XiaoMi-AI文件搜索系统
World File Search SystemRohit

Rohit Mallick
罗希特·马利克(Rohit Mallick)是博士学位。克莱姆森大学计算机学校内以人为本计算学位的候选人。自2020年秋季开始学位以来,罗希特(Rohit)在Nathan J. McNeese博士的建议下一直被聘为研究生研究助理,并且是计算环境(Trace)研究小组中团队研究分析的正式成员。在这四年半的时间里,罗希特(Rohit)曾从美国陆军联合能力发展司令部(CCDC),海军研究(ONR),国家科学基金会(NSF)和空军OFFI CE的资助拨款(CCDC)撰写,其价值总计价值1,1784,5551.20美元。罗希特(Rohit)利用这些赠款为人为因素,人类计算机互动(HCI),人类ai团队(HAT)和计算机支持的协作工作(CSCW)做出了明显的贡献。迄今为止,罗希特(Rohit)撰写了五篇期刊文章,十篇会议论文,一项技术,七个会议演讲以及13篇研究海报,作为定性和定量方法的混合方法研究者。与他的研究成就一起,他还一直在Trace中担任本科生协调员(2023年)和领导博士学位。学生(2024)指导新任学生的学术研究细微差别。通过在美国陆军研究实验室和普渡大学的计算认知神经科学实验室的以前的实习 /助手来吹嘘十多年的研究经验,Rohit积极致力于在AI技术设计方面提供各种观点,以促进其人类合作者的福祉。

授予Cannon博士 2024-2025 ISE手册
非线性研究中心博士后奖学金,洛斯阿拉莫斯国家实验室2021-2022最佳纸张奖,2015年AICHE年会2015年乔治·M·凯勒·凯勒(George M. Ramanujam纪念奖,IIT MADRAS 2011 EPFL,DAAD WISE和MITACS GLOBALINK夏季研究奖学金(选择EPFL)2011 2011年在地区数学奥林匹克运动会中,印度2004年,2006年和2008年被选为印度国家国民信息学和化学疗法(2008年最佳1%)

Rohit 的简历
之前的工作:1991 年 10 月 12 日至 2006 年 10 月 3 日在斋浦尔马拉维亚国立技术学院(前 MREC)土木工程系担任讲师,1985 年 12 月 16 日至 1991 年 10 月 12 日担任讲师。工作性质包括为本科(土木)和硕士(水资源)学生授课,博士指导。包括上课、辅导课、设计和实验课,还指导了 2 名博士生和约 32 名技术硕士。以及 45 名本科生的研讨会 / 项目 / 论文等。行政职责包括 2004-05 年本科 (学术) 委员会成员、2004 年计算机操作员职位审查委员会召集人、2003 年 5 月 20 日至 2003 年 8 月 MIS 项目协调员、负责各个实验室、时间表等,以及各个委员会的召集人/成员。
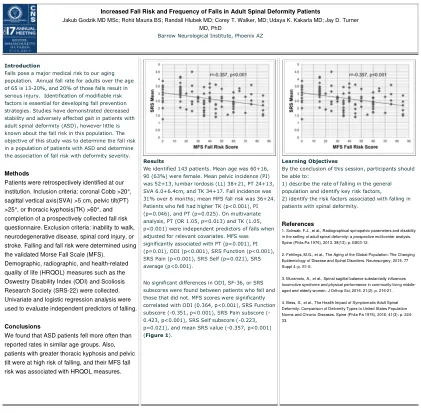
Rohit Mauria BS; Randall Hlubek MD
患者在我们机构进行了回顾性确定。纳入标准:冠状Cobb> 20°,矢状垂直轴(SVA)> 5 cm,骨盆倾斜(PT)> 25°或胸腔后脑(TK)> 60°,并完成前瞻性收集的跌倒风险问卷。排除标准:无法行走,神经退行性疾病,脊髓损伤或中风。使用经过验证的Morse秋季量表(MFS)确定跌倒风险。人口统计学,射线照相和健康相关的生活质量(HRQOL)措施,例如Oswestry残疾指数(ODI)和脊柱侧弯研究协会(SRS-22)。单变量和逻辑回归分析用于评估跌落的独立预测指标。

