XiaoMi-AI文件搜索系统
World File Search SystemTXD
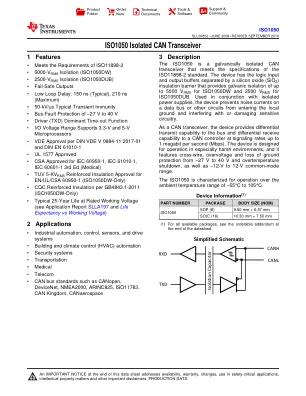
ISO1050 隔离式 CAN 收发器数据表 (Rev. J)
(1) 一旦 TXD 处于显性状态的时间超过 (t TXD_DTO ),TXD 显性超时 (t TXD_DTO ) 便会禁用收发器的驱动器,从而将总线线路释放为隐性,防止因锁定总线显性而导致的局部故障。驱动器只能在 TXD 返回高电平(隐性)后再次传输显性位。虽然这可以保护总线免受锁定总线显性位的局部故障的影响,但它限制了可能的最小数据速率。CAN 协议允许最多 11 个连续显性位(在 TXD 上),以应对最坏的情况,即五个连续显性位后紧接着一个错误帧。这与 (t TXD_DTO ) 最小值一起限制了最小比特率。最小比特率可以通过以下公式计算:最小比特率 = 11/ (t TXD_DTO ) = 11 位 / 300 µs = 37 kbps。
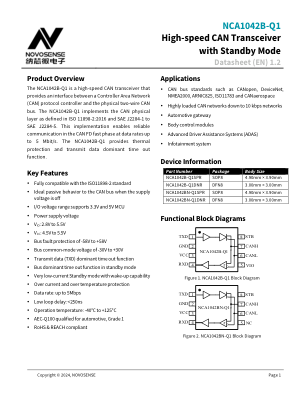
具有待机模式的 NCA1042B-Q1 高速 CAN 收发器
7.1. 概述 ................................................................................................................................................................................ 14 7.2. 功能框图 ................................................................................................................................................................ 14 7.3. 特性描述 ................................................................................................................................................................ 15 7.3.1. TXD 显性超时功能 (TXD DTO) ............................................................................................................................. 15 7.3.2. 总线显性超时功能 (Bus DTO) ............................................................................................................................. 15 7.3.3. 引脚 VCC 和 VIO 上的欠压检测 ............................................................................................................................. 15 7.3.4. 未上电设备 ............................................................................................................................................................. 15 7.3.5. TXD 和 STB 输入引脚的内部偏置 ............................................................................................................................. 15 7.3.6. 7.3.7. 过流保护 (OCP) ...................................................................................................................................................... 16 7.4. VIO 电源引脚 ...................................................................................................................................................... 16 7.5. 设备功能模式 ...................................................................................................................................................... 16 7.5.1. CAN 总线状态 ...................................................................................................................................................... 16 7.5.2. 正常模式 ............................................................................................................................................................. 17 7.5.3. 待机模式 ............................................................................................................................................................. 17 7.5.4. 驱动器和接收器功能表 ................................................................................................................................ 17

可以使用算法接收器故障检测
没有终止电阻,收发器的内部共同模式电压缓冲区仍然可以将canh and Canl带在一起,但速率要慢得多。总线线上的电容载荷也可以减慢CANH和罐头电压的合并。When the controller sends pulses to the TXD pin, and if the recessive interval is not long enough for the differential voltage (CANH – CANL) to go below the input low-threshold for 10 consecutive pulse cycles (RXD signal stays low for the 10 TXD-signal pulses), a trans- mission failure fault will be reported.这也意味着,如果TXD信号的高时间太长,则可以进入隐性模式,并且RXD信号将变高,不会报告传输故障故障。推荐的最小TXD脉冲频率检测到反式失效故障,为200 kHz。

NSiP1042 信号隔离 CAN 收发器,集成 DC-DC 转换器
7.1. 器件功能模式 ................................................................................................................................................ 13 7.2. TXD 显性超时功能 ...................................................................................................................................... 14 7.3. 电流保护 ...................................................................................................................................................... 14 7.4. 过温保护 ...................................................................................................................................................... 14

NSI1042/NSI1052 - 数据表 (EN) 1.3
7.1. 器件功能模式 ................................................................................................................................................................ 17 7.2. 待机模式 ................................................................................................................................................................ 18 7.3. TXD 显性超时功能 ................................................................................................................................................ 18 7.4. B US 显性超时功能 ................................................................................................................................................ 18 7.5. 电流保护 ................................................................................................................................................................ 18 7.6. 过温保护 ................................................................................................................................................................ 18

