XiaoMi-AI文件搜索系统
World File Search SystemSlam

ACKR2缺陷型NK细胞增强CCR2的表达增加了肿瘤细胞治疗疗效
摘要:本文提出了一种基于视觉的障碍物避免自动自动驾驶汽车,可以使用单个RGB-D摄像头在仅CPU的设备上运行。该方法由两个步骤组成:视觉感知和路径计划。视觉感知部分使用Orbslam 3增强了使用光流量来估计汽车的姿势并从场景中提取丰富的纹理信息。在路径计划阶段中,提出的方法采用一种方法,将控制lyapunov函数和控制屏障功能结合起来,形式是二次程序(CLF-CBF-QP)以及障碍物形状重建过程(SRP)来计划安全稳定的轨迹。为了验证提出方法的性能和鲁棒性,使用凉亭模拟环境在各种复杂的室内环境中使用汽车进行了模拟实验。提出的方法可以有效地避免在场景中遇到障碍。所提出的算法在实现多个模拟场景的更稳定和较短的轨迹方面优于基准算法。
比较用于Carlike车辆的超声波和激光传感器的大满贯算法
同时本地化和映射(SLAM)是构建环境一致地图的过程,自动移动机器人行驶时,同时确定其在未知环境中未知位置中的地图上的位置。SLAM用于诸如自动驾驶汽车系统,灾后恢复以及生命检测,矿山或凹痕地图提取等技术。SLAM旨在改善当今的自动驾驶机器人技术,并在将来建立近乎完美的自主机器人技术。有了这个想法,研究人员对大满贯问题的兴趣及其研究越来越持续。以这种方式,SLAM使结果更接近现实。自主机器人最重要的标准之一是它感知其环境的能力。放置在机器人上的传感器将环境条件信息转换为适用于机器人处理的信号。适当的传感器选择非常重要,因为它影响了向机器人提供的环境条件信息的质量和数量。这项研究旨在确定SLAM中使用的传感器技术及其对SLAM问题解决方案的贡献。在这项研究中,使用单个传感器在特定环境中获取数据。索引项 - 自主,本地化,映射,机器人,传感器。

Adaptslam:通过不确定性最小化的资源限制,边缘辅助自适应大满贯
摘要 - 越来越多地提出了用于减少运行同时本地化和映射(SLAM)算法的移动设备的资源消耗的解决方案,其中大多数边缘辅助的SLAM系统假设移动设备之间的通信资源和边缘服务器之间的通信资源是无限制的,或者依靠HEURISTIC,或者依靠Heursistical来选择Edge的信息来传输Edge de Edge to the Edge the Edge the Edge the Edge。本文介绍了Adaptslam,这是一种边缘辅助的视觉(V)和Visual惯性(VI)SLAM系统,该系统适应了可用的通信和计算措施,基于我们开发的理论基础,我们开发了用于在移动设备中构建最佳本地和全球映射的关键框架(代表性框架)的子集(代表性框架)的子集(代表性框架)。我们实施了Adaptslam,以与最先进的开源VI-SLAM ORB-SLAM3框架合作,并证明,在受限的网络带宽下,将跟踪误差降低了62%,与最佳的基线方法相比。索引项 - 中等定位和映射,边缘计算,不确定性定量和最小化
对手在道路上:使用不明显的对抗补丁
视觉同时定位和映射(VSLAM)在众多新兴应用中起关键作用,其中包括自动驾驶和机器人导航。它主要利用图像传感器捕获的连续帧来进行定位并构建高清图。但是,现有的方法主要集中于构建可靠和准确的VSLAM系统,而几乎没有研究现有VSLAM系统的脆弱性。为了填补空白,我们引入了AOR(dversary是R oad)攻击,该攻击可以有效地改变定位和映射结果,而无需合法用户检测到广泛使用的VSLAM系统的结果。为此,我们对现有的VSLAM系统进行了深入研究,发现这些系统对环境质量变化非常敏感。在这种见解的基础上,我们设计了一种新颖的对抗斑块生成机制,该机制可以产生不明显的对抗斑块来攻击现有的VSLAM系统。我们广泛评估了对行业级车辆,机器人平台和四个著名的开源数据集的AOR攻击的有效性。评估结果表明,AOR攻击可以有效地攻击现有的VSLAM系统并引入极高的定位错误(高达713%)。为了减轻此攻击,我们还设计了一个重要的防御模块,以同时检测异常的环境纹理分布并支持可靠的VS-LAM。我们的防御模块轻巧,有可能应用于现有的VSLAM系统。
自动化车道变更行为的行为预测和基于SLAM技术的环境感知
除了环境感知传感器(例如摄像机,雷达等)。在自动驾驶系统中,人们可以感知车辆的外部环境,实际上,也有一个感知传感器在系统中默默地专用,即定位模块。本文探讨了自动驾驶汽车的自动巷改变行为预测和环境感知的猛烈(同时定位和映射)技术的应用。它讨论了传统定位方法的局限性,引入了大满贯技术,并将激光雷达的大满贯与视觉大满贯进行了比较。来自特斯拉,Waymo和Mobileye等公司的现实世界实例展示了AI驱动技术,传感器融合和在自动驾驶系统中的集成。随后,纸张研究了SLAM算法,传感器技术的细节,以及自动车道变化在驾驶安全性和效率方面的重要性。它突出显示了特斯拉对其自动驾驶系统的最新更新,该系统结合了使用SLAM技术的自动车道更改功能。本文结论是强调SLAM在实现自动驾驶汽车的准确环境感知,定位和决策中的关键作用,最终增强了安全性和驾驶经验。

