XiaoMi-AI文件搜索系统
World File Search SystemSkeleton

颅后骨骼
心脏的基本形式虽然人体所有血管的具体排列因动物而异,但这些变化是基于基本脊椎动物计划的修改(您已经在实验室中已经过了)。所有主要动脉和静脉的布置和名称在所有脊椎动物中都是相似的,并且在您的文本中进行了描述。我想在演讲中涵盖的两件事是: - 我们心脏中看到的进化趋势 - 我们在主动脉弓中看到的进化趋势。虽然在您的教科书中分别考虑了这些内容,但我想将这两组结构的趋势一起考虑在一起,而不是在讲座中分别考虑。从系统发育上,心脏可能始于没有明显的腔室或瓣膜的收缩血管 - 就像两栖动物一样。虽然这似乎效率低下,但在这一点上,有机体是无柄的,大多数交换仍在整个身体表面进行。在这些条件下,这种循环形式足以满足他们的需求。随着原子化的发展,我们看到了真正的心脏的发展。在早期脊椎动物中,接收所有静脉血的心脏的第一个腔室是鼻窦静脉。这导致中庭进入中庭,进而进入心室,最终导致动脉圆锥体。每个室通过单向阀与前者分开。所有腔室都是肌肉发达的,并且都能够产生自主节奏(即每个人都有类似起搏器的属性)。管状心脏的屈曲和膨胀使心脏转向不同动物的不同构型,但血液的内部路径总是相同的。心脏从相对直的管变成鲨鱼和鱼中具有独特的“ S”形状,使薄壁的鼻窦静脉和心房在心脏前的心房躺在心室上方。

Skeleton Technologies 超级电容器 - 铁路新闻
Jüri Raatma 法律顾问 + 20+ 年私营和公共部门法律经验 + 前爱沙尼亚财政部长、经济部长和司法部长顾问 + 曾担任 Elering、Eesti Telekom、爱沙尼亚铁路、EVR Cargo 等公司的理事会成员
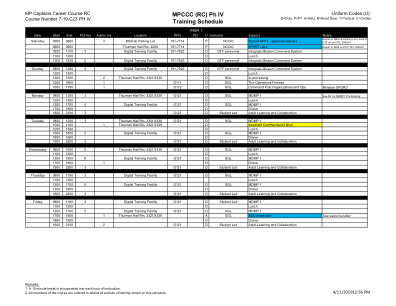
骨架时间表 MPCCC-RC 第四阶段.xlsx
星期六 0500 0600 3 MSCoE 停车场 191-7714 P NCOIC 记录 APFT - 批准豁免 向 DTF 前面的 MSCoE 停车场报告,带单位 705,5500/01 0600 0800 Thurman Hall Rm。2269 191-7714 P NCOIC HT/WT - ALL 向 2269 报告,带 PH II 705,5500/01 0930 1100 3 数字培训设施 191-7820 D DTF 人员集成任务指挥系统 1100 1200 D 午餐 1200 1830 5 数字培训设施 191-7820 D DTF 人员集成任务指挥系统
uOBMRI 2021-2022 年度报告(概要)
2022 年,我们自豪地庆祝了 uOBMRI 成立 10 周年。为了纪念这一里程碑式的成就,该研究所于 12 月 9 日星期五在渥太华会议和活动中心举办了纪念研究日。为了结束研究计划,该研究所举行了一场公众招待会,欢迎来自我们研究界和公众的 390 多名参与者。为了纪念这一里程碑式的成就,我们分享了一个时间表来回顾该研究所十年来取得的一些有影响力的时刻。

Alpha Mesh Swc:根据脑细胞骨架描述自动生成稳健的表面网格
图 1:(a) SWC 文件的说明性示例(不是真实细胞)。从左到右,各列分别表示节点索引、神经元区室类型、x、y、z 坐标、半径和父节点索引。例如,第二个节点表示位于 [0, 0, 8] 处半径为 2 µm 的顶端树突(类型 4)部分。它连接到其父节点(第一个节点)。如果父索引为 -1,则当前节点为根节点。(b) (a) 中 SWC 文件定义的神经元骨架的可视化表示。红色 ⊗ 符号表示体细胞节点,神经突节点用红色 + 表示。长度为 l 1 , . . . , l 4 的蓝线绘制了神经元骨架。虚线以 3D 形式说明了神经元的形态。(c) 可用于连接两个连续节点的圆锥