NCA1042 High-speed CAN Transceiver with Standby Mode
6.1。O VERVIEW ......................................................................................................................................................................... 13 6.2.D EVICE F UNCTIONAL M ODES ................................................................................................................................................ 14 6.3.N ORMAL MODE .................................................................................................................................................................. 14 6.4.S TANDBY MODE .................................................................................................................................................................. 14 6.5.TXD DOMINANT TIME - OUT FUNCTION .................................................................................................................................... 14 6.6.RXD DOMINANT TIME - OUT FUNCTION .................................................................................................................................... 14 6.7.C URRENT P ROTECTION ....................................................................................................................................................... 15 6.8.O VER T EMPERATURE P ROTECTION ........................................................................................................................................ 15 6.9.VIO O UTPUT S UPPLY .......................................................................................................................................................... 15

TCAN1046V-Q1 双汽车故障保护 CAN 收发器数据表 (Rev. C)
TCAN1046V-Q1 收发器支持高达 8 兆比特每秒 (Mbps) 的传统 CAN 和 CAN FD 网络。TCAN1046V-Q1 包括通过 V IO 端子进行的内部逻辑电平转换,允许将收发器 IO 直接连接到 1.8 V、2.5 V、3.3 V 或 5 V 逻辑 IO。两个 CAN 通道通过待机引脚支持独立模式控制。这样可以将每个收发器置于其低功耗状态、待机模式,而不会影响另一个 CAN 通道的状态。在待机模式下,TCAN1046V-Q1 支持通过 ISO 11898-2:2016 定义的唤醒模式 (WUP) 进行远程唤醒。TCAN1046V-Q1 收发器还包括许多保护和诊断功能,包括热关断 (TSD)、TXD 显性超时 (DTO)、电源欠压检测和高达 ±58 V 的总线故障保护。

AN10211 TJA1040 高速 CAN 收发器
图 2 中的框图描述了 ECU 的内部结构。通常,ECU 由独立收发器(此处为 TJA1040)和集成 CAN 控制器的主机微控制器组成,由电压调节器供电。虽然高速 CAN 收发器需要 +5 V 电源电压来支持 ISO11898 总线电平,但新的微控制器产品越来越多地使用 3.3 V 等较低电源电压。在这种情况下,微控制器电源需要专用的 3.3 V 电压调节器。协议控制器通过串行数据输出线 (TXD) 和串行数据输入线 (RXD) 连接到收发器。收发器通过其两个总线端子 CANH 和 CANL 连接到总线线路,这两个总线端子提供差分接收和发送功能。对于 TJA1040,引脚 STB 连接到主机微控制器的 I/O 引脚,用于操作模式控制。可以使用引脚 SPLIT 进一步改进分裂终端方法,以实现共模电压的直流稳定(第 4.4 节)。
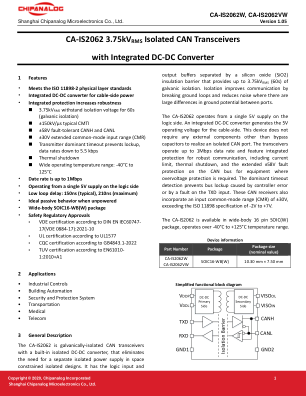
CA-IS2062 3.75kVRMS 隔离式 CAN 收发器,带有...
输出缓冲器由二氧化硅 (SiO2) 绝缘屏障隔开,可提供高达 3.75kV RMS (60s) 的电流隔离。隔离通过断开接地环路来改善通信,并在端口之间的接地电位差较大时降低噪声。CA-IS2062 在逻辑侧由单个 5V 电源供电。集成的 DC-DC 转换器为电缆侧产生 5V 工作电压。该设备不需要除旁路电容器以外的任何外部组件来实现隔离的 CAN 端口。收发器的工作数据速率高达 1Mbps,并具有集成保护功能以实现稳健的通信,包括电流限制、热关断和 CAN 总线上的扩展 ±58V 故障保护,适用于需要过压保护的设备。主要超时检测可防止由控制器错误或 TXD 输入故障引起的总线锁定。这些 CAN 接收器还包含 ±30V 的输入共模范围 (CMR),超过了 ISO 11898 规范的 -2V 至 +7V。 CA-IS2062 采用宽体 16 引脚 SOIC(W) 封装,工作温度范围为 -40°C 至 +125°C。
用于智能门驱动板的双向通信电源电路
摘要 - 在电源电路中,栅极驱动器需要提供功率半导体器件的最佳和安全切换。如今,栅极驱动器板包含越来越多的功能,例如短路检测、软关断、温度感应、通态电压监控……正在研究集成在线监控功能以实现预测性维护。栅极驱动系统的仪表假定集成了通信系统来传输监控数据。在高功率设计中,栅极驱动器板上必须进行电流隔离。隔离栅上的寄生电容在这些设计中至关重要,因为它可能导致切换期间共模电流的循环。因此,由于电磁干扰 (EMI) 的限制,在隔离栅上添加额外的光耦合器或变压器是有风险的。本文提出了一种用于驱动 1.2kV SiC 功率 MOSFET 的栅极驱动器的新型双向数据传输方法。所提出的方法可以在单个电源变压器上实现能量传输和双向数据交换。实验结果表明 TxD 为 1Mb/s,RxD 为 16kb/s。目标应用是使用栅极驱动器板对 SiC 功率 MOSFET 进行健康监测。