XiaoMi-AI文件搜索系统
World File Search SystemTouch

无需触摸或语音即可与机器人交互
随着机器人领域的发展,与机器人交互和控制这些机器人的方法也在不断发展。许多现代机器人可以通过无需语音或触摸的命令进行通信。这一趋势背后的两个主要动机是帮助残疾人士和希望实现更自然的人机交互 (HRI)。通过允许与机器人进行非语言交流,系统的可访问性得到了提高,从而使更多人可以与机器人系统交互并从中受益。此外,非语言交流提供了更自然的交流,这可以为 HRI 带来许多好处。本文概述了现有的非接触式和非语言人机界面技术;它介绍了最流行的界面方法、它们的用途和局限性。并讨论了未来的研究方向。
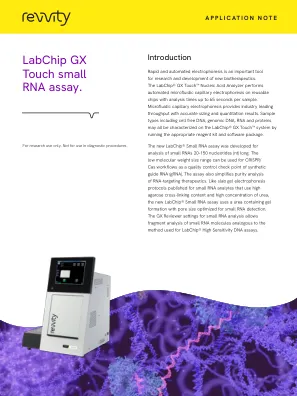
慢病毒颗粒LabChip GX触摸小RNA分析。
图2:多个运行中的小RNA尺寸性能。与使用参考仪器(紫色棒)获得的大小相比,显示的8次小RNA分析物的大小是观察到的尺寸。每个运行(粉红色棒)将RNA分子i 16次。显示的误差线是16个测量值的标准偏差。

人类机器人互动的聚类社交手势
摘要。社交触摸提供了人类和机器人之间丰富的非语言交流。先前的工作已经确定了一套用于人类互动的触摸手势,并用自然语言标签(例如,抚摸,拍拍)描述了它们。然而,尚无关于用户思想中的触摸手势之间的半智关系的数据。为了赋予机器人的触摸智能,我们调查了人们如何看待文献中的社会触摸标签的相似之处。在一项在线研究中,有45位参与者根据他们的相似之处对36个社交触摸标签进行了分组,并用描述性名称注释了他们的分组。我们从这些分组中得出了手势的定量相似性,并使用层次聚类分析了相似性。分析导致围绕手势的社会,情感和接触特征形成9个触摸手势。我们讨论了结果对设计和评估触摸感应和与社交机器人的互动的含义。

用户手册| Powerbrain Touch 8 Chess&Games
请注意边缘周围的字母和数字。八个正方形的水平行称为等级;排名从1到8。垂直列称为文件;文件由字母A-H标识。正方形由其坐标标识,即其文件的字母及其等级的数量。例如,白王在E1上开始比赛。每个正方形都是“敏感的”,即它响应轻触。进行移动时,您只需使用虚拟笔的尖端触摸自己的件正方形。用“哔哔声”承认有效的触摸。如果您触摸了显示的错误部分(例如您不能合法移动的正方形,计算机发出其“错误”信号 - 低嗡嗡声。只需触摸正确的位置而继续。消息区域

航空领域的空中触觉技术 - 在有物体的地方创造触觉
空中触觉这项令人兴奋的新技术已被汽车和娱乐等多个行业采用,但它尚未出现在模拟飞行员训练或现实驾驶舱中。全飞行模拟器的制造、维护和操作成本高昂。不仅如此,每个模拟器仅限于一种飞机类型,这对于拥有多架飞机的大多数航空公司来说效率低下。随着触摸屏仪表的日益流行,驾驶舱显示器需要飞行员将注意力从窗外的视线中移开。但通过使用手势识别界面结合空中触觉反馈,我们可以弥补这一缺陷,同时为已经熟悉使用传统驾驶舱和传统仪表的飞行员增加现有技术的另一个维度。同时,使用增强现实和虚拟现实技术的模拟环境提供了高质量的沉浸式培训,飞行员可以从数百小时的模拟训练转变为在第一次飞行中对数百人的生命负责。空中触觉技术提供的软件可重新编程性和动态丰富性与基本全动平台相结合,可以实现仪表布局的互换,从而增强模拟沉浸感和环境。最后,通过借鉴和探索汽车行业的概念,本概念论文介绍了驾驶舱设计如何通过采用这项技术进行演变。如果飞行员的证词表明他们可以适应虚拟物体,那么这可以取代物理控制吗?

视觉、听觉近距离感官:味觉、嗅觉、触觉……
我们的 8 种感觉:远感:视觉、听觉近感:味觉、嗅觉、触觉、本体感觉、前庭加:内感觉前庭:平衡感、保持头部和身体姿势、确定运动方向和速度、感觉身体在空间中的运动、内耳。本体感觉:帮助孩子建立身体意识的感觉。力度感,确定身体在空间中的位置,控制四肢,感觉力量或重量。内感觉:知道身体内部发生了什么的感觉。我们利用近感来滋养感官本体感觉活动 = 阻力活动瑜伽、身体袜、蹦床、治疗球、加重球。• 用于进入恰到好处的状态• 用于组织大脑和身体• 用于创造身体意识前庭活动 = 头部离开直立位置的活动 - 跑步、跳跃秋千、动物散步、滑板车、在治疗球上弹跳。 • 用于警示孩子(将头部移出多个位置) • 用于安抚孩子(头部朝一个线性方向移动) 触觉活动 = 涉及触摸的活动 • 使用增加的触觉输入来提高我们接受触觉输入的能力 • 用于获得调节和减轻压力(深度压力) • 用于警示孩子(轻触) 家庭感觉策略: • 使用图片时间表 • 避免匆忙。尽量减少屏幕时间(电视、视频游戏、电脑)。睡前 1 小时不要看屏幕。 • 在时间表中允许进行各种运动活动。 • 在家中安全的地方。 • 对肌肉和关节进行深度压力的活动始终对神经系统有益。 • 当孩子变得苦恼或失调时,少说话。 • 在 You Tube 上观看梅宁夫人的人行道粉笔感觉运动通路 #2。

