XiaoMi-AI文件搜索系统
World File Search SystemTOF

先天性心脏的儿科患者的营养状况
背景:先天性心脏病(CHD)通常与营养不良和未能繁殖有关。目标:评估心脏手术后CHD儿童的营养状况和生长模式。患者和方法:包括以下冠心病:心室间隔缺陷(VSD),心房间隔缺陷(ASD),发育不良左心综合征(HLHS),法洛(TOF)四部曲(TOF)或大动脉(DTGA)的转化。所有患者均受过病史,检查,实验室检查,放射学发现和动脉氧饱和度的约束。结果:女性为47.1%。另外,有79.4%的丙糖酸冠状动脉chd和20.6%为氰基冠心病。与患者的体重,长度,BMI相比,氰基cyanotic患者的统计学显着差异。我们的研究发现,有7.4%的抗糖毒素病例和42.8%的氰基CHD病例患有严重的营养不良,1.9%的丙氨酸冠心病病例和35.7%的氰基chd病例患有中等营养不良的病例。从统计学上讲,关于丙糖chd和Cyanotic CHD,营养状况存在显着差异。在我们的研究中,有79.4%的人没有临床心力衰竭。我们的冠心病病例中约有13.2%的心力衰竭,4.4%的心力衰竭,2.9%的心力衰竭患有严重的心力衰竭。最常见的CHD是Arteriosus专利导管32.4%,较不常见的5.9%是心室室里5.9%。关键词:先天性心脏病,营养,儿童结论:冠心病儿童的营养不良是一个主要问题,因为与术前热量数据相比,这些儿童的营养不良率很高。

来自时间数据的空间图像:补充
本文档为“时间数据的空间图像”提供了补充信息。文档结构如下:第 I 节讨论了用于生成飞行时间图像和时间直方图的数值算法(数值正向模型);第 II 节解释了图像(逆)检索算法;第 III 节给出了额外的实验细节;第 IV 节讨论了结构相似性指数 (SSIM) 方面的重建图像质量,重点介绍了可能影响检索算法性能的因素;第 V 节证明了我们的成像方法可以扩展到单点射频天线;最后,第 VI 节给出了 ToF 模拟和 ANN 训练的伪代码。

基于计算机视觉方法的智能手机跟踪手动障碍
摘要。本文介绍了使用基于智能手机的计算机视觉技术来诊断手动障碍的经济高效,高效且可访问的解决方案的开发。它突出了使用TOF相机数据与RG数据和机器学习算法相结合的想法,以准确识别四肢和运动,这克服了传统运动识别方法的局限性,改善了康复和降低专业医疗设备的高成本。使用智能手机和先进的计算方法的无处不在,该研究提供了一种新的方法来提高运动障碍诊断的质量和可及性,为未来的研究和在临床实践中的研究和应用提供了有希望的方向。
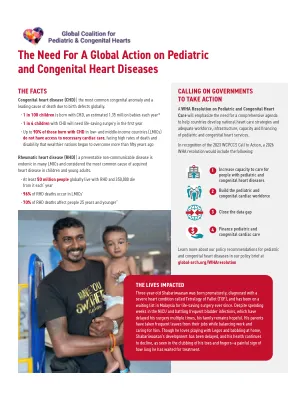
需要对小儿和先天性心脏病进行全球行动
生命受影响的三岁的Shabariwaasan过早出生,被诊断出患有严重的心脏病,称为Fallot(TOF)的心脏病,从那以后一直在马来西亚的候补名单上进行救生手术。尽管在NICU上花费了数周的时间,并与频繁的膀胱感染作斗争,这使他的手术延迟了多次,但他的家人仍然充满希望。他的父母在平衡工作和照顾他的同时,经常从工作中摆脱困境。尽管他喜欢与乐高积木玩耍并在家里狂欢,但Shabariwaasan的发展已被推迟,他的健康持续下降,正如他的脚趾和脚趾的俱乐部所见,这是他等待治疗多长时间的痛苦迹象。