无人机辅助的Visual Slam生成重建的3D场景图
摘要 - 空中机器人在各种应用中起着至关重要的作用,在各种应用中,机器人对环境的意识是基本需求。作为一种用例,在受GPS贬低的环境中的无人机需要配备不同的传感器(例如,视觉传感器),这些传感器在执行姿势估计和本地化时提供了可靠的传感结果。在本文中,针对了安装在无人机上的摄像头,重建室内环境的地图,以生成3D场景图,以进行高级表示。因此,建造并使用配备了配套计算机和RGB-D相机的空中机器人与作者提出的同时定位和映射(VSLAM)框架合适地集成在一起。在重建地图,各种结构元素(包括门和墙壁)的同时提高机器人的情境意识,上面标有印刷的信托标记,其中拓扑关系的词典被馈送到了系统中。VSLAM系统检测标记并重建室内区域的地图,并具有更高级别的语义实体,包括走廊和房间。另一个成就是生成基于多层视力的情境图,其中包含室内环境的增强分层表示。在这方面,将VSLAM集成到所采用的无人机中是本文为GPS污染环境提供端到端机器人应用程序的主要目标。为了显示系统的实用性,已经在具有不同结构布局的室内场景中进行了各种现实状况实验。评估表明,提议的无人机应用程序可以进行足够的W.R.T.地面真相数据及其基线。

by-slam:基于台面和语义信息提取的动态视觉大满贯系统
摘要:SLAM是一种至关重要的技术,用于实现无人车辆的自主导航和定位。传统的视觉同时本地化和映射算法建立在静态场景的假设上,从而忽略了动态目标在现实世界环境中的影响。来自动态目标的干扰可以显着降低系统的定位精度,甚至导致跟踪故障。为了解决这些问题,我们提出了一个名为S-Slam的动态视觉大满贯系统,该系统基于“同样和语义信息提取”。最初,引入了词汇描述符来描述定向的快速特征点,从而提高了特征点匹配的精度和速度。随后,fasternet替换了Yolov8的骨干网络以加快语义信息提取。通过使用DBSCAN聚类对象检测的结果,获得了更精致的语义掩码。最后,通过利用语义面膜和表现约束,可以辨别和消除动态特征点,从而仅利用仅利用静态特征点进行姿势估计,并构建了不包括动态目标的密集3D地图。在TUM RGB-D数据集和现实世界情景上进行了实验评估,并证明了拟议算法在滤除场景中的动态目标方面的有效性。与Orb-Slam3相比,TUM RGB-D数据集的本地化准确性提高了95.53%。针对经典动态大满贯系统的比较分析进一步证实了通过lam的定位准确性,地图可读性和鲁棒性的提高。

