XiaoMi-AI文件搜索系统
World File Search SystemTempo

屏幕时间在儿童和青少年生活中的后果
多年来,花在屏幕上花费的抽象时间有所增加,尤其是作为娱乐儿童和青少年的一种方式,取代了虚拟世界的社交互动和欢乐时刻,对发展很重要。因此,当该虚拟相互作用的可能后果超过巴西儿科学会建议的最多两小时时,便继续提出注释。从这种解释开始,这项工作的目的是一本参考审查,与屏幕时间恶化的年轻人的身心影响有关。在Google Scholar,Scielo,Medline,EbsCohost平台上找到了用作资源的文献,并在2016年至2022年之间选择了文章。可以得出结论,某些年龄段的屏幕时间不符合建议的屏幕时间,这会导致很多不活动的时间,这与超重,睡眠质量差,抑郁症和焦虑症的增加相关,表明需要那些负责建立更健康常规的人进行干预。关键字:屏幕时间;幼儿;青春期;孩子们;青少年。摘要多年来创建的屏幕上花费的时间,主要是作为招待儿童和青少年的方式,社交替代了互动和欢乐时刻,这对于与虚拟世界的发展很重要。因此,当该虚拟相互作用的可能后果超过巴西儿科学会建议的最多两个小时时,仍然会记下注释。基于此解释,这项工作的目的是一份书目评论,与屏幕时间恶化的年轻人的身心影响有关。在Google Scholar,Scielo,Medline,EBSCohost平台上找到了用作来源的文献,并选择了2016年至2022年之间的文章。可以得出结论,不符合某些年龄段的推荐屏幕时间,这会导致很多时间不活动,这与超重,睡眠质量差,抑郁症和焦虑症的增加相关,这表明需要那些负责建立更健康常规的人进行干预。关键字:屏幕时间;幼儿;青春期;孩子们;青少年。恢复El Tiempo que se pasa con las pantallas ha amumentado conlosaños,校长科莫·科莫·科莫·科莫·恩纳(Como como como como como como como como como)así,continúantomándosenotas sobre las posibles consecuencias de esaInteracción虚拟cuando supera el supera el eelmáximode dos horas do horas diarias rocomendadas por la sociedad brasiledadbrasileñadepediatría。partir de esta exta extaivo de este de este trabajo es unarevisiónbibliográficaficográficareacionada con las con las afectacionesfísicasypsíquicasypsíquicasenjóvenesenjóvenescon tiempo de pantalla exacerbado。lituratura utilizada como fuente seecontróenlas plataformas Google Scholar,Scielo,Medline,EbsCohost,se EscogieronArtículosentre entre entre 2016 y 2022。帕拉布拉斯·克拉夫(Palabras Clave):tiempo de Pantalla; NiñezTemprana; Adopcencia;尼诺;青少年。可以得出结论认为,某些年龄段的屏幕时间不能满足推荐的屏幕时间,这会导致很多不活跃的时间,这与超重,睡眠质量不佳,抑郁和焦虑症的增加有关,这表明那些负责建立更健康常规的人的干预需要。 div>
根据艺术雇用固定期限研究人员的规定。 24
a) 从第 3 条所提及的合同中受益; 3-bis,或者,即使不是连续的,至少三年,根据艺术的研究资助。 51,c. 6、法律 449/97 并根据艺术。 240/2010 号法律第 22 条及其后续修正案,或根据第 240/2010 号法律第 22 条规定的博士后奖学金。 398/89 号法律第 4 条; b) 已从本条所指的合同中受益至少三年。 1,c. 14,法律230/2005; c) 曾受益于外国大学的类似合同、助学金或奖学金;将根据现行部长令对这一类比进行评估; d) 已根据艺术获得一级或二级角色的国家科学资格。 16 或拥有医学专业资格。 2. 在a、b和c的假设中,要达到三年期限,可以积累包括外国大学在内的大学颁发的固定期限研究合同、研究补助金和奖学金的所有权。 3. 每年用于开展教学、辅助教学和学生服务活动的总时间为:全日制350小时;固定时间200小时。 4.高级合同研究员每年需承担本科、单科、硕士、专业及博士课程教学计划内的院校教学任务,课堂教学时间不少于48小时,最多为96小时。

