XiaoMi-AI文件搜索系统
World File Search SystemSwarm
印度的群无人机:不断增长的能力
7 ANI, Indian Navy Develops Anti-Swarm Drones To Safeguard From Enemy Attacks, NDTV, October 05, 2023, https://www.ndtv.com/india-news/indian-navy-develops-indigenous-navigation-system-anti-swarm-drones-to-safeguard-from- enemy-attacks-4451318 .于2024年5月12日访问。

类别、量子计算和群体机器人
摘要:机器人群体是人工集体智能的例子,具有简单的个体自主行为和新兴的群体效应,可以完成甚至复杂的任务。机器人群体开发的建模方法是该研究领域的主要挑战之一。在这里,我们提出了一个机器人实例化的理论框架和一个定量的算例。为了建立一个通用模型,我们首先在范畴论的启发下,勾勒出群体的图解分类,将理想群体与现有实现联系起来。然后,我们提出了一个矩阵表示来关联群体中的局部和全局行为,对角子矩阵描述单个特征,非对角子矩阵作为成对的交互项。因此,我们尝试塑造这种交互项的结构,使用量子计算语言和工具对玩具模型进行定量模拟。我们选择量子计算是因为它的计算效率。该案例研究可以阐明量子计算在群体机器人领域的潜力,为逐步丰富和完善留下空间。


基于高斯的定向粒子群优化
粒子群优化 (PSO) 是一种迭代搜索方法,它使用随机步长将一组候选解决方案围绕搜索空间移动到已知的最佳全局和局部解决方案。在实际应用中,PSO 通常可以加速优化,因为梯度不可用且函数评估成本高昂。然而,传统的 PSO 算法忽略了从单个粒子的观察中可以获得的目标函数的潜在知识。因此,我们借鉴了贝叶斯优化的概念,并引入了目标函数的随机代理模型。也就是说,我们根据目标函数的过去评估拟合高斯过程,预测其形状,然后根据它调整粒子运动。我们的计算实验表明,PSO 的基线实现(即 SPSO2011)表现优异。此外,与最先进的代理辅助进化算法相比,我们在几个流行的基准函数上实现了显着的性能改进。总体而言,我们发现我们的算法实现了探索性和利用行为的理想特性。
太阳能家庭系统和群电气化
TEMS,例如PV,电池容量和负载特性。盈余能量量随着PV容量的增加而增加,但是一旦满足每日存储需求,它就不会随着电池容量的增加而减小。低于该限制负载特性会影响盈余能量的量。研究表明,剩余能量并不总是存在,尤其是对于PV较低且电池容量较高的系统。这项工作表明了群体电气化中的能源如何在很大程度上取决于能源共享策略和控制环境。如果设计不当,它可以减少某些家庭的能源通道。肯尼亚和挪威病例之间的比较研究说明了这种影响,并强调了季节性PV变化对能源共享有效性的影响。农村玻利维亚的一项研究强调了等值能量分布和社区参与群蜂窝电气化和能源共享策略的重要性。虽然由于阳光降低而导致冬季时面临限制,但其负载曲线的差异为有效的能源共享提供了机会。尽管这些变化是有益能源共享的主要因素,但这项研究突出了PV系统准确建模的优势,尤其是结合了PV面板方向,以更好地了解能源共享的真正潜力。使用现实的PV输入数据模拟的挪威机舱田地,仅在群体电气化框架内通过太阳能PV提高电力访问的巨大潜力。

