XiaoMi-AI文件搜索系统
World File Search SystemSwarm
蜂群开始
此次任务的主要有效载荷 NEONSAT-1 是一颗地球观测卫星,配备高分辨率光学相机,旨在通过将其图像与人工智能配对来监测朝鲜半岛的自然灾害。NEONSAT-1 是 SaTReC 和韩国顶尖科技大学 KAIST 在 NEONSAT 计划下开发的第一颗卫星,30 多年前,该大学开发并运营了韩国第一颗卫星 KITSAT-1。其他 NEONSAT 卫星计划于 2026 年和 2027 年发射,以构建 NEONSAT 星座。该计划是韩国多个学术、工业和研究机构的合作,其中包括 KAIST 的 SaTReC,它负责领导该计划的系统设计和工程;Satrec Initiative,一家韩国卫星制造商,已成功开发了七颗用于低地球轨道的遥感卫星;以及韩国航空航天研究院 (KARI),它负责管理 NEONSAT 计划的任务地面部分和技术监督。 NEONSAT 由韩国政府科学和信息通信技术部 (MSIT) 资助。
群体与群体无人机系统的多目标跟踪
估计此次信息收集的公共报告负担平均为每份回应 1 小时,包括审查说明、搜索现有数据源、收集和维护所需数据以及完成和审查信息收集的时间。请将关于此负担估计或本次信息收集任何其他方面的评论(包括减轻负担的建议)发送至国防部华盛顿总部服务处信息行动和报告局 (0704-0188),地址:1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302。受访者应注意,尽管法律有任何其他规定,但如果信息收集未显示当前有效的 OMB 控制编号,则任何人均不会因未遵守信息收集而受到任何处罚。请不要将您的表格寄回上述地址。1. 报告日期(日-月-年)2. 报告类型 3. 涵盖日期(从 - 到)

一个用于集成 Swarm 开发的框架...
过去二十年来,人们对群体技术的兴趣日益浓厚。这在很大程度上可以归因于无人系统技术的动态领域,该领域在政府和私营部门都得到了迅速发展。无人系统技术已从物理危险、高空、长航时军事任务扩展到农业、采矿、搜索和救援以及环境研究民用和商业任务(USDOD 2013)。无人系统比有人系统具有许多优势。就 UAS 而言,它们受人为因素(如机组人员休息、G 耐受性、环境条件和舒适度)的限制较少。无人系统可以是消耗性的,并且比有人系统具有更低的生命周期成本;然而,系统可靠性低 (Finn 2010)、技术准备程度低、物流足迹大以及具有讽刺意味的人力需求增加,使得成本优势被边缘化。同样,无人系统的测试和评估困难以及在满足运营效率和适用性要求方面的不良记录在历史上也导致了更高的系统生命周期成本。
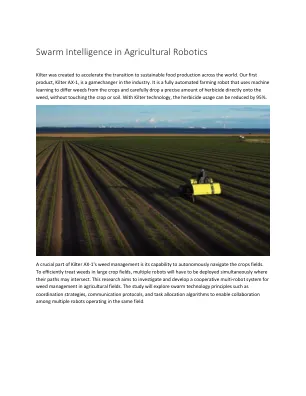
农业机器人技术中的群体智能
Kilter AX-1的杂草管理的关键部分是其自主浏览农作物场的能力。要在大型农田中有效治疗杂草,必须同时部署多个机器人的路径可能相交。这项研究旨在调查和开发一种在农业领域的杂草管理的合作多机器人系统。该研究将探讨群体技术原则,例如协调策略,沟通协议和任务分配算法,以实现在同一领域运行的多个机器人之间的协作。

多智能体 Swarm 实现... - G2NET
多智能体多信使环境低频感知的群体实现 F.Bonsignorio 我们正在开发一种可重复、可衡量的方法来部署由空中无人机、移动地面机器人、水下滑翔机、ROV 和放置在地面或海底的固定或移动传感器组成的复杂自适应网络。该方法利用 Voronoi 图、由多智能体信念空间规划方法框架构建的不同种类化学和非化学传感器的多传感器融合。我们的项目整合了 FER 的 AIFORS 实验室、萨格勒布大学、Heron@CNR 联合实验室和华沙大学的资源,并伺机寻求国家、欧洲和国际层面的资金,旨在将一种新的自组织传感器网络概念与在开放式环境中行动的机器人群相结合。从环境中提取信息和绘制环境地图被组织为两个新兴的并发过程。当各个群体成员随机探索环境时,网络会创建节点。群体的自组织和成长过程由基于群体成员之间相互信息函数的适应度函数控制。联网传感器会根据已部署的传感器点本地计算出的更高熵度量,更密集地释放到环境中。当适应度函数(表示群体成员之间的相互信息)达到最大值时,就会创建节点。