在20-35 MEV范围内从7LI(P,N)反应中的中子产生峰值
基于7 li(p,n)的NPI CAS的QMN生成器,包括一个2毫米厚的锂靶(7 li或nat li Metal),然后是1厘米厚的碳板,以停止在通过目标后保留在束中的碳纤维板。靶标和平板是电隔离的,以允许通过撞击质子带来的电荷进行调查。由U-120m的回旋子加速并导向目标的质子束(请参见图。1)。质子能可以设置在20-35 MeV范围内。发电机的设计允许在辐照后提取锂靶(用于γ-测量)。40-50 ns的回旋射频(RF)复活周期允许中子光谱的流动时间(TOF)调查。可以在[4]中找到更多细节。
糖尿病管理,服务和用品
成人先天性心脏先天性心脏病 - 一般信息(CD-11.1)先天性心脏病成像指示(CD-11.2)ASD - atrial间隔缺损(CD-11.2.1.2.1)异常肺静脉连接(CD-11.2.2) Endocardial Cushion Defect)(CD-11.2.4) Patent Ductus Arteriosus (PDA) (CD-11.2.5) Cor Triatriatum (CD-11.2.6) Congenital Mitral Stenosis (CD-11.2.7) Subaortic Stenosis (SAS) (CD-11.2.8) Congenital Valvular Aortic Stenosis (CD-11.2.9) Aortic Disease in Turner综合征(CD-11.2.10)主动脉症(CD-11.3)主动脉瓣狭窄(CD-11.3.1)主动脉(CD-11.3.1)主动脉(CD-11.3.2)瓣膜肺stenosis(CD-11.3.2)的骨质缩回Fallot的异常(CD-11.3.6)四边形(TOF,VSD,带PSD)(CD-11.3.7)右心室到肺动脉导管(CD-11.3.8)大动脉(TGA)(TGA)(CD-11.9.9)的转置(CD-11.3.9)
使用机器学习技术研究影响牙科诊所患者保留的因素
摘要。将过渡金属复合物用作光催化剂,允许以杰出的方式进行多种有机转化的性能,不仅以高收益率,TOF和选择性值为特征,而且还通过调节和提供对新的分子结构的访问,而没有它们,这些分子结构将是困难的,即使不是不可能的。然而,关于这些光催化剂使用的最大问题之一依赖于与它们从反应介质中隔离相关的困难,并在化学过程结束后再生。以上,除了污染反应产物并需要乏味的纯化过程外,还促使催化剂不可避免地损失,直接影响其可回收性。此外,从经济和环境的角度来看,这种情况会导致负面结果,因为过渡金属络合物通常是昂贵的材料,并且它们不成功的恢复可能导致泄漏到环境中。
开创性内部监测
Figure 1: Overview Legislation regarding in-cabin monitoring 7 Figure 2: Overview automotive safety institutions 8 Figure 3: Overview consumer test organizations 13 Figure 4: Metaphor for in-cabin monitoring systems as a butler 14 Figure 5: Overview of applications from user requirements study 15 Figure 6: Selection of companies working on DMS 15 Figure 7: Overview applications on market 16 Figure 8: Melexis ToF sensor specifications 16 Figure 9: OMS检测功能来自NIR和深度图像17图10:DMS检测功能与Metexis TOF及其NIR图像传感器18图11:来自消费电子电子的概述应用18图12:来自Daimler Truck(FUSO)的Quirin Anker(FUSO)19图13:应用程序23:使用PRIO 1的应用程序23:启动PRIO 1应用程序应用程序,以启用相机技术,以启用相机技术,以启用启用相机技术。28 Figure 15: Elena Zhelondz, A2MAC1 31 Figure 16: Sensors used for in-cabin monitoring 31 Figure 17: Most popular locations of DMCs 32 Figure 18: Average cost of interior sensors 32 Figure 19: Prof. Dr. Rainer Stiefelhagen 34 Figure 20: Prof. Dr. Jürgen Beyerer 35 Figure 21: Typical camera positions with different lens opening angles 38 Figure 22: Martin Lass, Infineon 39图23:评估的测量功能概述40图24:五个不同的相机位置的模拟传感器数据和驱动程序的两个不同次级活动40图25:ChatGpt4 2024年4月,根据卡宾蛋白室内图像43图26:用于驾驶员活动的驱动器和ACT数据集的驾驶员和ACT数据集的警告43:预期技术的驱动器和ACT数据集43:预期的技术<43:43:预期的技术<43:43:43:43

细菌的功能和系统发育多样性...
bafes-有氧细菌内孢子形成c-碳cbafes-有氧细菌收集CSD内孢子训练-DPA冷休克域 - eps二倍酸 - 外多糖物质GFP-绿色荧光蛋白 - 绿色荧光蛋白Maldi -tof - Matrix Assisted Leisure Disruption Ionization - Time of Flight (MCF - Met phase contrast microscopy - ML Transmission Electronic Microscopy - Maximum Ladies MP - Maximum PARCIMONIA NA - NJ Sodium - Nucleotide Otu Nucleotide - Taxonomic Unit Operational PB - Basis PC - PG Cell Wall - Peptideoglycan SASP - Small Proteins Soluble Acid SL - Sensu Lato SS- sensu stricto otu-分类单元TGH-水平基因转移 - 紫外线分类单元 - 紫外线

通过使用瞬态直方图解锁接近传感器的性能
摘要 - 我们提供了通过利用一类近距离飞行时间(TOF)距离传感器捕获的瞬态直方图来恢复平面场景几何形状的方法。瞬态直方图是一个一维的时间波形,它填充了入射在TOF传感器上的光子的到达时间。通常,传感器使用专有算法处理瞬态直方图以产生距离估计值,距离估计值通常在几种机器人应用中使用。我们的方法直接利用了瞬态直方图,以使平面几何形状能够更准确地恢复,仅使用专有距离估计值,并且平面表面的反照率的一致恢复,而单独的距离估计是不可能的。这是通过可区分的渲染管道来完成的,该管道模拟了瞬态成像过程,从而可以直接优化场景几何形状以匹配观测值。为了验证我们的方法,我们从广泛的观点中捕获了八个平面表面的3,800个测量值,并表明我们的方法在大多数情况下都以数量级优于专有距离基线的基线。我们演示了一种简单的机器人应用程序,该应用程序使用我们的方法感知与安装在机器人臂端效应器上的传感器的平面表面的距离和斜率。I. i tratoduction o ptally of飞机近距传感器最近已广泛使用场景瞬变。尽管这些传感器具有许多理想的属性,但现有的机器人应用程序不利用瞬态直方图,而是依靠低分辨率(最多最多这些传感器通过用光脉冲照亮场景,并在瞬态直方图中从场景中重新转移到场景中,从而测量该脉冲的形状,如图1。这些瞬态传感器在机器人技术中的使用是由于它们可靠地报告较大范围内(1cm -5m)的距离估计值,同时较小(<20 mm 3),轻量级和低功率(按测量的毫米级订单)[1],[2],[2]。由于其形式,可以将瞬态传感器放置在较高分辨率3D传感器无法的位置,例如在机器人操纵器的抓地力或链接上,或在非常小的机器人上。