在群算法中处理离群值:评论
抽象的群体优化算法受到生物群的集体行为的启发,是一种有前途的工具,用于解决优化传统方法通常无效的复杂系统的问题。但是,离群值的问题可能会严重影响找到最佳解决方案的过程。因此,研究群算法中检测和处理异常值(例如粒子群优化(PSO))的方法是一项紧急任务,具有提高这些算法在各种实际应用中的效率和可靠性的巨大潜力,例如无人机控制系统,金融系统,环境控制和建模系统。本文涉及群体优化算法(例如PSO)中离群值的问题。提供了现有的管理异常值的方法,包括自适应方法,使用群拓扑,混合算法等的方法。分析了每种方法的优点和缺点。特别关注新的有前途的领域,例如神经网络和增强学习的组合,以开发更有效和适应性的群算法。本文针对优化领域的研究人员和从业人员,他们有兴趣提高群体算法的效率和可靠性。
将船只机器人技术引入监测和
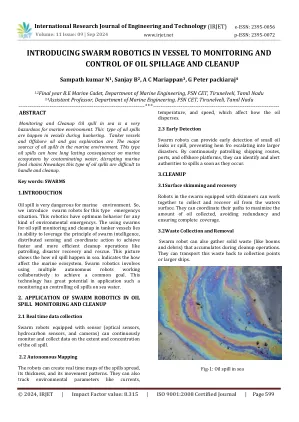
漏油对于海洋环境非常危险。因此,我们为这种类型的紧急情况介绍了群体机器人。此机器人技术对于任何形式的环境紧急情况具有最佳行为。油轮船中的使用群进行漏油监测和清理,有能力利用群体智能,分布式感应和协调行动的原则,以实现更快,更有效的清理操作,例如巡逻,灾难恢复和救援。这张照片显示了海上漏油事件的发生方式。表示海洋生态系统的影响。群机器人技术涉及使用多个自主机器人协同工作以实现共同目标。这项技术在应用中具有巨大的潜力,例如监测控制油在海水上的漏油。
可持续仓库自动化中的群机器人
摘要。根据人口普查和统计局的统计数据,2010年至2014年之间物流行业的90%以上的工作来自货运和存储服务。随着行业4.0及其相关的新兴技术的出现(例如云计算,物联网,自动机器人等。),建议使用智能机器人仓库管理系统。这些创新通过使自主移动机器人从人对商品过渡到商品对人,从而改变了仓库中的采摘程序和推出程序。一组机器人合作,通过将实用结构和行为汇总到类似于鸟类,鱼类或蜂群中的实用结构和行为来解决群体机器人的问题。但是,向工业应用的过渡尚未完成令人满意的水平。文献中缺乏有关利用群算法的现实群体应用的知识。通常,使用了群算法组件(或我们称之为基本的蜂群行为)。因此,本文讨论了该技术可用的机会以及其使用可能带来的挑战。最后,已经提出了一些可能的解决方案,以帮助应对可持续仓库自动化中确定的挑战。

飞机配平粒子群优化分析
在本研究中,首先开发了 F-16 飞机全动力学的详细非线性模型,并用 MATLAB 编写了代码。该模型包括重力模型、可变大气参数、表格气动函数、推进模型、非线性控制面驱动模型和六自由度运动方程。然后开发了一种使用上述模型计算所有可能配平值的数值工具。该工具可以计算不同操作点的配平值。在开发的算法中,使用了粒子群优化 (PSO) 方法,这是一种在连续搜索空间上具有高收敛速度的元启发式方法。然后使用开发的模型围绕计算出的配平值进行模拟。模拟结果证实,基于 PSO 的配平算法可以高精度地找到所有配平值。引用本文:I. Gumusboga、A. Iftar,“粒子群优化飞机配平分析”《航空航天技术杂志》,第12,第2,第185-196,7 月2019.分段优化和配平分析

用于 CNN 的粒子群优化模糊积分 - ...
摘要 最近,使用卷积神经网络 (CNN) 解码人类脑电图 (EEG) 数据推动了脑机接口 (BCI) 中运动想象脑电图模式识别的最新技术。虽然已经使用多种 CNN 模型来对运动想象脑电图数据进行分类,但尚不清楚聚合异构 CNN 模型集合是否可以进一步提高分类性能。为了整合集成分类器的输出,本研究利用模糊积分和粒子群优化 (PSO) 来估计分配给分类器的最佳置信度水平。所提出的框架聚合了 CNN 分类器和模糊积分与 PSO,根据 BCI 使用场景,在各种 CNN 模型训练方案中实现运动想象脑电图数据的单次试验分类的稳健性能。这项概念验证研究证明了应用模糊融合技术增强基于 CNN 的 EEG 解码的可行性,并有利于 BCI 的实际应用。关键词:脑机接口 (BCI)、脑电图 (EEG)、卷积神经网络 (CNN)、模糊积分、运动想象 (MI)、粒子群优化 (PSO)。