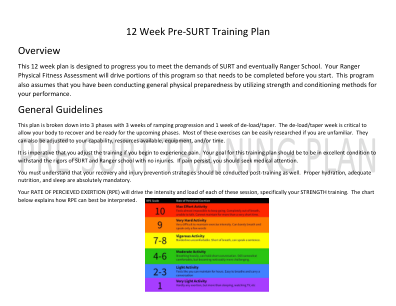
12 周 SURT 前培训计划概述一般准则
1 英里热身(无计时) 1 英里@短节奏 1 英里轻松(无计时) 1 英里@短节奏 1 英里轻松(无计时) 1 英里@短节奏 1 英里冷静(无计时) 热身和冷却 英里速度缓慢且无计时。除了这些热身/冷却英里之外,您仍然需要进行一般热身和冷却。短节奏速度比您的 5 英里评估时间慢 20 秒。中速速度比您的 5 英里评估时间慢 40 秒。


过苯甲酸叔丁酯分解的热危害评估和自由基抑制
摘要 过苯甲酸叔丁酯(TBPB)是一种常见的聚合反应引发剂,但其分子结构中的过氧键极易断裂,导致分解甚至爆炸。为探究TBPB的热行为,抑制反应过程中产生的自由基的热危害,采用成熟的量热技术对TBPB的热稳定性进行了测定。采用Kissinger-Akahira-Sunose (KAS)、Flynn-Wall-Ozawa (FWO)和Starink动力学方法计算了TBPB分解反应的表观活化能。通过傅里叶变换红外光谱(FTIR)实验测定了TBPB热分解产物,利用电子顺磁共振波谱(EPR)结合自由基捕获技术对反应过程中产生的自由基进行了定性分析。本研究选取自由基捕获剂及抑制剂2,2,6,6-四甲基哌啶氧基(TEMPO)作为TBPB热分解反应热失控抑制剂,验证了其对相应自由基及TBPB分解反应热失控的抑制效果。研究发现TEMPO可有效降低TBPB潜在的热危险性和事故风险,为TBPB生产、储运过程中热灾害的预防与治理提供有力参考。
NASA - 国家科学院
– TEMPO 被选为 GEO 托管有效载荷机会(2018 财年早期发射) – ESD 在正式主机选择/谈判方面取得了出色进展 – 第二次“EV-I/2”征集于 2013 年 7 月发布,提案截止日期为 2013 年 11 月 25 日 – 2014 财年预算提案包括 EV-Instrument/3 和按计划进行的后续征集
清洁氢的最终用途和注意事项网络研讨会......
参考文献:1. 使用 TEMPO 模型的 NREL MDHD 分析;2. 来自 NREL 的生物燃料路径分析;3. 基于 H2@Scale 的合成燃料分析;4. 基于 DOE 工业脱碳路线图和 H2@Scale 的钢铁和氨需求估计。基于 IRENA 和 IEA 估计的甲醇需求;5. 初步分析,NREL 100% 清洁电网研究;6. DOE 太阳能期货研究;7. 普林斯顿净零美国研究

OpenKnowledge Srl - 哈佛商业评论意大利版
如果我们给这本插页起的标题《重现的时光》能让读者想起马塞尔·普鲁斯特的作品,那么这正是我们想要的。在上个世纪最伟大的文学杰作之一《追忆似水年华》中,时间的主题是一条必不可少的线索,与记忆的主题交织在一起。但即使在今天,这个话题在组织世界和整个社会中仍然受到极大关注。了解我们生活的时代从未如此重要。普鲁斯特给予我们的帮助至少涉及两个层次。 《追忆似水年华》是《追忆似水年华》的第七卷,也是最后一卷。这部非凡的作品将内省、自传分析与历史、社会时间联系起来。第七卷特别讲述了过去的事件如何在生命的后期获得了不同的意义。这就是我们撰写此附件的观点。我们正在经历的阶段允许恢复过去的一系列行为——然而,我们可以用新的眼光重新审视、重新考虑这些行为,并在私人生活和组织实践中部分地做出更好的改变。