XiaoMi-AI文件搜索系统
World File Search SystemSWATH

平扇形空中作物喷雾的数值分析 - IOPscience
电子邮件:stmf_tasha@yahoo.com 摘要。在农业航空喷洒文献中,喷雾漂移缓解和植物保护产品应用中的喷雾质量仍然是评估股东价值的两个关键因素。通过一系列计算流体动力学 (CFD) 模拟,模拟了 250 米跑道上的偏离目标漂移和地面沉积物的研究。蒸发液滴的漂移模式由一架以 30 米/秒 (60 英里/小时) 的恒定速度飞行的飞机释放,该飞机携带 20 米幅宽的喷杆,喷杆上有 12 个扇形喷嘴,释放高度距地面 3.7 米至 4.7 米。液滴轨迹是根据给定的空速计算的,采用拉格朗日粒子扩散模型,不包括任何风效应扰动。所提出的 CFD 模型预测与引用的文献在广泛的大气稳定度值范围内的预测结果非常吻合。结果表明,随着喷雾释放高度的增加,喷雾漂移和液滴轨迹显著增加。这表明,较低的飞机喷雾释放高度与较低的空速相结合对于提高喷雾质量至关重要,而最大限度地在目标区域均匀沉积对于最大限度地降低喷雾漂移风险具有重要意义。
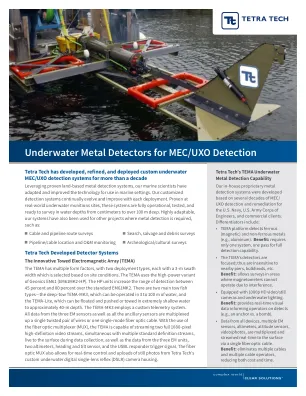
用于 MEC/UXO 检测的水下金属探测器
TEMA 具有多种外形尺寸,有两种部署类型,每种都有 3 米的幅宽,可根据现场条件选择。TEMA 使用 Geonics EM61 (EM61MK2-HP) 的高功率版本。HP 装置比标准 EM61MK2 将检测范围增加了 45% 到 80%。拖鱼主要有两种类型 - 深拖 TEMA-MK3,可在 3 至 100 米深的水中操作,以及 TEMA-Lite,可在极浅的水中漂浮和推动或拖曳,深度约为 40 米。TEMA-MK3 采用定制遥测系统。来自三个 EM 传感器以及所有辅助传感器的所有数据都通过单根双绞线或一根单模光纤电缆进行多路复用。通过使用光纤多路复用器 (MUX),TEMA 能够在数据收集期间将两个全 1080 像素高清视频流与多个标准清晰度流同时实时传输到水面,以及来自三个 EM 单元、两个高度计、航向和倾斜传感器以及 USBL 响应器触发信号的数据。光纤 MUX 还允许实时控制和上传来自 Tetra Tech 定制水下数码单反 (DSLR) 相机外壳的静态照片。
了解农药喷雾漂移 - 净
•缓冲区在减轻农药喷雾漂移风险中起着至关重要的作用,尤其是在靠近敏感的栖息地或区域应用时。为了有效地减少潜在的喷雾漂移的影响,涂抹器应维持指定的喷雾缓冲区区域,即处理过的侧面边缘(施用农药的区域)和敏感栖息地之间的区域。•此缓冲液是一个无喷雾区,可防止影响非目标区域,确保喷雾不会污染水体,野生动植物栖息地或其他敏感环境。重要的是要注意,缓冲区在不同的活性成分,配方,应用方法和靠近最近敏感栖息地的情况下可能会有所不同。有关特定缓冲区要求的详细信息可以在农药产品标签上找到。•害虫管理监管机构(PMRA)提供了一个喷雾缓冲区计算器,涂药者可以使用该机构来计算其特定农药应用和当地条件所需的适当缓冲尺寸。对于那些希望准确确定缓冲区尺寸的人至关重要,允许更精确的应用,同时仍然最大程度地减少漂移风险。可以在农药施用器的喷雾缓冲区计算器上找到更多信息-CANADA.CA。

全球激光雷达系统的要求:覆盖墙到墙的星载激光雷达
激光雷达是测量植被下方裸地高程和结构的最佳技术。因此,机载激光扫描 (ALS) 被广泛应用于各种应用。然而,由于单位面积成本高,ALS 无法在全球范围内使用,也不经常更新。星载激光雷达可以绘制全球地图,但能量需求限制了现有的星载激光雷达只能进行稀疏采样任务,不适合许多常见的 ALS 应用。本文推导出计算激光雷达卫星在给定一组特性(开源发布)下可以实现的覆盖范围的方程式,然后使用云图确定在一定时间范围内实现连续全球覆盖所需的卫星数量。利用现有在轨技术的特性,单个激光雷达卫星在生成 30 米分辨率地图时可以具有 300 米的连续扫描宽度。因此,每 5 年需要 12 颗卫星来生成连续地图,而 5 米分辨率则需要 418 颗卫星。建造 12 个目前在轨的激光雷达系统可能成本过高,因此本文讨论了降低全球激光雷达系统 (GLS) 成本的技术发展潜力。一旦这些技术达到足够的准备水平,就可以经济高效地实现 GLS。

人类心理负荷:一项调查和一个新的包容性定义
人类心理负荷可以说是人因工程学中最常被提及的多维结构,在神经科学和神经人体工程学中也得到了发展。其特征存在不确定性,这促使人们设计和开发计算模型,因此最近计算机科学学科积极支持该模型。然而,它在人类绩效预测中的作用是有保证的。这项工作旨在通过考虑、定义、测量技术以及应用,综合人类心理负荷评估的当前最新水平。研究结果表明,尽管相关研究工作越来越多,但似乎尚未完全建立单一、可靠且普遍适用的心理负荷研究框架。造成这种差距的一个原因是存在大量基于不同理论假设的操作定义,而这些假设很少被集体研究。第二个原因是,三种主要测量类别(即自我报告、任务绩效和生理指标)已被单独或成对使用,但很少一起使用。多种定义相互补充,我们提出了一种新颖的包容性心理工作量定义,以支持下一代基于实证的研究。同样,通过综合运用生理、任务绩效和自我报告措施,可以对

