XiaoMi-AI文件搜索系统
World File Search SystemToy
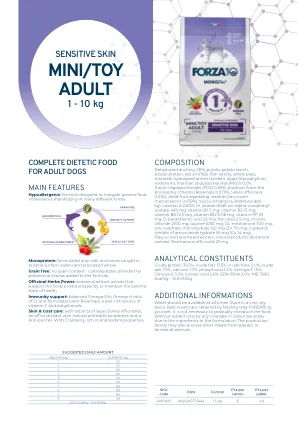
迷你/玩具成人
组成脱水的凤尾鱼28%,土豆,马铃薯淀粉,马铃薯蛋白,油和脂肪(鱼油6%),全豌豆,矿物质,水解动物蛋白,藻类(Ascophyllum nodosum),曼南(Mannan)寡糖(MOS)0.2%,果酱 - 果糖(Froucto-Oligosacachiesd 0.079%,salvia officinalis 0.01%),干果挤压残留物(疫苗摩克彭蓬0.039%),丝兰schidigera。添加剂(每千克):维生素A 24500 UI,维生素E/全rac-alpha-丙泊酸酯406 mg,维生素B1 5 mg,维生素B2 13 mg,维生素B6 10.3 m6 10.3毫克胆碱氯化物2100 mg,牛磺酸1000毫克,DL-Methionine 700 mg,硫酸锌,一水合物192 mg(Zn 70 mg),铜(II)氨基酸水合物的螯合物56 mg(CU 14 mg)。风味和香气增强剂:天然产品(植物名称):Rosmarinus officinalis 29 mg。

COVID-19、人工智能爱好者和玩具数据集
在计算机科学中,教科书谈到了“垃圾进,垃圾出”(GIGO)的概念;即低质量的输入数据会产生不可靠的输出或“垃圾”。当我们处理高度复杂的数据模式(例如 X 光片和计算机断层扫描)时,GIGO 就变得更加紧迫。任何深度网络的性能都直接取决于它学习的数据集的质量。可靠数据集的一个例子是像 Cancer Imaging Archive [ 1 ] 这样拥有大量专家工作成果的知名存储库 [ 2 ]。遵守 DICOM 标准并确保图像正确链接到支持元数据对于构建精心策划的数据集至关重要。最近几周,我们观察到一种趋势,即匆忙使用不当数据来训练 COVID-19 深度网络。AI 爱好者似乎不耐烦地创建自己的医学图像数据集,而没有寻求临床合作者来指导他们。这些数据集更像是通过手动收集可公开访问的图像(例如在线期刊和非同行评审档案中的预印本)而形成的“玩具集”。大多数时候,没有临床或医学能力的人工智能研究人员会创建自己的实验性“玩具”数据集,以进行初步调查并建立算法挑战框架。需要明确的是,从医学成像角度来看,“玩具数据集”并不是因为非常小且不符合 DICOM 标准而成为玩具,更重要的是因为它是由工程师和计算机科学家创建的,而不是由医生和医学/临床专家创建的。此类 COVID-19 图像数据集已在互联网上出现,

一种意识度量的出生死亡玩具模型
古老的Ouroboros象征主义(一个自我吃的人)在这里整合到一个模拟的出生死亡聚类过程中,除了本身从无法区分的阶段过渡到更高级别的“有意识”的阶段,该过程无需本身。出生和死亡系数是根据奇数甚至指数来提出的,用于通过信息的内部传递来代表有意识状态的合适形式。该玩具模型可以理想地量化有意识的状态,该状态通过Ouroboros in-dex 0 <υα,ω<1。值为υα,ω= 0借给无限环,限制值υα,ω→1揭示了转化为意识。讨论了与意识的物理理论的关系,并讨论了使用Orobous索引来辨别人工智能系统中的意识状态。意识和意志的自由可能会在模型中并排在模型中,当将ω扩展为复杂的数字模量时。
VR 中遥控玩具车的远程操作
摘要:远程操作,也称为远程操作,是一种使车辆、机器人或机器能够远程操作的过程。这样,它在操作员和远程控制的机器(称为远程操作员)之间建立了双向通信通道。远程操作与多种技术、概念和术语相关,例如远程机器人、远程呈现、虚拟现实 (VR) 和增强现实 (AR),并由多个本地和远程组件组成 [1]。许多领域都受益于远程操作。突出的例子是自动驾驶汽车 (AV)、遥控汽车 (ROV)、无人机和娱乐。因此,人类能够通过远程机器探索环境并执行任务,而无需亲自到场。本文的重点是提供最小可行产品,同时介绍了一种在 VR 中远程操作玩具车(Donkey Car S1[ 2 ])的实用解决方案。事实上,VR 是一种使用户能够沉浸在用计算机模拟的环境中并与之交互的技术[ 3 ]。由于 VR 用户充分利用了沉浸式显示的优势,并感觉完全融入了活动[ 3 ],因此决定在 VR 眼镜(Oculus Quest 2 - 2021 年 11 月更名为 Meta Quest 2[ 4 ])中呈现来自汽车的反馈(摄像头图像)。因此,操作员感觉就像在车内一样,并将使用操纵杆体验驾驶。所提供的解决方案已成功提供
CHEM Trust 对玩具安全法规三方会谈的立场
一些利益相关者声称,REACH 法规更适合保护儿童免受玩具中双酚的危害。然而,现实情况并非如此,因为目前尚不清楚 REACH 何时会针对双酚采取进一步行动。欧盟委员会表示,将根据德国限制某些双酚的提案结果,调查对影响人类健康的双酚的潜在限制。然而,德国的限制提案已被撤回,导致未来几年无所作为。与此同时,我们已经知道,由于以下原因,至少有 34 种双酚可能需要受到限制

一种研究基于人工智能的动态系统稳定性的玩具模型
过去几年,人们做出了许多努力,试图将人工智能 (AI) 应用于大气和气候建模。有一条研究路线试图开发新的数据驱动的参数化方案来取代部分大气模型(例如,Brenowitz & Bretherton,2018 年;Gentine 等人,2018 年;O'Gorman & Dwyer,2018 年);学习基于 ML 的参数化方案意味着学习预测亚网格尺度大气过程(例如湍流和对流)的时间导数。尽管它们承诺为低分辨率大气模型(例如气候模型)提供数值上可承受但准确的物理结果,但当前最先进的 AI 参数化仍然存在偏差,更重要的是,它们面临数值不稳定的问题。据 Rasp (2020) 报道,当与大规模大气流体力学求解器结合时,神经网络 (NN) 通常在数值上不稳定(例如,Brenowitz & Bretherton,2019;Rasp 等人,2018)。据报道,基于随机森林 (RF) 的参数化是稳定的(Yuval & O'Gorman,2020)。但是,与离线相比,基于 NN 的参数化似乎优于基于 RF 的参数化(Brenowitz、Henn 等人,2020)。