seg-slam:动态室内RGB-D视觉大满贯整合几何和基于Yolov5的语义信息
摘要:同时定位和映射(SLAM)对于移动机器人技术至关重要。大多数vi-sual SLAM系统都假定环境是静态的。但是,在现实生活中,有许多动态对象,会影响这些系统的准确性和鲁棒性。为了改善视觉大满贯系统的表现,这项研究提出了基于定向的快速和旋转简短(ORB)-Slam3框架的动态视觉大满贯(SEG-SLAM)系统,您只能看一次(YOLO)V5深学习方法。首先,基于ORB-SLAM3框架,Yolov5深学习方法用于构建用于目标检测和语义分割的融合模块。此模块可以有效地识别并提取明显和潜在动态对象的先验信息。第二,使用先前的信息,深度信息和表现几何方法为不同的动态对象开发了差异化的动态特征拒绝策略。因此,提高了SEG-SLAM系统的定位和映射准确性。最后,拒绝结果与深度信息融合在一起,并使用点云库构建了无动态对象的静态密集映射。使用公共TUM数据集和现实世界情景评估SEG-SLAM系统。所提出的方法比当前动态视觉大满贯算法更准确,更健壮。

SLAM-RAMU:3D LIDAR-IMU终生大满贯,并具有重新定位和自主地图更新,以进行准确可靠的导航
设计/方法论/方法:本研究介绍了Slam-Ramu,这是一个终生的大满贯系统,通过提供精确,一致的重新定位和自主地图更新来解决这些挑战。在映射过程中,使用迭代误差状态kalman滤镜获得局部探测器,而后端环检测和全局姿势图优化用于准确的轨迹校正。此外,还合并了一个快速点云分割模块,以牢固地区分环境中的地板,墙壁和屋顶。然后使用分段点云来生成2.5D网格图,特别强调地板检测以滤波先前的映射并消除动态伪像。在定位过程中,设计了一种初始姿势比对方法,该方法将2D分支和结合搜索与3D迭代最接近点(ICP)注册相结合。此方法即使在具有相似特征的场景中也可以确保高精度。随后,使用先前地图上的分段点云执行扫描到地图注册。该系统还包括一个地图更新模块,该模块考虑了历史点云分割结果。它有选择地合并或排除新的点云数据,以确保地图中真实环境的一致反射。
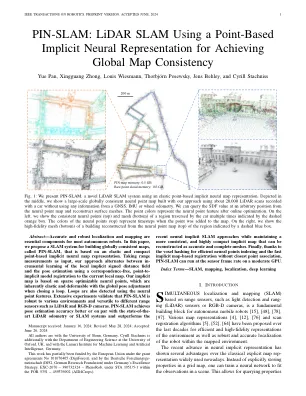
PIN-SLAM:LIDAR使用基于点的隐式神经表示来实现全球地图一致性
图1:我们使用基于弹性点的隐式神经图表示,这是一种新型的LIDAR SLAM系统。在中间描绘的是,我们使用大约20,000个带有汽车记录的LiDAR扫描的大规模全球一致的神经点图,而无需使用GNSS,IMU或车轮频能计的任何信息。我们可以从神经点图和重建表面网格的任意位置查询SDF值。点颜色表示在线优化后的神经点功能。在左侧,我们显示了一致的神经点(顶部)和网眼(底部),该区域多次由沿线橙色盒子指示的汽车穿过。当添加到地图中时,神经点(顶部)的颜色表示时间步。在右侧,我们显示了从一个用虚线的蓝色盒子指示的区域的神经点图(顶部)重建的建筑物的高层网格(底部)。