XiaoMi-AI文件搜索系统
World File Search SystemSimulators

模拟中态势感知的客观测量...
使用人体患者模拟器的一个主要限制是缺乏客观、经过验证的人体表现测量方法。如果要使用模拟器来评估医疗从业人员和团队的技能和培训,或者评估新流程或设备设计对整体系统性能的影响,则客观测量必不可少。情境意识 (SA) 是指一个人对其动态环境的感知和理解。这种意识和理解对于做出正确的决策至关重要,最终导致医疗保健环境中的正确行动。SA 的客观测量可能比传统的绩效测量更敏感和更具诊断性。本文回顾了 SA 理论,并讨论了在模拟医疗环境中开发 SA 客观测量所需的方法。本文还介绍了对医疗保健中个人和团队绩效的 SA 数据的分析和解释。
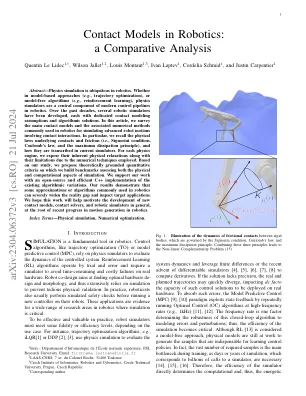
机器人技术中的联系模型:比较分析
摘要 - 物理模拟在机器人技术中无处不在。在基于模型的方法中是否(例如,轨迹优化)或无模型算法(例如,增强学习),物理模拟器是机器人技术中现代控制管道的核心组成部分。在过去的几十年中,已经开发了几个机器人模拟器,每个模拟器都有专用的接触建模假设和算法解决方案。在本文中,我们调查了主要的接触模型以及在机器人技术中常用的相关数值方法,用于模拟涉及接触相互作用的高级机器人运动。特别是我们回想起接触和摩擦的物理定律(即,Signorini条件,库仑定律和最大耗散原则),以及如何在当前的模拟器中转录它们。对于每种物理引擎,由于使用的数值技术,我们暴露了它们固有的身体放松以及它们的局限性。基于我们的研究,我们提出了理论上基础的定量标准,在该标准上我们构建了评估模拟物理和计算方面的基准。我们通过现有算法变化的开源和有效的C ++实现来支持我们的工作。我们的结果表明,在机器人技术中常用的某些近似值或算法可以严重扩大现实差距并影响目标应用程序。我们希望这项工作将有助于激励新的接触模型,联系求解器和机器人模拟器的开发,这是机器人技术中最新动态进展的根源。

飞机控制加载系统文献综述...
飞行模拟器有不同的用途。由于硬件限制,全尺寸飞行模拟器通常非常昂贵,并且通常取决于飞机类型。因此,人们观察到并研究了使用虚拟现实设计飞行模拟器的需求 [1-2]。训练飞行员最安全且最具成本效益的方式是通过飞行模拟器。模拟器可帮助飞行员体验涉及真实飞行的各种情况,而无需身临其境并避免风险。飞行模拟器的重要部分是所谓的控制加载系统。飞行装置实例的数量用于管理飞机的运动、飞行控制和驾驶舱仪表。该系统包括硬件和软件部分。通过数字计算机上的程序员进行的模拟属于软件,而结构研究属于硬件。另外两个软件模块支持模拟,其中一个控制 6 个自由度的座舱运动,另一个实现座舱控制装置上的负载再现系统 [3]。飞行模拟器是一种人在回路的实时模拟系统,其中控制加载系统用于模拟飞行员操纵真实飞机时的力感应。全数字控制电控加载系统比液压系统具有技术和成本优势,成为大型模拟器的理想选择 [4]。在过去的几十年里,使用飞行模拟器进行飞行员训练在提高飞行安全性方面发挥了重要作用。飞行模拟器监管资格的现行标准涉及在各种飞机参数的设定公差范围内匹配规定的一组飞行测试数据。尽管综合资格测试指南 (QTG) 验证测试表明模拟与飞行测试数据相符,但飞行员有时会抱怨模拟器中的某些操作感觉不像飞机 [5]。