电容式触摸 QE V3.2.0 发行说明 - 瑞萨
(uint32_t)gp_touch_monitor_size = (uint32_t)g_touch_monitor_size; #else (uint32_t)gp_touch_monitor_buf = monitor_buf_address; (uint32_t)gp_touch_monitor_id = monitor_id_address; (uint32_t)gp_touch_monitor_size = monitor_size_address; #endif 正确)#if (TOUCH_AUTO_JUGE_MONITOR == 0) gp_touch_monitor_buf = (uint8_t *)g_touch_monitor_buf; gp_touch_monitor_id = (uint8_t *)&g_touch_monitor_id; gp_touch_monitor_size = (uint16_t *)g_touch_monitor_size; #else gp_touch_monitor_buf = (uint8_t *)monitor_buf_address; gp_touch_monitor_id = (uint8_t *)monitor_id_address; gp_touch_monitor_size = (uint16_t *)monitor_size_address; #endif
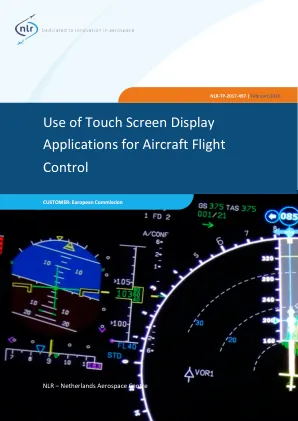
触摸屏显示应用在飞机飞行中的应用...
摘要 — 触摸屏技术正迅速而渐进地进入商用航空电子领域,并被引入驾驶舱。本文介绍了荷兰航空航天中心 (NLR) 作为欧盟第 7 框架计划的 ACROSS(减少压力和工作量的先进驾驶舱)项目的一部分进行的试点实验的主要结果,请访问 www.across-fp7.eu。该实验的重点是新型触摸屏应用在民用运输飞机驾驶舱中的使用,并研究了(峰值)工作量减少的潜力。将讨论三种不同的触摸屏应用和相关的实验结果。首先,解决飞机的所谓战术飞行控制操作,例如改变飞机的速度、航向、高度、飞行高度或垂直速度。其次,设置了一种新颖的后期跑道变更功能,以支持机组人员在进近后期接受新着陆跑道的决定,同时仍允许安全轻松地配置飞机驾驶舱系统。同样,第三个新应用程序允许快速轻松地选择备用机场,随后创建和选择前往备用机场的新航线。进行了一项试点实验,十名航空公司机组人员参加了 NLR 的全动飞行模拟器 (GRACE)。基线形成了当今没有触摸屏功能的飞机运营。主观工作量和情况意识
湍流触摸:驾驶舱飞行显示器的触摸屏输入
摘要 商用飞机驾驶舱中的触摸屏输入具有潜在优势,包括易于使用、可修改和减轻重量。然而,对湍流的耐受性是其部署的挑战。为了更好地了解湍流对驾驶舱输入方法的影响,我们对三种输入方法的用户性能进行了比较研究——触摸、轨迹球(目前在商用飞机中使用)和旨在帮助手指稳定的触摸屏模板覆盖。在各种交互式任务和三种模拟湍流水平(无、低和高)下比较了这些输入方法。结果表明,随着振动的增加,性能下降,主观工作量增加。当精度要求较低时(在所有振动下),基于触摸的交互比轨迹球更快,但对于更精确的指向,尤其是在高振动下,它更慢且更不准确。模板没有改善触摸选择时间,尽管它确实减少了高振动下小目标的错误,但只有当手指抬起错误通过超时消除时才会发生。我们的工作为受湍流影响的任务类型以及在不同振动水平下表现最佳的输入机制提供了新的信息。
湍流触摸:驾驶舱飞行显示器的触摸屏输入
摘要 商用飞机驾驶舱中的触摸屏输入具有潜在优势,包括易于使用、可修改和减轻重量。但是,对湍流的耐受性是其部署的挑战。为了更好地了解湍流对驾驶舱输入方法的影响,我们对三种输入方法的用户性能进行了比较研究——触摸、轨迹球(目前在商用飞机中使用)和旨在帮助手指稳定的触摸屏模板覆盖。在各种交互式任务和三个模拟湍流级别(无、低和高)下比较了这些输入方法。结果表明,随着振动的增加,性能下降,主观工作量增加。当精度要求较低(在所有振动下)时,基于触摸的交互比轨迹球更快,但对于更精确的指向,尤其是在高振动下,它的速度较慢且准确性较低。模板并没有改善触摸选择时间,尽管它确实减少了高振动下小目标的错误,但只有当手指抬起错误通过超时消除时才会发生这种情况。我们的工作提供了有关受湍流影响的任务类型以及在不同振动水平下表现最佳的输入机制的新信息。