XiaoMi-AI文件搜索系统
World File Search SystemSTEREO
Nadia Heninger -UCSD CSE
•创建一对虚拟摄像机 - 虚拟摄像机具有与真实摄像机相同的相机中心 - 两个虚拟摄像机都具有相同的相同:•摄像机旋转矩阵R•摄像机校准矩阵k•整流转换矩阵

合成 FM 立体声发射器 - N5HQ
可用套件的部分列表 RAMSEY 发射器套件 • FM25、MP3FM FM 立体声发射器 • AM1 AM 发射器 • TV6 电视发射器 • FM100 专业 FM 立体声发射器 RAMSEY 接收器套件 • FR1 FM 广播接收器 • AR1 航空波段接收器 • SR2 短波接收器 • AA7 有源天线 • SC1 短波转换器 RAMSEY 爱好套件 • SG7 个人测速雷达 • SS70A 语音扰频器 • MX5、MX10 混频器 • MD3 微波运动检测器 • PH10 峰值保持仪 • STC1 立体声发射器伴侣 RAMSEY 业余无线电套件 • FX 146 VHF 收发器 • HR 系列 HF 全模式接收器 • QRP 系列 HF CW 发射器 • CW7 CW 键控器 • CPO3 代码练习振荡器 • QRP 功率放大器 RAMSEY 迷你套件 还有许多其他套件可供业余爱好者、学校、童子军和纯粹的娱乐使用。新套件一直在开发中。写信或致电索取我们的免费 Ramsey 目录。合成 FM 立体声发射器套件使用说明书 Ramsey Electronics 出版物编号 MFM25A Rev 1.4 首次印刷:1996 年 8 月 版权所有 1996 年 Ramsey Electronics, Inc. 793 Canning Parkway, Victor, New York 14564。保留所有权利。未经 Ramsey Electronics, Inc. 书面许可,不得复制或复印本出版物的任何部分。在美国印刷。
影响客户满意度的因素...
立体声停车系统的设计和开发涉及一组全面的功能要求,制造过程,用户操作舒适性和环境友好。但是,当前的立体声停车系统市场主要集中于以产品为中心的设计和功能成就,而无需充分考虑和满足用户需求。设计理念落后于当代发展的需求。本研究的目标是:1)探索影响立体声停车系统使用的关键因素; 2)检查产品的基本属性,客户期望属性和产品吸引力属性对客户满意度的影响。本研究选择了中国上海的立体声停车系统作为案例研究区域,并通过问卷调查收集了用户数据,样本量为400。定量研究方法用于分析数据。研究结果表明:1)对立体声停车系统的客户满意度受产品的基本属性,客户期望属性和产品吸引力属性的影响; 2)产品基本属性,客户期望属性和产品吸引力属性的三个因素对客户对立体声停车系统的满意度具有重大的积极影响。使用立体声停车系统研究客户满意度具有将设计理念从以产品为中心转移到以用户为中心的实用价值。这意味着,除了考虑立体声停车系统的基本功能要素外,研究如何完全满足用户群体的需求并全面设计和开发立体声停车系统至关重要。

带有元素摄像头的单镜头立体声
摘要 - 相机在其镜头孔的区域中收集光,并且触及孔径的灯区域的光与相邻子区域的光线有所不同。通过分析这种光学结构,可以推断场景中对象的深度,即可以实现“单镜头立体声”。我们描述了用于执行此分析的新型相机。它结合了一个主镜头,以及放置在传感器平面上的凸耳阵列。由此产生的“元素摄像机”提供了有关从主镜头孔界的可能观点的连续观点查看场景时的外观的信息。导出深度信息比双眼立体系统更简单,因为对应问题被最小化。相机提取有关水平和垂直视差的信息,从而提高了深度估计的可靠性。
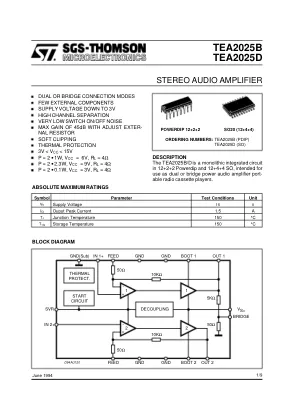
立体声音频放大器-TEA2025B TEA2025D
提供的信息被认为是准确和可靠的。但是,SGS-Thomson微电子学对使用此类信息的后果或对可能因其使用而造成的第三方的其他权利或其他权利侵犯了任何侵犯的后果不承担任何责任。在SGS-Thomson微电子学的任何专利或专利权下,没有任何许可证授予许可。本出版物中提到的规格如有更改,恕不另行通知。该出版物取代并替换了先前提供的所有信息。SGS-THOMSON微电子产品未经授权用作生命支持设备或系统中的关键组件,而无需经过批准SGS-Thomson Microectronics的书面批准。

立体建议水生恒温动物的大小
1. Kendall. K.. Alford, N. MeN., Clegg, WJ & Birchall, JD Nature339, 130-132 (1989)。2. Hoare, MR 等。J. Colloid Interface Sci. 75, 126-137 (1980)。立体建议 SrR-Tucker 1 和 Wilson 建议出版商如何缓解“直接观看”立体对的一个缺点。但是,即使经过多年的练习(我小时候通过盯着重复的墙纸图案不知不觉地获得了这项技术),也需要付出努力才能获得和保持立体视图,而且感知的深度从未像使用立体镜时那样清晰。然而,立体镜并不容易获得或便宜,而且太笨重,无法随身携带。我最近发现,传统立体镜的一个很好的替代品是通过两个平面塑料菲涅尔透镜来观察立体图像,这种透镜现在被广泛用作阅读放大镜。这些透镜并不昂贵,两个透镜合在一起的形状和大小与信用卡一样。光学质量出奇地高,立体图像至少与使用模制塑料双凸透镜的普通折叠立体镜产生的图像一样好。安德鲁·库尔森 英国爱丁堡大学分子生物学系,爱丁堡 EH9 3JR,英国
实时语义立体声匹配-IRIS
摘要 - 场景的理解在机器人技术,自动化,增强现实和许多其他领域至关重要。为了完全完成此任务,一个自主代理必须推断感应场景的3D结构(要知道它的位置)及其内容(了解它看到的内容)。为了解决这两个任务,经过训练的深度神经网络,从立体声图像中推断出语义细分和深度通常是首选的选择。特别是,可以独立训练这两个任务的独立模型或端到端的端到端体系结构来解决语义立体声匹配。到目前为止,这两种解决方案都是不具备的,因为在前一种情况下需要两个正向通行证,或者由于后者中单个网络的复杂性,尽管共同解决这两种任务通常在准确性方面是有益的。在本文中,我们为实时语义立体声匹配提供了一个紧凑而轻巧的体系结构。我们的框架以多阶段的方式依赖于粗到实体的估计,允许:i)即使在嵌入式设备上也非常快速推断,并且与最先进的网络相比,准确性下降的准确性下降,ii)根据特定的应用程序要求,速度的贸易准确性。与独立任务相比,在高端GPU以及嵌入式Jetson TX2上确保语义立体声匹配的优越性,并突出了我们框架在任何硬件和任何应用程序上的多功能性。