分析NS-3模块QKDNETSIM,以模拟QKD网络
量子技术近年来已经取得了重大进步Cao等。(2022); Illiano等。(2022);辛格等。(2021)。量子计算机的计算能力的增加正在危害用于在用户之间分配密钥的加密算法,包括像HTTPS一样广泛的协议。尽管如此,量子技术还提供了这些算法的替代方法:量子密钥分布(QKD)协议允许两个节点通过量子通道在键上达成一致,以至于窃听者无法在未检测到键的情况下获得窃听器获得键。然后可以使用此密钥来加密两个节点之间的通信。由于所需材料的高成本和技术缺乏成熟,目前实施的QKD网络的数量非常小。因此,研究人员必须采用模仿量子网络行为的模拟器。根据研究范围Aji等人的范围有多种选择。(2021):一些模拟器专注于表示量子通道的物理层,而另一些模拟器则允许用户定义整个网络,在该网络之间可以在其中进行节点之间执行QKD。为Python编写的模拟器“ Qunetsim”和“ NetSquid”是最受欢迎的选择。网络模拟器NS-3由于其细节水平和自定义功能,因此在科学和教育社区中广泛使用。存在针对NS-3实现的模块,用于量子网络的仿真,名为qkdnetsim Mehic等。这个级别的(2017年),是由奥斯特拉瓦技术大学的研究人员开发的。qkdnetsim比其他模拟器的优点来自NS-3的粒度:此模拟器允许每个组件的深度配置,并且通过模拟网络发送的数据包已充分定义,包括所有涉及所有协议的标题。

面向未来航空的飞行模拟
• DLR 飞行系统研究所飞行模拟器简史 • DLR 飞行器模拟器 (AVES) • AVES 研究应用 • AVES 的模拟基础设施 • AVES 中的模拟工程研究 • 结束语
面向未来航空的飞行模拟
• DLR 飞行系统研究所飞行模拟器简史 • DLR 飞行器模拟器 (AVES) • AVES 研究应用 • AVES 的模拟基础设施 • AVES 中的模拟工程研究 • 结束语

运输系统中的人机界面 - MDPI
摘要:本文概述了各种运输方式的商业或实验运行中的人机界面 (HMI) 设计和命令系统。它从车辆自动化设备和不同应用领域的模拟器的角度介绍和评论了不同的 HMI。考虑到认知和自动化领域,本研究根据工业和文献综述,重点介绍了人为因素和不同行业的经验。此外,为了更好地聚焦目标并扩展所研究的工业全景,分析涵盖了各种运输方式中最有效的模拟器,用于培训操作员以及安全和人机工程学领域的研究。特别关注可能适用于未来列车车厢的新技术,例如视觉显示和触觉共享控制。最后,提出了人为因素的综合及其在监控或驾驶辅助方面的局限性。
2025年1月11日,星期六混合计划
1。知道有关使用6步方法2的胎儿扫描方法的理论2。知道有关胎儿心脏超声扫描BT方法的理论4。获得执行6步方法的实用技能和20+2架飞机方法5。获取胎儿心脏超声扫描的方法6。获得执行心脏扫描的实用技能7。获得了识别模拟器异常心脏的技能8。知道有关BT妇科扫描方法的理论9。获得执行妇科扫描的实用技能10。获得了在模拟器上识别异常妇科扫描的技能:现场虚拟•Gihad Chalouhi -Romain Corroenne•Chiara Landolfo -Catalina valencia -Catalina valencia•Suresh Seshadri

外科医生和工程师
Bijan Najafi博士,MSC,洛杉矶分校的终身手术教授,将发表主题演讲,“伪造合作伙伴关系,转型护理:数字健康革命的工程师和外科医生”。关于建立更好的手术模拟器的特别小组 - 跟进2024年会议的激动人心的讨论 - 将有外科医生教育者,学术工程师和模拟器行业代表:Dmitry Nepomnayshy,MD,MSC,FACS,FACS,FACS,FACS,FACS,FACS,Surgery of Surgery of Surgery of Surgery of Surgery of Surgery of Burlington的Umass Chan-Lahey;诺曼俄克拉荷马大学计算机科学学院副教授Doga Demirel,博士学位,硕士学位;和直观手术的高级软件工程师Tansel Halic博士。建立在去年的首届Do-youranf(DIY)模拟器/模型竞赛的成功基础上,有18位参赛者将展示他们的DIY模拟器/模型,旨在突出手术模拟社区的协作和创新精神。