XiaoMi-AI文件搜索系统
World File Search SystemRobotic

泌尿外科机器人手术的未来
实际上,可以在许多不同的环境中利用3DVM,例如患者咨询,外科手术计划和手术培训,在二维(2D)平面屏幕或三维(3D)虚拟环境中通过使用头部安装的显示器(MR)表现(MR)或虚拟现实(MR)设置(VR)设置图像。9后者允许在现实(MR)或完全虚拟环境(VR)中实现3D体验,代表了元概念的起源,为此,仍然缺乏明确的定义。通常,它通常是指虚构的虚拟世界与真实世界之间的完全不同的本地虚拟世界或结合。因此,可以说元元可以代表“增强”世界(即MR)或相反,是一个完全不同的虚拟世界。10因此,元元允许建立基础结构的机会,而其他平台(例如艺术智能(AI)和区块链)可以通过该平台来改善不同的医疗结果。

机器人臂和武器末端工具
具有挑战性。这里的建议是寻找一个预先集成和预验证的ROS2捆绑包,其中还包含有用的软件包,例如MoveIt进行运动计划。Advantech建议选择主机控制器,这些主机控制器支持CODESYS,以减少开发工作。无论选择哪种操作系统(即Linux,Ubuntu或Windows),这可以实时控制机器人武器。对于将来的服务机器人应用程序,需要将AI(人工智能)例程集成到运动控制软件之上。ABB机器人部总裁Marc Segura表示,AI正在增强机器人的抓地力,选择和地点的能力。对于服务机器人来说也是如此。Advantech为工业机器人提供支持Canopen和CIA 402的ROS2软件套件,也可以用于服务机器人。

机器人teleperation的伪热接口
机器人远程操作涉及远程驾驶和操纵机器人系统,这特别适用于敌对的环境。但是,情况意识(SA)构成了远程植物学的主要挑战[9]。操纵物体时,人类会感知触觉。触觉反馈在人们与远程环境互动(例如,在机器人的远程流动中)互动或在虚拟环境中提供更多沉浸式体验时,一直发挥着重要作用,而人类没有可能在本地触摸的可能性。通过使用多模式反馈(主要是视觉)和探索大脑的能力和局限性,可以将伪助记术视为每一个CE的一种触觉幻觉[11]。通过介绍映射到用户动作的伪热技术技术(PHT)的微妙细微差别,允许模拟虚拟触觉和牙龈感觉,而无需将触觉设备附加或应用于身体而引起。通过多模态模拟的感觉效率感知到这些这些,例如通过视觉和听觉效率或体现的隐喻。近年来,伪热疗文献发表的研究工作的数量不大,模拟了更多的技术和新的应用领域,主要集中于扩展现实和空中互动[16]。作者考虑进一步探索这些PHT,特别是组合多模式的技术,以改善机器人远程操作,在远程车辆驾驶,对象操纵,SA和协作任务中。据最佳作者所知,在很大程度上尚未探索PHT进行机器人远程操作,但[13]例外[13]呈现合规性并协助手术远程操作任务。


机器人扩散变压器的成分
摘要 - 近年来,机器人主义者通过利用高容量变压器网络体系结构和生成扩散模型来解决灵巧机器人硬件的越来越一般任务取得了良好的进步。毫无意义地结合了这两个正交改进已被证明是非常困难的,因为没有明确且鲜明的理解过程来做出重要的设计选择。在本文中,我们确定,研究和改进了高容量扩散变压器策略的关键架构设计决策。所得模型可以在多个机器人实施方案上有效地解决各种任务,而不会导致主参数调整的痛苦。通过将调查的结果与改进的模型组件结合起来,我们能够提出一种新颖的体系结构,称为DIT-Block策略,该策略极大地超过了解决长期马(1500多个时间步长)与人类的Aloha Aloha Aloha Robot上的Dexteros Dists。此外,我们发现在10小时的高度多模式,语言注释的Aloha演示数据中接受培训时,我们的政策显示出改善的缩放性能。我们希望这项工作将为未来的机器人学习技术打开大门,以利用大型变压器体系结构的可扩展性来利用生成扩散建模的效率。代码,机器人数据集和视频可在以下网址找到:https://dit-policy.github.io

