行为以匹配您的情绪,甚至与您一起进行活动。这就像在您的设备上有一个有益的朋友!此外,我们的系统可以与您使用的其他应用程序连接,并建议您照顾好自己的方法,尤其是当您感到沮丧时。我们还确保在使用我们的系统时保护您的隐私。基于AI的便携式伴侣机器人的潜在应用涵盖了各个领域,包括个人帮助,娱乐,医疗保健和教育。通过这个项目,我们旨在展示AI驱动的伴侣设备在增强用户在不同环境中的福祉,生产力和生活质量方面的变革潜力。索引术语 - 情感检测,伴侣。

机器人控制原理1
本课程的开发是为了帮助您了解从每种工业革命过渡的特征的不同特征和进步。研究工业革命为理解技术和自动化的发展提供了历史背景,为欣赏机器人技术在现代行业的发展和意义奠定了基础。机器人在各种21世纪的环境中变得越来越普遍,从而有助于经济和社会利益。然而,在公认的标准和伦理学的背景下(称为RoboEthics(机器人伦理))考虑这些好处至关重要。此内容将概述在不同环境中使用机器人的一些基本经济和社会利益,同时还强调维护道德标准和包容性的重要性。通过解决这些重点领域,学习者将了解在21世纪环境中使用机器人的经济和社会利益,同时注意机器人中公认的标准和道德规范。本课程的本部分旨在帮助您获取逻辑和循环图的知识,并在控制系统设计中使用它们的技能。本课程将向您介绍机器人,就像我们一样,思考和采取行动以完成他们的任务。您将探讨机器人系统的原理,重点关注逻辑和控制循环的应用,以及它们在设计机器人控制系统中的重要性。