Swarm DroneS - Raksha Anirveda
2023 年第一季度对印度来说是多事之秋,充满希望,为 Amrit Kaal 之旅的进一步进展奠定了基础。尽管面临诸多挑战,但印度对应对挑战并实现 2047 年目标的能力日益增强的信心令人瞩目。现在是印度更积极地在全球舞台上发挥重要角色的时候了。这是印度时刻的早期一瞥,还是已经到来了?在某种程度上,这一时刻已经到来,因为世界承认印度在几乎所有领域的存在——从经济到地缘政治,从军事到太空。自信和自力更生的印度必须协同所有努力,确保其在全球舞台上前进的持久成功。印度能否长期保持这种势头?这将是值得关注的。为了取得持久的成功,印度需要专注于研发 (R&D),这可以帮助它通过增值出口和技术进步成为经济强国。现在是时候让印度的创新本能更加精妙,因为它可以改变游戏规则。该国的研发工作应利用其丰富的人力资源和均衡的劳动力资本矩阵。关键改革和印度制造计划振兴了国防部门,2022-23 财年,在竞争激烈的全球国防市场上,军事硬件出口增长了 10 倍,达到 1600 亿卢比的历史新高。类似
群体智能:新工具...
自然界中的动物群体能够适应其环境的动态变化,并通过合作解决对其生存至关重要的问题。只有通过与群体中其他成员和环境的局部互动,它们才能比单个个体更有效地实现共同目标。这种由多种互动产生的解决问题的行为被称为群体智能。自然界群体行为的数学模型最初是为了解决优化问题而提出的。然而,这种分散的方法可以成为各种应用的宝贵工具,其中新兴的全局模式代表了手头任务的解决方案。基于群体智能解决困难计算问题的方法已在实验中得到证明并在文献中得到报道。然而,目前尚不存在一个可以促进其设计的通用框架。

莎莎:群算法模拟器
摘要 - 越来越多地将Swarm算法作为解决各个领域的分布式,复杂问题的潜在解决方案。但是,由于缺乏健壮和灵活的测试床,开发和测试这些算法仍然具有挑战性。此外,有效地调整群体算法的参数以适合特定情况是一个重要的挑战。本文纸提出了萨尔萨纸,这是一个综合且可扩展的框架,旨在简化群体算法的开发和评估 - 旨在易于使用。我们的测试床使用户能够定义自定义的群算法,无人机类型,检测目标和代理交互过程。它还允许动态参数更新,提供即时反馈以优化算法performence。此外,测试台支持用户限制的数据和自动数据收集,以确保用户可以充分地收集相关的数据。总的来说,莎莎莎莎通过减少设置和测试群算法所需的时间和精力来提高研究效率。索引术语 - 空军,空中群,多机构系统,自组织系统,仿真,测试床

进化群 - Orbilu
群体已成为空间和航空应用程序的有趣替代方案。其中一些应用,例如小行星观察,护卫队和反无人机系统,依赖于围绕中心兴趣点的稳定地层。但是,使用不同数量的机器人和广泛的初始条件的存在有助于使其成为一个具有挑战性的问题。我们在这项研究工作中提出了一种自我组织的新方法,以使成员的运动仅取决于他们从各自无线电信标获得的相对位置(范围和轴承)。提出了一种基于进化算法的优化方法来计算最佳群的参数,例如速度和吸引/驱动力,以在不同的初始条件和失败率下实现强大的地层。实验是使用六个案例研究的现实模拟进行的,其中包括三个,五个,十,十五,二十和三十个机器人。在420个场景上测试了最有价值的配置,这表明我们的建议很健壮,因为它始终达到了所需的圆形形成。最后,我们使用了实际的E-Puck2机器人来验证群体围绕中心点的自我组织的能力以及对机器人故障的弹性,并在所有实验中获得了成功的圆形形成。

幸福与健康粒子群优化
粒子群优化 (PSO) 是一种流行且广泛使用的优化算法,用于解决复杂问题。它以简单和易于实施而闻名。人工鸟在搜索空间中移动以找到最佳解决方案。尽管文献中提出了许多 PSO 算法,但 PSO 算法中尚未探索幸福和健康等概念。本文基于这一研究空白。幸福和健康粒子群优化 (HaHePSO) 算法是通过将幸福和健康概念纳入粒子群优化算法而创建的。HaHePSO 算法中的每个粒子都与幸福和健康变量相关联。PSO 算法中人工鸟的移动基于适应度值。在 HaHePSO 算法中,人工鸟的移动取决于幸福、健康和适应度值。在 PSO 算法中,人工鸟朝着局部最佳和全局最佳适应值的方向移动。这一思想在 HaHePSO 算法中得到了扩展,其中人工鸟朝着幸福感、健康和适应值的局部最佳和全局最佳方向移动。与 PSO 算法相比,本文提出的 HaHePSO 算法占用更多空间并需要额外计算。这是因为现在每个粒子都有与之相关的幸福感和健康变量,并且搜索空间中的移动由适应度、幸福感和健康值引导。