XiaoMi-AI文件搜索系统
World File Search SystemSlam

tc-ltio:激光雷达和视觉进程降解环境的紧密耦合激光偶尔惯性进程
自动移动机器人在交付,制造,耕作,采矿和太空探索的自动化中起着重要作用。尽管这些机器人在传统上依靠其与GNSS/INS系统的本地化[1],但在室内,室内,屋顶或茂密植被的区域,在发生信号损失的情况下,会出现挑战。为了克服这一限制,已经提出了同时定位和映射(SLAM)[2]方法。猛击通常将其分为光检测和范围(LIDAR)大满贯和视觉猛击,具体取决于所用的主要传感器。LIDAR SLAM在涉及敏捷运动和复杂结构化环境的场景中具有很高的精度和鲁棒性,这是由于其能力直接使用多个射线直接测量对象和传感器之间的距离[3]。但是,由于LiDar SLAM通过匹配每种结构扫描来执行定位,LIDAR的大满贯可以在无结构的场景中退化,例如隧道,庞大的平面和走廊[4]。另一方面,视觉猛击,利用RGB图像的纹理信息可以在无结构环境中起作用,因为它依赖基于纹理的特征,即使在缺乏明确的结构元素的场景中,也可以提取这些特征[5]。然而,视觉大满贯的规模估计有弱点,并且可以在照明条件下快速变化。为了解决LiDAR和Visual Slam的局限性,已经提出了各种LiDAR视觉大满贯方法,这些方法同时整合了LiDar和Visual Sensor的信息[6-8]。这些方法可以有效地处理结构和,因为这些方法大多数都依赖于松散耦合的方式(系统间融合)[6,7],这两个系统中的故障都会导致总体猛击失败。为了解决松散耦合方式的弱点,已经提出了紧密耦合的方法(功能间融合)[8]。
neurotecnología:interfaz cerebro-计算机yprotección...
室内定位是一个尚未有效,准确解决的问题。在室外最有效的解决方案是全球位置系统(GPS),但由于信号的减弱,无法在室内使用它,因此已经研究了其他解决方案。这些方法可用于定义盲人,旅游或自主机器人导航的指导的地图。在本文中,提出了强大的障碍检测和映射系统的研究,设计,实施和评估。因此,它可用于警报近对象的存在,并避免在室内导航中发生碰撞。该系统基于飞行时间(TOF)摄像头和单板计算机(SBC),例如Raspberry Pi或Nvidia Jetson Nano。为了评估系统,进行了一些实际的实验。这种系统可以集成在轮椅上,并帮助残障人士在室内移动或从室内环境中获取数据并在2D或3D图像中重新创建它。

Romero-Godoy,d。; Sánchez-Rodríguez,d。; Alonso-Gonzá-Lez,I。; Delgado-Rajó,F。基于SLAM
文章信息摘要目的:本研究的目的是分析和评估影响越南海鲜企业国际供应链合作的因素。理论框架:国际业务环境中的运营与高风险有关,因此供应链中的合作有助于提高管理灵活性。另一方面,对资源依赖,资源共享和信息共享策略的理论产生影响会影响供应链合作伙伴之间的质量和合作水平。设计/方法/方法:为了实现这项研究的目的,进行了与供应链和供应链合作有关的文献调查,并在海鲜行业的327个合作伙伴中进行了经验分析,并使用Cronbach的Alpha分析,探索性因素分析(EFA)(EFA)和线性回归分析(RAILEAR RENSESION SAMISSICTION)进行了分析的结果(RA)。调查结果:研究结果证实,有六个主要因素直接影响越南海鲜企业的国际供应链合作,包括:(1)信托; (2)力量; (3)距离; (4)政府政策; (5)合作策略和(6)信息共享。研究/实践和社会含义:政府,VASEP和企业将实施令人鼓舞的政策和简化出口法规,因此,将在全面的未来研究方向的帮助下促进有关国际供应链合作的知识。
![arxiv:2403.17346v2 [CS.CV] 2 Sep 2024](/simg/9\9944fb79975bd27f5343cf3e1c65012cdfd8fc49.webp)
arxiv:2403.17346v2 [CS.CV] 2 Sep 2024
用于相机轨迹估计,同时定位和映射(SLAM)[9]已被广泛用于机器人技术中。但是,在我们的背景下,传统的大满贯面临两个关键挑战。首先,SLAM假设一个静态环境,而我们的视频包含移动人体,这减少了估计值的认可。其次,单眼猛击只能恢复摄像头轨迹,最多可恢复到库尺度。为代表公制世界框架中的相机运动,我们需要估算一个缩放因素。最近的研究建议从观察到的人类运动中推断摄像机运动的规模[22,95]。特别是在猛击之后,这些方法共同优化了人类的姿势和摄像头尺度,因此人的位移与学习的运动模型相匹配。但是,由于运动模型是从Studio MoCap数据中学到的,因此预测的位移不会推广到现实世界中的复杂性。因此,他们难以恢复复杂而远程的轨迹。

