XiaoMi-AI文件搜索系统
World File Search SystemSin

CrN 外延薄膜中的各向异性电子相变
𝑑 𝑥 2 −𝑦 2 和 𝑑 3𝑧 2 −𝑟 2 个轨道,其中 I oop = [ I 90 ˚− I 30 ˚•sin 2 30˚)/cos 2 30˚]。为了简化
通过器件结构设计提高Si-GaN单片异质集成共源共栅场效应晶体管的击穿电压
摘要 — 本工作研究了影响采用转移印刷法制备的Si-GaN单片异质集成Casccode FET击穿电压的因素。这两个因素是Si器件的雪崩击穿电阻和SiN电隔离层的厚度。设计了Si MOSFET和Si横向扩散MOSFET(LDMOSFET)两种器件结构,研究了Si器件的雪崩击穿电阻对Cascode FET击穿特性的影响。分析了SiN电隔离层厚度的影响。最后,单片集成Cascode FET的击穿电压达到了770 V。索引术语 — 单片异质集成;Cascode FET;击穿电压;LDMOS;极化电荷。

QuDPas-FHA:空间信息网络中量子防御隐私保护快速切换认证
摘要:空间信息网络 (SIN) 已从地面网络发展为扩展网络,增强了通信能力并推动了增强智能研究。然而,由于实施不充分和高访问延迟等潜在风险,通信安全至关重要。这可能使恶意组织能够访问网关并危及系统的安全和隐私。这项工作提出了一种新颖的框架和身份验证协议,以简化将安全措施纳入 SIN 内未加密无线通信的过程。所提出的身份验证协议基于签名加密和 HMAC,可确保通信机密性、访问身份验证和匿名性。该协议采用格密码术并表现出对量子攻击的弹性。此外,该协议通过考虑适当的方法来监督可撤销密钥,在确保用户匿名的同时保护身份管理。评估的协议满足消息认证、不可链接性、可追溯性和身份隐私标准,可阻止多种安全风险,包括重放攻击、中间人攻击、节点模拟和量子攻击。与现有研究相比,我们的协议在 SIN 框架内以足够的功能开销实现安全通信方面表现出巨大的潜力。

Cora 2023初步程序
否:法国的Yannick Allanore短暂休息时间咨询01:SLE案:玛格丽塔·禅(Margherita Zen)(意大利)讨论者:LuísInês(葡萄牙),Ioannis Parodis(瑞典),Edward

晶圆粘结后的晶圆边缘平面化
使用Tencor的HRP-250来测量轮廓。使用了来自Cabot的SS12和来自AGC的CES-333F-2.5。在将晶片粘合到粘合之前(氧化物到氧化物和面对面),将顶部晶圆的边缘修剪(10毫米),并同时抛光新的斜角。这可以防止晶片边缘在磨/变薄后突破[1]。将晶圆粘合后,将散装硅研磨到大约。20 µm。之后,通过反应性离子蚀刻(RIE)将粘合晶片的剩余硅移到硅硅基(SOI) - 底物的掩埋氧化物层(盒子)上。另一个RIE过程卸下了2 µm的盒子。之后,粘合晶片的晶圆边缘处的台阶高为3 µm。随后沉积了200 nm的氮化物层,并使用光刻和RIE步骤来构建层。此外,罪被用作固定晶片的si层的固定。必须将设备晶圆边缘的剩余步骤平面化以进行进一步的标准处理。为此,将剩余的罪硬面膜(约180 nm)用作抛光止损层。在平面化之前,将4500 nm的Pe-Teos层沉积在罪恶上。这有助于填充晶圆的边缘。在第一种抛光方法中,将氧化物抛光至残留厚度约为。用SS12泥浆在罪过的500 nm。在这里,抛光是在晶片边缘没有压力的情况下进行的。然后将晶圆用CEO 2泥浆抛光到罪。用CEO 2浆料去除氧化物对罪有很高的选择性,并且抛光在罪恶层上停止。第一种抛光方法花费的时间太长,将氧化物层抛光至500 nm的目标厚度。此外,在抛光SIO 2直到停止层后,用SS12稍微抛光了罪。最后,高度选择性的首席执行官2 -lurry用于抛光罪。结果表明,步进高度很好,但是弹药范围很高(Wafer#1)。第二种方法的抛光时间较小,并在500 nm上停在SIO 2上,而最终的抛光和首席执行官2 -slurry直至罪显示出良好的步进高度,并具有更好的罪恶晶圆范围(Wafer#2)。

