XiaoMi-AI文件搜索系统
World File Search SystemSDV
2025 年 1 月 22 日
印度正经历着向软件定义汽车 (SDV) 的快速转变,通过电气化、自动驾驶和连接方面的进步改变了汽车生态系统。Tata Elxsi 的高级架构师 Sreeja KS 解释了 SDV 如何将硬件与软件分离,实现无缝更新和云集成,从而提高车辆性能和客户体验。Tata Elxsi 支持 OEM 减少 ECU 和接线重量,同时利用 AI-ML 对电动汽车进行预测分析,例如电池健康和续航里程估计。尽管存在云策略模糊性和延迟问题等挑战,但 SDV 的分阶段采用正在获得发展势头,乘用车处于领先地位。
CESA SIA 2025 Vision Sia
Software Panel discussion lead by Martin SCHLEICHER, Continental: • Jan KUBOVY, Research & Development Engineer at BMW • Sara GALLIAN, Senior Manager, SDV & Automative Programs et Eclipse • Derek DE BONO, Group Software Defined Vehicule Product Vice President at Valeo • Magnus LILJEQVIST, Global Technology Manager @ EEA Electrical and Electronics Architecture at Volvo Trucks • Dirk WALLISER, SDV大使
2025 年汽车供应商展望 - AutoTechInsight
• 挑战:软件定义汽车 (SDV) 的宏伟目标与采用必要技术的准备程度之间存在差距。虽然技术问题得到了解决,但 OEM [原始设备经理] 在实施方面遇到了困难,而客户也不清楚自己的 SDV 目标。 • 发展:第一个支持汽车安全的 Linux 发行版将汽车开发与开源社区联系起来,加速汽车和 IT 技术的融合,并推动行业更快的创新。 • 2025 年展望:德国汽车在中国销量下滑等经济挑战使 SDV 投资变得复杂,推动 OEM 通过 Eclipse SDV 等计划进行合作,并加大对集中式软件组织实施成本削减和效率措施的压力。 • 新出现的问题:美国政府促进增加石油产量的政策可能会通过限制电动汽车转型投资来削弱美国汽车行业的竞争力,尽管一些地区经济放缓,但仍使满足全球对电动汽车日益增长的需求的努力变得复杂。 以下是对话的编辑记录。 S&P Global Mobility:今年贵公司遇到的最大挑战是什么?
汽车区控制器s32j100概况表
作为NXP S32平台的一部分,S32J系列可最大程度地利用软件重用,简化各种汽车系统的开发和集成。新的S32J家族是NXP Coreride网络解决方案的核心,为开发SDV架构的公司带来了灵活性,成本效率和部署速度。NXP Coreride网络解决方案结合了硬件和软件,以满足SDV的不断发展的通信需求。

第三季度 | 24 财年业绩
我们在每个新技术重点领域都取得了显著进展——人工智能、软件定义汽车 (SDV) 和网络安全。在人工智能领域,我们在交通运输、医疗和工业产品等领域申请了 53 项专利。我们在 SDV 领域首次与美国 OEM 合作,为其下一代汽车定义架构。我们继续利用 SWC 的全球交易优势,在网络安全领域赢得了一笔价值 1000 多万美元的交易。这些胜利证明了我们差异化的产品,使我们能够成为客户的战略合作伙伴。
生物技术
SEMESTER 1 SDV 108 ............................The College Experience.....................................................................Credits: 1 ENG 105............................Composition I ........................................................................................Credits: 3 BIO 104.
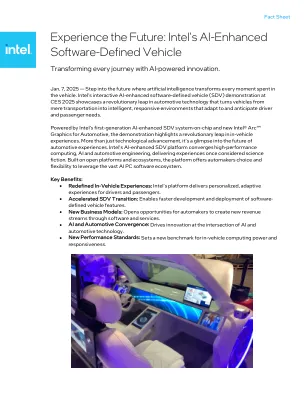
英特尔的AI增强软件定义的车辆
由Intel的第一代AI增强的SDV System-on-Chip和NewIntel®ARC™图形用于汽车,该示范突显了车辆内体验的革命性飞跃。不仅仅是技术进步,还可以瞥见汽车体验的未来。英特尔的AI增强SDV平台收敛高性能计算,AI和汽车工程,提供了经验,曾经被视为科幻小说。建立在开放式平台和生态系统上,该平台提供了汽车制造商的选择和灵活性,以利用庞大的AI PC软件生态系统。
MIH建议的标准软件定义的车辆...
3级SDV标准为最终用户提供了明确的路线图,以了解和体验软件定义的车辆的好处。从开发的角度来看,由于ECU和单功能控制器的数量,传统的EE体系结构非常复杂。软件定义可以合并,降低硬件复杂性。但是,它大大提高了软件开发的复杂性。为了解决这个问题,我们应该寻求标准化基础软件并在所有SDV级别上利用它。一旦我们确定了此基础平台的组成部分,通过利用通用软件元素


在软件定义的车辆中进行实时和高效的感知工作流
摘要 - 随着对软件定义的VEHICE(SDV)的需求不断增长,基于深度学习的感知模型在智能运输系统中变得越来越重要。但是,由于其实质性的要求,这些模型在实现实时和有效的SDV解决方案方面面临着巨大的挑战,这些要求在资源约束车辆中通常不可用。因此,这些模型通常会遭受低吞吐量,高潜伏期和过多的GPU/内存使用量,因此对于实时SDV应用而言,它们不切实际。为了应对这些挑战,我们的研究重点是通过在各种组合环境中整合修剪和量化技术来优化模型和工作流程,并利用诸如Pytorch,ONNX,ONNX运行时和Tensorrt之类的框架。我们系统地进行了分类并评估了三种不同的修剪方法,并结合了多个精确量化工作流程(FP32,FP16和INT8),并根据四个评估指标呈现结果:推理吞吐量,延迟,延迟,GPU/内存使用情况以及准确性。我们设计的技术,包括修剪和量化,以及优化的工作流程,可以达到最高18倍的推理速度和16.5倍越高的吞吐量,同时将GPU/内存使用量最多减少30%,所有这些都对准确性的影响最小。我们的工作建议使用用FP16精度和组修剪来量化的火炬 - 荷兰 - 托管工作流,作为最大程度地提高推理性能的最佳策略。它表现出在SDV中优化实时,有效的感知工作流程的巨大潜力,这有助于增强深度学习模型在资源约束环境中的应用。