后勤机制 - 海军历史和遗产司令部
高度。感觉到机器撞到树上,飞行员用右手抵住仪表盘。这只倒霉的鸟继续在树丛中飞了 750 英尺才停下来。驾驶舱的前部在撞击中被卷走,只剩下座位、左侧面板和大约 1/2 英尺的地板。虽然飞行员被夹在座位和面板之间并受了轻伤,但随后被 RIO 救出,RIO 安然度过了这次事故而没有受到任何伤害。幸运的是,没有起火。空间站直升机很快就到了,把机组人员送到了空间站。~ Grampmv Pettibone 说:“我很生气,但不要太在意那些最低限度!除了常识之外,缺乏……可接受的备选方案应该足以让我们知道该飞行计划并熟悉 OpNavlnst 3710.7C。该手册中有一些很好的读物,它出版的目的是为了帮助防止这种事故。这本好书中提出的要求并不是作者凭空捏造的。除了冷酷的事实和统计数据外,多年的经验也得到了充分的利用,旨在帮助我们达到这些最低标准,以帮助我们所有人保持在能力范围内。
AFGE 理事会 238 国会简报.docx
随着联邦机构开始恢复面对面工作,考虑到 EPA 在 COVID-19 疫情期间的效率,AFGE 与该机构协商,允许 EPA 员工继续全职远程工作。根据该协议,在仅仅九个月后,该机构就迅速试图通过拒绝大量远程工作申请来限制协议范围。正如协议本身所承认的那样,提供远程工作是一个卖点,有助于从 STEM 申请人库中招募 EPA。该机构报告称,在工作机会排除远程工作后,申请人一直在拒绝 EPA 的工作机会。目前,EPA 提供的四分之一的工作机会没有被接受。远程工作是大多数 STEM 工作者正在寻找的就业方案的一部分。在 EPA 内部,我们看到更多经验丰富的 EPA 员工转移到可以进行远程工作的办公室。约 85% 的联邦雇员表示在家工作对他们的生活质量有好处。联邦雇员认为好处不仅仅是简单的便利。超过四分之三的人认为在家工作时他们的工作效率更高。大多数人表示,他们利用不用通勤的额外时间来学习新技能。谈到生产力的底线,近 70% 的联邦雇员表示远程工作和亲自到场工作没有区别。
NISAR 利用计划
美国宇航局-印度空间研究组织 L 和 S 波段合成孔径雷达 (NISAR) 任务是美国宇航局和印度空间研究组织合作开展的一项任务,计划于 2024 年 1 月发射,最短任务寿命为 3 年。该任务通过高分辨率成像(2-30 米)、宽幅(240 公里)、高精度指向和轨道控制以及短重访周期(12 天)进行了优化,并采用了偏振测量和干涉测量技术,用于研究灾害和全球环境变化,特别支持其核心科学学科:生态系统、冰冻圈、固体地球科学和沿海海洋。一些重要的任务和仪器参数如表 1 所示。该卫星旨在提供地球的详细视图,以观察和测量地球上一些最复杂的过程,包括生态系统干扰、冰川和冰盖动态、由构造和非构造过程引起的陆地变形、沿海过程动态和自然灾害。除了科学需求外,该任务还将通过快速事件驱动下行链路、处理和交付相关数据来支持灾难响应。NISAR 拥有开放数据政策,任务数据将在必要的发射后传感器特性分析后提供给全球科学界,预计发射后 6 个月内完成。来自不同学科的研究人员和科学家将有很好的机会规划 NISAR 数据的利用并进行互动学习。
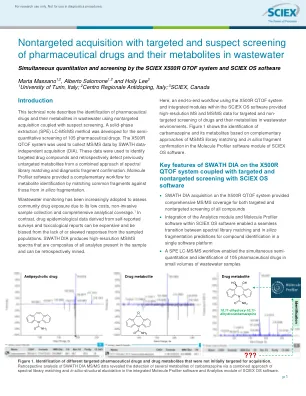
非目标是对药物的有针对性和可疑筛查在废水中的代谢物
化学物质和样品:目标分析物列表包括105种药物和3种替代物质内部标准。单个纯标准标准以制备甲醇中的库存溶液,从中校准标准(5-1000 ng/l)在milliq水中制备以进行半定量。的进水废水样品作为24小时复合材料。收集后,将1 L等分试样的复合废水转移到冷藏玻璃瓶中,并存储在-20°C下直至分析。样品制备:将100 mL废水样品以4000 rpm离心5分钟,并通过0.22 µm滤波器进行真空过滤。将30 ml等分试样的过滤废水施加了位替型内部标准,并使用Oasis HLB SPE墨盒提取(200 mg,6 cm 3,Waters,Waters,Milford,MA)。将每个墨盒用5 ml甲醇和5 ml的Milliq水预先加载,然后再加载样品,然后用真空干燥并用10 mL甲醇洗脱。蒸发干燥后,将残留物用50 µL甲醇重构进行LC-MS/MS分析。尖刺的Milliq水,以半定量检测限制(LOD)和提取回收率进行半定量评估。色谱法:使用现象Kinetex C18柱(100 x 2.1 mm,1.7 µm,p/n:00d-4475-an)在Sciex eotlc AC系统上进行LC分离。使用0.5 mL/min的流速,使用注射体积为5 µL,柱温度为45°C。所使用的LC条件如表1所示。表2显示了用于质谱仪的方法参数。质谱法:使用X500R QTOF系统以正面和负电喷雾电离模式进行分析。Swath DIA方法由16个可变窗户组成,覆盖M/Z 130–520的质量范围。