订单选择机器人自动化
采摘和包装交付平均需要四到八个小时的履行操作。一流的零售商在短短两个小时内就这样做。那些时间范围之间的区别是惊人的。更重要的是,当您考虑到交货时间太长时,几乎一半的消费者将在其他地方购物。作为速度方程式的关键因素,采摘改进可以帮助零售商从平均表现到最高的表现。通过将自动化和编排结合起来,公司将目前的采摘实践转变为有效的流程,以实现更高的速度和准确性。收益在提高整体仓库运营效率方面也很突出,包括订单履行,库存管理和许多行政任务。
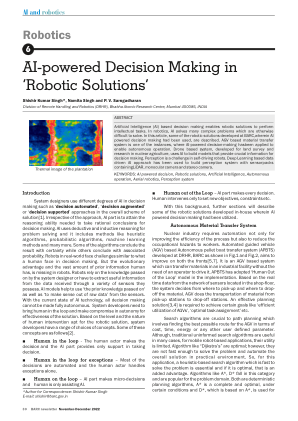
“机器人解决方案”中的人工智能决策
系统设计师在决策过程中使用不同程度的人工智能,例如在整体解决方案中使用“决策自动化”、“决策增强”或“决策支持”方法[1]。无论采用哪种方法,人工智能部分都是要获得做出决策合理结论所需的推理能力。人工智能使用演绎和归纳推理来解决问题,它包括启发式算法、概率算法、机器学习方法等。一些算法得出确定的结果,而另一些算法则得出相关的概率。现实世界中的机器人面临着与人类在决策过程中面临的挑战类似的挑战。但机器人缺乏人类的进化优势和大量的先验信息。机器人依靠系统设计师传递的知识,或者必须从通过它们拥有的各种传感器接收到的数据中提取有用的信息。人工智能模型有助于利用“传递的先验知识”以及“从传感器中理解原始数据”。在目前的人工智能技术水平下,所有决策都无法完全自主。系统开发人员需要将人类纳入其中,并在自主性方面做出妥协,以提高解决方案的有效性。根据适合机器人解决方案的人为干预水平和性质,系统开发人员有一系列概念选择。其中一些概念如下[2]。
许可标准机器人和人工智能...
内部控制手册草案应包括但不限于以下内容: 公司治理安排; 内部控制机制,如健全的行政和会计程序; 信息技术和网络安全管理; 为解决任何利益冲突而采取的措施; 打击洗钱和资助恐怖主义的措施; 制定对其官员具有约束力的行为准则和道德规范,涉及

机械臂可以由大脑控制吗?
我们将四个微电极阵列放入志愿者的大脑中。微电极阵列包含记录和产生神经信号的传感器。神经信号是身体使用的信息。它们与大脑之间传递信息。我们在控制手和手臂运动的大脑部分放置了两个阵列。这些阵列发送神经信号来控制机械臂。我们在接收来自手的信息的大脑区域放置了另外两个阵列。这些传感阵列发出神经信号。它们让我们的志愿者知道机械手何时接触到物体。
SRS 235-F 设施的机器人技术
本报告是作为美国政府机构赞助的工作的说明而编写的。美国政府及其任何机构、其任何雇员、其任何承包商、分包商或其雇员均不对所披露的任何信息、设备、产品或流程的准确性、完整性或实用性作任何明示或暗示的保证,或承担任何法律责任或义务,也不表示其使用不会侵犯私有权利。本文以商品名、商标、制造商或其他方式提及任何特定商业产品、流程或服务并不一定构成或暗示美国政府或任何其他机构对其的认可、推荐或支持。本文表达的作者的观点和意见不一定代表或反映美国政府或其任何机构的观点和意见。