Rohit Sharma,Kapil Kumar Kaswan Mtech Scholar,CSE ...
U. Chatterjee等。[6]使用椭圆曲线加密方法(ECC)方法来确保物联网网络的通信。实验表明,与现有方案相比,它提供了轻巧的身份验证和关键管理过程,这些过程消耗了更少的网络资源(在妥协网络的限制下)。Q. Ma等。 [7]为智能家用设备开发了身份验证方案。 它使用设备签名来通过物联网网络的身份验证邻居的身份验证。 分析表明,中间设备可以互相验证,以确保防止锻造的安全通信。 Y. Li [8]使用ECC加密图为IoT网络开发了一种多因素身份验证方案。 它使用实体模型进行安全性,并且还根据设备签名来计算信任因素。 分析表明,与现有的身份验证方案相比,它更加安全/资源。 R. Krishnasrijaet Al。 [9]为IoT网络开发了基于多项式的身份验证过程。 它使用会话密钥进行设备身份验证。 仿真结果表明,它可以防止网络资源免受常见的安全威胁,并且其计算开销较少。 Z. Wang等。 [10]引入了针对物联网网络的轻质身份验证方案。 它将唯一ID(基于设备硬件)分配给网络中的每个设备,然后使用集中式服务器注册设备以进行安全通信。 分析表明,与现有方案相比,它消耗了较少的计算资源。Q. Ma等。[7]为智能家用设备开发了身份验证方案。它使用设备签名来通过物联网网络的身份验证邻居的身份验证。分析表明,中间设备可以互相验证,以确保防止锻造的安全通信。Y. Li [8]使用ECC加密图为IoT网络开发了一种多因素身份验证方案。它使用实体模型进行安全性,并且还根据设备签名来计算信任因素。分析表明,与现有的身份验证方案相比,它更加安全/资源。R. Krishnasrijaet Al。 [9]为IoT网络开发了基于多项式的身份验证过程。 它使用会话密钥进行设备身份验证。 仿真结果表明,它可以防止网络资源免受常见的安全威胁,并且其计算开销较少。 Z. Wang等。 [10]引入了针对物联网网络的轻质身份验证方案。 它将唯一ID(基于设备硬件)分配给网络中的每个设备,然后使用集中式服务器注册设备以进行安全通信。 分析表明,与现有方案相比,它消耗了较少的计算资源。R. Krishnasrijaet Al。[9]为IoT网络开发了基于多项式的身份验证过程。它使用会话密钥进行设备身份验证。仿真结果表明,它可以防止网络资源免受常见的安全威胁,并且其计算开销较少。Z. Wang等。[10]引入了针对物联网网络的轻质身份验证方案。它将唯一ID(基于设备硬件)分配给网络中的每个设备,然后使用集中式服务器注册设备以进行安全通信。分析表明,与现有方案相比,它消耗了较少的计算资源。A. G. Mirsaraei等。 [11]将ECC方法与区块链技术集成在一起,用于通过物联网网络的基于智能卡的身份验证。 它使用私人信任的服务器进行基于区块链的用户注册。 分析表明,它在计算开销/能耗方面表现出色。 P. Tyagi等。 [12]研究了与多因素身份验证方案有关的问题。 研究表明,由于会话密钥可能会在中间设备级别妥协,因此与中间攻击的安全性较差。 可以进一步利用分析数据来克服该方案的缺点。 Z. Siddiqui等。 [13]使用集中式服务器对IoT网络进行了基于数字证书的身份验证。 实验表明,与现有方案(ProSANTA/BIPLAB身份验证)相比,它是高效的方案。A. G. Mirsaraei等。[11]将ECC方法与区块链技术集成在一起,用于通过物联网网络的基于智能卡的身份验证。它使用私人信任的服务器进行基于区块链的用户注册。分析表明,它在计算开销/能耗方面表现出色。P. Tyagi等。[12]研究了与多因素身份验证方案有关的问题。研究表明,由于会话密钥可能会在中间设备级别妥协,因此与中间攻击的安全性较差。可以进一步利用分析数据来克服该方案的缺点。Z. Siddiqui等。[13]使用集中式服务器对IoT网络进行了基于数字证书的身份验证。实验表明,与现有方案(ProSANTA/BIPLAB身份验证)相比,它是高效的方案。

3 自由度 (DOF) 运动平台的设计和仿真 Shailendra Shisode †* 、Ganesh Shrigandhi † 、Rohit Magar、Sandeep Mistari、Renuka Patel、Abhishek Lokhande 和 Mandar M. Lele ϯ
† 机械工程系,Savitribai Phule Pune 大学,麻省理工学院工程学院,Kothrud,浦那,印度 ‡ 机械工程系,Savitribai Phule Pune 大学,VIIT,Kondhawa (Bk),浦那,印度 2017 年 3 月 12 日接受,2017 年 3 月 16 日在线提供,特刊-7(2017 年 3 月)摘要 成功开发了一种三自由度运动模拟平台,该平台能够模拟汽车在道路上行驶。该运动模拟平台的开发是为了实际模拟和测试无人驾驶道路车辆在道路上行驶的能力,然后在实际设备上进行演示。从概念设计到实际实施,运动模拟平台开发的所有方面都考虑在内。介绍了运动模拟平台的机械设计和构造,以及使该运动模拟平台运行所需的电子设备和软件。建立了过程和平台方向的数学模型。能够调节过程的控制器架构实现了对运动模拟平台的成功控制。Intelligent Motion Technology Pvt. Ltd. 的实际运动模拟结果证明了运动模拟平台的成功。运动模拟平台的成功开发很大程度上归功于对不同开发阶段的广泛研究、规划和评估。关键词:三自由度运动、运动模拟器、运动平台、倾斜传感器、无刷伺服电机。1. 简介 1 要求运动模拟平台是
参考。编号/秒/秒/32-33/nse-BSE日期参考。编号/秒/秒/32-33/nse-BSE日期
sub:董事会的变更参考:SEBI(LODR)条例的第30条法规,2015年爵士/女士,我们进一步写信给我们的信。日期为11.05.2024,涉及公司董事会的政府提名董事的提名,并告知,就石油和天然气部(MOP&NG)信件而言。CA-31032/1/2021-PNG-37493日期为10.05.2024 [收到13.05.2024],Shri Rohit Mathur [DIN:08216731] MOP和NG秘书已被任命为公司董事会的政府提名董事2024年5月13日。可以证实,Shri Rohit Mathur和Shri George Thomas既不与公司的任何董事有关,也没有因SEBI/任何其他机构的任何命令而被拒之门外。两位董事的简短概况都附在附件 - i。上面是您的信息和记录。感谢您,