XiaoMi-AI文件搜索系统
World File Search SystemSem
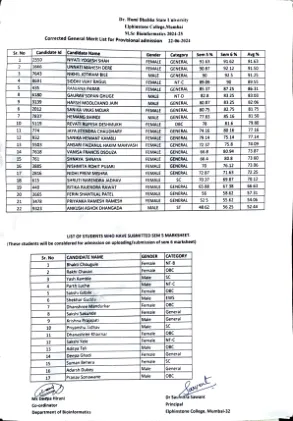
M.Sc.生物信息学临时功绩列表,2024-25SEM 6“
候选人•D候选人名称性别catecorv 2550 n•i yati Yogfsh shah女性将军1666 unnati mah esh oe女性将军7643 ni kh il。 div>)Qtiram Blte男性将军8691 Siddhi Vuav Bagul女性NT -C 435 Ranjana Paras女性将军女性6180 Gaurav Sopan Ghue NT -D 3139 HA RSH Moolchnd Jain D. Jain D. Jain D. 774 Java Jitendra Chaudharv Female Female General 932 Sanika HEMANTA HEMANTA HEMANT KAMANT KAMABLI FEMALI FEMALI FEMALE Genral 5503 Ansari Faizan Hakim mahvash female general 7618 Vanisa franos dsouza female general 761 shnava shnaya female general Shrutinarendrajadhav female sc 440 ritika拉金德拉·拉瓦特(Rajendra Rawat)女性将军

SEM 月度监测报告 SEM–22–082
DAM 是每日 11:00 举行的每日拍卖。DAM 的参与并非强制性的。在 DAM 之后,日内拍卖 (IDA) 使参与者能够更实时地调整其实物头寸。IDA1 和 IDA2 与 GB 市场相结合。IDA3 是 SEM 的本地市场。日内连续市场 (IDC) 还为市场参与者提供了完善其市场地位并最大限度地减少其在平衡市场 (BM) 中的风险敞口的机会。通过平衡市场 (BM),输电系统运营商 (TSO) 从市场参与者那里购买和出售电力,以确保电力的需求和供应始终完全匹配

无标题
电磁波是所有等离子体(实验室聚变等离子体或天体物理等离子体)的固有组成部分。研究电磁波特性的传统方法依赖于适合在当今经典计算机上实现的麦克斯韦方程的离散化。传统方法对于量子计算实现并不有效——量子计算是一种未来的计算资源,它提供了极快的速度和显著降低计算成本的诱人可能性。本文讨论了与在量子计算机上实现麦克斯韦方程相关的两个主题。第一个主题是制定麦克斯韦方程的量子薛定谔表示,用于在冷、非均匀和磁化等离子体中传播波。这种表示允许幺正、能量守恒、演化,并且很方便地适用于量子计算机的适当离散化。借助这些结果,第二个主题是开发一系列幺正算子,这些算子构成了量子比特格子算法 (QLA) 的基础。 QLA 适用于量子计算机,可在现有的经典计算机上实施和测试,以保证准确性以及计算时间随可用处理器数量的缩放。为了说明麦克斯韦方程的 QLA,我们给出了电磁波包在空间中局部非色散介电介质中传播和散射的时间演化全波模拟结果。
在这里título
Factors that predispose patients to ketoacidosis include a low carbohydrate diet, dehydration, acute illness, surgery (see Section Surgery), a previous ketoacidosis, insulin deficiency from any cause (including insulin pump failure, history of pancreatitis, or pancreatic surgery), malnourishment/reduced caloric intake or increased insulin requirements due to infections, and alcohol abuse.jardiamet。减少需要胰岛素的患者的胰岛素剂量时,应谨慎行事(请参阅第4.2节和给药方法)。考虑监测酮症酸中毒,并在已知易感酮症酸中毒的临床情况下暂时停止Jardiamet。在这些情况下,即使贾地尼特治疗被中断,也要考虑监测酮。
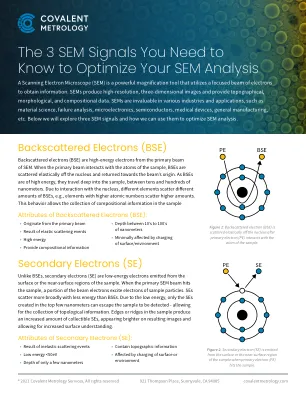
优化 SEM 分析需要了解的 3 个 SEM 信号
在 SEM 过程中,样品会发射出特征 X 射线。我们可以使用能量色散 X 射线光谱仪 (EDS 或 EDX) 来检测特征 X 射线,以进一步表征元素成分。当主束电子撞击内壳电子时,会产生一个空隙,来自原子较高壳层的电子会落下以填补空隙。这种电子落下会释放原子以 X 射线形式发射的能量。特征 X 射线的能量模式取决于原子中电子壳层之间的能级差异,而每种原子的能级差异都是独一无二的。该信号可以从材料深处逸出,从而可以对 100 纳米到微米深度之间的成分进行调查。
扫描电子显微镜(SEM)
光学成像系统(显微镜、望远镜或照相机)的分辨率可能受到镜头缺陷或错位(смещение)等因素的限制。然而,由于衍射的物理特性,任何光学系统的分辨率都有一个主要限制。分辨率性能达到仪器理论极限的光学系统被称为衍射极限。
扫描电子显微镜(SEM)
•扫描电子显微镜是使用精细的能量电子束来观察和分析散装样品的表面微观结构的仪器。•电子光系统用于形成电子探针,该探针可以以栅格模式在样品表面扫描。•通过该梁与样品的相互作用产生了各种信号。可以通过适当检测器的应用来收集或分析这些信号。•对于成像,可以组装在栅格图案中每个位置上获得的信号振幅以形成图像。

年度报告 - SEM委员会
随着我们进入新市场安排的第二年,我们建立在这些新的,更高效和竞争的安排的第一年中所观察到的成功。我们继续看到该系统的设计工作。我们的互连器正在朝着正确的方向流动,在系统上容纳更高的可再生能源水平,市场参与者可以使用更多的交易机会,消费者看到了市场力量对批发价格施加下降压力的好处。与前一年的同期相比,日前市场的平均价格几乎降低了36%。增加了风能的可用性,降低的燃油成本和降低的需求,所有这些都促成了这些较低的价格。,我们继续看到价格与风能可用性之间的直接相关性,价格较低,与高风能相关的价格较低,而在风能可用性较低时观察到的价格较高。尽管我们由于19日大流行而经历了一些延误,但我们欢迎DS3计划的进展,该计划旨在提高系统可以适应的可再生能源水平。这将有助于我们进一步利用整个市场可再生生成的好处。