哥白尼哨兵-3 SLSTR 陆地用户手册
8.2.1 在哪里可以找到有关最新版本处理的资料? ...................................................................... 48 8.2.2 如何找到用于处理单个产品的版本? ...................................................................... 48 8.2.3 如何获取有关过去异常或事件的信息? ...................................................................... 48 8.2.4 为什么热通道图像中有时会出现空白区域? ...................................................................... 49 8.2.5 如何从连接点插值到图像网格? ...................................................................................... 49 8.2.6 如何计算 L1/L2 图像中任意像素的采集时间? ...................................................................... 50 8.2.7 如何计算卫星与太阳之间的相对角度? ............................................................................. 50 8.2.8 如何在 1 级产品中将亮温转换为辐射度? ................................................................ 50 8.2.9 如何在 1 级产品中将辐射度转换为反射率? ................................................ 51 8.2.10 如何找到 SLSTR 光谱响应函数? ...................................................................................... 51 8.2.11 如何找到影像中条带的中心? ...................................................................................... 51 8.2.12 什么是填充? ............................................................................................................. 51 8.2.13 什么是孤立像素,它们有用吗? ...................................................................................... 52 8.2.14 为什么影像两侧有一排未填充的像素? ............................................................................. 52 8.2.15 1 级产品中不同云罩之间有什么区别? ............................................................. 53 8.2.16 如果指向标志升起,这意味着什么? ............................................................................. 53 8.2.17 如何在产品清单中查找质量信息? ............................................................................. 54 8.2.18 如何计算 1 级的每像素不确定度? ........................................................... 55 8.3 如果您有疑问 ................................................................................................................ 55