量子信息理论解决方案 5
1 − F ( | a ⟩ , | b ⟩ ) 2 ,其中 | a ⟩ 和 | b ⟩ 是纯态,并且隐含着 δ ( | a ⟩ , | b ⟩ ) := δ ( | a ⟩⟨ a | , | b ⟩⟨ b | )(保真度也类似)。我们可以固定一个基础来表示状态 | a ⟩ 和 | b ⟩ ,即 | a ⟩ = | 0 ⟩ 和 | b ⟩ = cos θ | 0 ⟩ + sin θ | 1 ⟩ 。注意 F ( | a ⟩ , | b ⟩ ) = |⟨ a | b ⟩| = | cos θ | 。迹距离也是:
信仰与胜利 - 1952 年 3 月
救赎在圣经中意味着从罪恶和邪恶中解脱出来;正如保罗在罗马书 7:14 中所说,他谈到自己在律法之下处于罪恶之下的状况时,他是“属肉体的,已经卖给了罪”。一个处于罪恶中的人,通过自私、贪婪和世俗的顺从,屈服于肉体的欲望,经常撒谎、偷窃、酗酒、赌博、通奸、行巫术(为了算命和迷信),以及公开反抗光明和对上帝在今生对他的要求的知识,将自己卖给了撒旦。人们以这种方式将自己卖给了魔鬼,成为他们主人(撒旦)的奴隶,处于一种无法将自己从这种奴役状态中拯救出来的状态。在这种情况下,他们的灵魂迷失了,上帝的愤怒降临到他们身上,悬在他们头上的罪恶的惩罚是永恒的死亡和毁灭。因为罪的工价乃是死亡和毁灭,凡继续住在其中的人,唯有上帝的礼物(基督和救恩)乃是永生,藉着我们的主耶稣基督。读罗马书 6:23。根据以赛亚书 59:1、2,他的罪孽使他与上帝隔绝,他的罪使上帝掩面不顾他,上帝不会听他的话,也不会眷顾他。
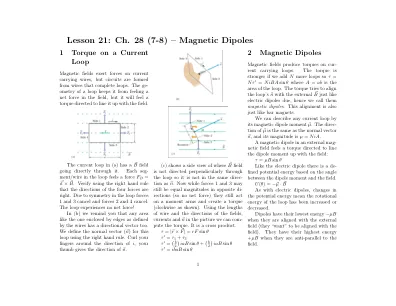
第 21 课:第 28 章 (7-8) – 磁偶极子
磁场会对载流环路产生扭矩。如果我们再添加 N 个环路,扭矩会更大,因此 τ = Nτ ′ = NiBA sin θ 其中 A = ab 是环的面积。扭矩会尝试使环的 ⃗n 与外部 ⃗ B 对齐,就像电偶极子一样,因此我们将它们称为磁偶极子。这种对齐也就像条形磁铁一样。我们可以用其磁偶极矩 ⃗µ 来描述任何电流环路。⃗µ 的方向与法向矢量 ⃗n 相同,其大小为 µ = NiA 。外部磁场中的磁偶极子会感受到一个扭矩,该扭矩使偶极矩与场对齐:τ = µB sin θ 与电偶极子一样,存在一个基于偶极矩和场之间角度的定义势能。 U (θ) = − ⃗µ · ⃗ B 与电偶极子一样,势能的变化意味着环的旋转能量增加或减少。当偶极子与外部场对齐时(它们“希望”与场对齐),它们的最低能量为 − µB。当它们与场反向平行时,它们的最高能量为 + µB。
det mediske fakultetordinærekann,模量1,第2块
基因的启动子/增强子区域。当Carine受体结合与响应项的结合通过其配体的结合激活时,其启动子/增强子中具有响应元件的基因会在转录上向上调节。即使使用其配体激活核心受体,也不会调节其促进中没有这种DNA序列/反应元件的基因。激活核心受体的配体的例子是类固醇激素和各种营养素(脂肪酸,维生素A,维生素D)。预计不会提到下面提到的细节,但是应该说明一个短的DNA序列重复两次会导致不同的响应元素。[核心受体结合的响应元件基于两个六核苷酸(AGGCA)的重复序列。是什么赋予独特的绑定座椅

糖尿病中皮肤病的代谢控制和营养状态危险因素
摘要目的:确定2型糖尿病患者中营养状况和代谢控制的皮肤病的概率,而无需全身性动脉高压,没有高胆汁疾病,没有高胆汁疾病。 div>方法论:糖尿病患者2型患者的病例和对照组的设计,无系统性动脉高血,没有高血率的山脊,没有高脂肪杆菌。 div>病例组是皮肤病患者,并控制患有皮肤病的患者,样本量分别为121和116。 div>研究了代谢控制和体重指数,通过身体检查进行了皮肤病的诊断。 div>统计分析包括多次后勤回归和事件发生概率的计算。 div>结果:解释皮肤病的多重后勤回归模型包括营养状态和代谢控制(p = 0.001);皮肤病回归方程为y = -6,089 +1,195(营养状态)+3,967(代谢控制)。 div>当有足够的肥胖症和代谢控制时,表现皮肤病的可能性为21.3%,如果代谢控制不适当并且存在肥胖症,则表现皮肤病的可能性为93.5%。 div>结论:发现的结果表明,营养状况不佳和不适当的Tabolic控制与糖尿病皮肤病风险增加显着相关。 div>关键字:糖尿病;皮肤疾病;营养状况;高血糖;肥胖。 div>