XiaoMi-AI文件搜索系统
World File Search SystemTouring

2024 Lucid Air Touring-技术规格
制动系统4轮抗锁制动系统(ABS)具有电子制动力分布,牵引力控制,稳定性控制,通过制动进行扭矩向量。电辅助制动助力器(液压链接,而不是逐线制动)。一种用于平滑模式的校准,一种用于Swift/Sprint模式的共享校准)。加速器踏板通过电动机进行再生制动。用户交换3模式清醒稳定性控制(更改ABS,牵引力控制,稳定性控制,通过制动校准进行扭矩矢量)。
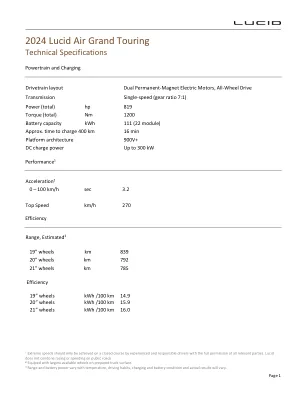
2024 Lucid Air Grand Touring-技术规格
制动系统4轮抗锁制动系统(ABS)具有电子制动力分布,牵引力控制,稳定性控制,通过制动进行扭矩向量。电辅助制动助力器(液压链接,而不是逐线制动)。一种用于平滑模式的校准,一种用于Swift/Sprint模式的共享校准)。加速器踏板通过电动机进行再生制动。用户交换3模式清醒稳定性控制(更改ABS,牵引力控制,稳定性控制,通过制动校准进行扭矩矢量)。
埃里巴大篷车 2023
65 多年来,ERIBA 大篷车一直在世界各地行驶——但仍有太多东西有待发现。包括标志性的 ERIBA Touring 的新化身,它经过了彻底的重新设计,现在为冒险的个人主义者提供了更多的舒适感。无论您的旅程将带您去哪里,都从度假之家开始——探索 ERIBA 车型系列。无论您喜欢 Touring、Touring 820 还是我们的 Feeling 和 Nova Light 车型——每款 ERIBA 都以质量、设计、技术和舒适为特色。探索色彩和装饰选项的世界,让您的大篷车与您驾驶的旅行一样独特。期待新的冒险和舒适与幸福的新维度。“全包”是昨天。为您的“全包”假期做好准备。
国际参与策略2021-25
为了建立可持续性和韧性,我们将投资新的和新兴的技术来概述和分发澳大利亚创意实践。我们将原型和激活混合国际参与模型,将思想和框架的移动性优先于身体表现和巡回演出;它通过缓慢的参与策略和长期建立关系提供了飞行,飞出巡回演出模型的替代方案。

ERIBA 大篷车 2022
60 多年来,ERIBA 一直在房车领域树立新标准。有一款车型尤为突出:标志性的 ERIBA Touring——Erwin Hymer 和 Erich Bachem 打造的第一款车型,开创了前所未有的成功故事。但尽管这种经久不衰的设计在六十年后仍然让粉丝们感到满意,但其他三个车型系列在质量、设计、技术和舒适度方面也有很多值得称道的地方。多种颜色和装饰选择为个性化提供了空间,让您的房车与您驾驶的旅行一样独特。期待新的冒险,在舒适度方面,一切都不会有意外。
国会议员 Gabe Amo - House.gov
在与劳工领袖和高等教育专家举行的圆桌会议上,或在与海军创新领导人会面并参观船舶制造设施时,我亲眼目睹了通过投资构成蓝色经济的人员和地点我们可以释放的机遇。
2024-2030 年游客经济战略
重大国内和国际活动 重大国内和国际活动包括博尔顿美食饮料节,包括博尔顿美食饮料节——英国最大的美食节,吸引了约 500,000 人;IRONMAN UK 主办地——英国最大的美食节,吸引了约 500,000 人;IRONMAN UK 和世界上最大的 IRONKIDS 赛事主办地;主办 2021 年橄榄球联盟世界杯和世界上最大的 IRONKIDS 赛事;主办 2021 年橄榄球联盟世界杯,包括英格兰对法国作为男子锦标赛的一部分,让博尔顿在全球体育旅游地图上占有一席之地;国际体育场巡演艺术家;和博尔顿电影全球体育旅游地图;国际体育场巡演艺术家;和博尔顿电影节。

情况说明书 – 西澳就业计划 强劲的经济
此外,还有 1770 万美元用于在四年内实施国家公园旅游体验发展计划。其中包括 650 万美元用于在国家公园内建立八个“随时可用”的景点,为包括生态度假住宿在内的私人投资做准备,以及 500 万美元用于与行业合作,以激活对国家公园内现有步道和景点的重大投资,并为当地人、州外游客和国际游客提供可预订的旅游选择。
销售条款
Schwinn Photo 剧照和《自行车杂志》1984 年 2 月 215 辆自行车购买指南的准备材料。拍品包括《自行车杂志》期刊样本 + 照片、剧照、模型、艺术板等。图示的车型有 Competition、Touring、Peloton、Voyager、Le Tour 和 High Sierra。包括芝加哥 Gamma Photo Labs 的原始透明胶片。当时,仅这些就可能花费 Schwinn 超过 10,000 美元。约 30 件,尺寸从 3-1/2" x 4-1/4" 到 18-1/2" x 24-1/2"。艺术板为 15" x 20"。来自 1997 年 4 月 6 日的 Leslie Hindman Schwinn 特卖。一些脏污的物品。状况好坏参半。估价:200.00 - 300.00 成交价:1,805.00