hyungtae lim
• RSS Pioneers 2024 (Out of 202 candidates, only 30 researchers were selected) • 1st prize again in HILTI SLAM Challenge'24 in IEEE ICRA • 20+ IROS, ICRA, RA-L, RSS, IJRR papers during grad school (12 first-author papers) • 2022 IEEE RA-L Best Paper Award (among 1,100 papers, only 5 papers are selected) • 1st prize在63个国际团队中,在IEEE ICRA中的Hilti Slam挑战23中•CES'23创新奖通过Tech。有关移动机器人大满贯的转移(与Hills Robotics合作)•Univ的访问学者。Bonn, Germany (advisor: Prof. Cyrill Stachniss) • In 2022, serve as a SLAM part outside expert, CTO division of LG Electronics, Republic of Korea • 2nd cash prize in HILTI SLAM Challenge'22 in IEEE ICRA (in total, 4th place) • Research intern of vision/deep learning team of NAVER LABS, Republic of Korea • 1st prize in Hitachi-LG Data Storage LiDAR application competition,大韩民国
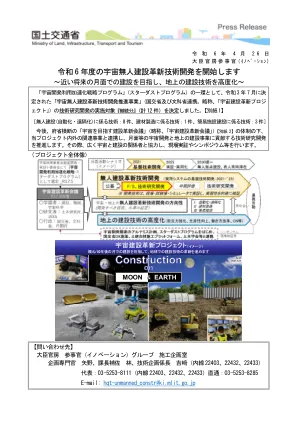
我们将于2024财年开始开发创新型太空无人建造技术。
[实施图像] 为了控制工程机械实现无人施工,必须获取机械的准确位置信息。为了在没有定位卫星系统的月球环境下获取位置信息,我们旨在通过整合利用环境信息的LiDAR-SLAM技术和利用人工特征的地标SLAM技术(混合SLAM),开发能够适应月球表面等特殊环境的自动驾驶技术。


基于同步定位和地图绘制的自主导航系统
摘要 —本文介绍了基于同步定位和地图构建 (SLAM) 的自主导航系统的开发。本研究的动机是找到一种自主导航室内空间的解决方案。室内导航具有挑战性,因为它可以永远发展。解决这个问题对于许多服务来说都是必要的,例如清洁、医疗行业和制造业。本文的重点是描述为这个提议的自主系统开发的基于 SLAM 的软件架构。评估了该系统面向智能轮椅的潜在应用。当前的室内导航解决方案需要某种引导线,例如地板上的黑线。有了这个提议的解决方案,室内不需要翻新来适应这个解决方案。此应用程序的源代码已开源,因此可以重新用于类似的应用程序。此外,预计这个开源项目将由广泛的开源社区在其当前状态的基础上得到改进。索引术语 —深度学习、导航、物体避让、SLAM


基于无人机的 GPS 拒绝环境中目标跟踪的协作 Visual-SLAM 系统:以目标为中心的方法
摘要:使用无人机 (UAV) 自主跟踪动态目标是一个具有挑战性的问题,在许多场景中都有实际应用。在这种情况下,必须解决的一个基本方面与空中机器人的位置估计和控制飞行编队的目标有关。对于非合作目标,必须使用机载传感器估计其位置。此外,对于估计无人机的位置,全球位置信息可能并不总是可用的(GPS 拒绝环境)。这项工作提出了一种基于视觉的合作 SLAM(同步定位和地图绘制)系统,该系统允许一组空中机器人自主跟踪在 GPS 拒绝环境中自由移动的非合作目标。这项工作的贡献之一是提出并研究使用以目标为中心的 SLAM 配置来解决与众所周知的以世界为中心和以机器人为中心的 SLAM 配置不同的估计问题。从这个意义上说,所提出的方法得到了从广泛的非线性可观测性分析中获得的理论结果的支持。此外,还提出了一种控制系统,用于保持相对于目标的稳定无人机飞行编队。在这种情况下,使用 Lyapunov 理论证明了控制律的稳定性。通过采用大量计算机模拟,所提出的系统显示出可能优于其他相关方法。