石墨烯利用容量来储存能量
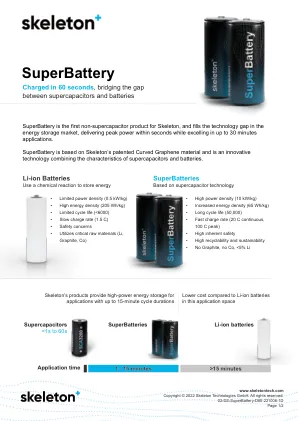
Skeleton 提供首批使用石墨烯的商业化技术之一,石墨烯是一种突破性的诺贝尔奖获奖材料。这家爱沙尼亚公司开发、制造和销售基于专利先进材料和设计的超级电容器储能电池、模块和系统。其知识产权组合旨在保护公司整个价值链上的技术,包括开发、生产和销售。知识产权和商业战略同步发展,首先是建立在保护以石墨烯为中心的核心技术的平台,重点是首先保护具有最佳商业潜力的发明。Skeleton 的员工接受交叉培训,因此每个人都了解并掌握公司的知识产权战略,并熟悉它与研发战略的关系。

为净零未来提供电网动力。
1. 此性能指的是使用寿命开始的条件。请联系 Skeleton Technologies 销售团队,以更好地了解使用寿命结束的性能和最佳设计。使用窗口 Vrated-Vrated/2 计算放电脉冲的功率,以获得最佳使用寿命,并且根据使用情况,可以选择较低的电压。2. 由于最大电压为 1500V,能量未最大化,但使用寿命大大提高
3D数字技术在雕塑创作中的应用研究
固定创造性流是传统雕塑创作形式的特征之一,这是不可互换的。在第一步中,雕塑骨骼是雕塑的核心形式,应根据雕塑的整体形状空间来构建骨架的大小和动态电位。它的构造是雕塑创作序列中的主要链接。建造骨骼的材料主要是木材和金属材料,过程缓慢而繁琐。尤其是,大型雕塑作品的骨骼的建造不亚于建筑物的框架。如果后生产过程中存在问题,则必须在及时甚至重新制作中进行调整,因此骨骼的构造是雕塑创作中最重要的第一步。第二步,掌握模制物体的势能和整体形状是骨架结构后进行的一部分,它要求创建者在一定时间段内显示在形状成型过程中符合创建标准的对象,并塑造,并塑造并雕刻其详细信息;第三步,在将雕塑图像模制在核心骨架上之后,应将其翻转并通过转弯技术进行模制,最后转换为硬材料雕塑。在传统的雕塑生产过程中,每个过程都起着至关重要的作用,并且生产序列是固定和不可逆转的。如果逆转生产过程,则最终工作将不会以最初的创建意图显示。
诺斯罗普·格鲁曼公司论文清单reference@huntington.org
机身驾驶舱罩组件,CV-25248,1934 机身底部罩,CV-25225,1934 固定设备,CV-25400,1934 柔性枪架安装,CV-25505,1932 动力装置燃油系统安装,CV-25325,1932 机身组装,完整,CV-25200,1934 机身骨架组件,前部,CV-25227,1933 机身骨架组件,后部,CV-25228,1933 下部面板骨架组件,CV-25015,1932 无线电罗盘环安装,CV-24560,1931 稳定器和升降舵骨架,CV-25103, 1934 尾轮安装,机身可锁定,CV-25660,1933 上部面板骨架组装,CV-25016,1934 有效载荷安装,CV-25500,1934 机翼竖立,CV-25000,1933 O3U-3 / SU-2 / SU-3,蓝图,固定枪安装,机身中央部分,Chance Vought 公司,CV-26520,1932 O3U-3 / XO4U,蓝图,回收系统安装,机身