XiaoMi-AI文件搜索系统
World File Search SystemTransDucer

测量和测试设备 - Krisbow 电子目录
特点: • 先进的手持式超声波测厚仪。• 适用于超声波可以穿透的大多数金属和非金属材料。• 自动校准零点,修正系统误差。• 显示最小厚度的当前厚度(菜单可选)。• 上下限设置和声音警报。• 可存储 500 个读数。• 两点校准,精度高。• 显示分辨率 0.1mm/0.01mm 可选。• 以毫米或英寸显示。• 带可调背光的大型 LCD 显示屏。• 低电量指示器。• 配备 RS232 接口,用于连接打印机和 PC,并配备可选软件、5PØ 10 传感器(用于常规用途)和可选铸铁传感器。
XI类生物技术研究材料
生物传感器技术将生物学知识与微电子学结合在一起。生物传感器由与细胞,酶或抗体这样的生物组件组成,该生物成分与微型传感器相关联,该设备由一个系统供电,然后将功率(通常以另一种形式)提供到第二个系统。生物传感器正在检测依赖细胞和分子特异性的设备来识别和测量极低浓度的物质。当感兴趣的物质与生物学成分结合时,传感器会产生与物质浓度成比例的电信号。生物传感器可用于:营养价值的测量,食物位置的新鲜度和安全性以及环境污染物的测量5。什么是纳米生物技术?提及该技术的任何两个应用。

具有频率不变点的 C 形母线...
摘要 — 本文首次提出了一种具有频率不变点的无轭母线电流传感器。现有的矩形母线电流传感器由于大块母线中的涡流而存在频率依赖性问题。所提出的传感器具有用于母线传感区域的新型 C 形结构。首次观察到该结构在 C 形母线的两侧提供了一组频率不变点。在所提出的方案中,使用两个差分形式的集成磁通门传感器来测量这些不变点处的磁通密度。使用 Ansys Maxwell 涡流求解器执行的基于有限元法 (FEM) 的 3-D 分析提供了频率不变点的精确位置。制作了一个原型,并使用德州仪器的 DRV-425 集成磁通门传感器在实验室中对 C 形母线传感器进行了功能测试。实验中,放置在频率不变点的磁通门传感器测量了从 50 Hz 到 1000 Hz 的多个频率下的磁通密度。测试结果表明,使用所提出的 C 形母线,由于频率依赖性而导致的误差从 14 % 降低到 0.85 %。

iQ探头
超声波探头(图 1)对于实现出色的成像性能和重复性至关重要。其设计要求开发先进材料,以提高换能器的操作效率并提供出色的图像质量 (IQ) 性能。C 2-9 和 E 3-12 中嵌入的最新技术将先进材料与专门设计的换能器几何形状相结合。声学透镜材料可最大限度地减少混响并提高图像对比度分辨率。Esaote 的创新型背衬块可增加传输到患者体内的超声波能量,同时保持非常宽的带宽(图 2)。这直接转化为增强的图像灵敏度、更高的分辨率、有用的穿透力以及从近场到远场的整体清晰度。自动化和积极的再处理(清洁、消毒和灭菌)趋势要求提高探头的可靠性。为了应对这一趋势,Esaote 开发了一种放置在声学透镜下方的特殊保护层,可有效保护换能器并防止液体进入。凭借这些创新,Esaote 在所有主要模式(无论是基础成像、多普勒还是组织谐波成像)以及整个临床应用范围内的诊断信心和准确性都达到了新的水平。

367 类通信、电气:声波系统...
367 电气通信:声波系统与装置 1 声纳对抗措施 2 应答器 3 .声纳浮标和声纳浮标系统 4 ..带有部件启动或部署装置 5 ..带有多个声纳浮标 6 .带有多个应答器 7 声像转换 8 .声全息术 9 ..地震显示 10 ..液体或可变形表面全息术 11 .带有记忆装置 12 光束稳定或补偿 13 测试、监测或校准 14 地震勘探 15 .海上勘探 16 ..传感器位置控制 17 .液压机械 18 .流体变化 19 ..传感器电缆位置确定 20 ..多水听器电缆系统 21 ..信号处理 22 ..传感器输出加权 23 ..受控源信号 24 ..混响消除 25 .测井 26 ..阈值设置系统 27 ..时间间隔测量 28 ..振幅测量 29 ..峰值振幅 30 ..振幅比较 31 ..非压缩声波能量 32 ..频率相关确定 33 ..深度记录或控制 34 ..接收信号周期鉴别 35 ..井眼或套管状况 36 .陆地折射类型 37 .陆地反射类型 38 ..信号分析和/或校正 39 ..随机信号相关 40 ..接收相关 41 ..传输相关 42 ..标准相关 43 ..滤波器

数字输出传感器和 ∑Δ 转换
图 8 显示了完整 A:D 过程中不同阶段的噪声。在 (a) 处,传感器的模拟前端始终存在白噪声,限制为采样频率的一半。在 (b) 处添加了量化噪声,但仅在高频处。(c) 显示了输出噪声,其中数字滤波器具有较低的截止频率,这对精度有好处;在这种情况下,输出端的噪声与传统模拟传感器与等效滤波器一起使用时的噪声相同。在 (d) 中,输出端使用宽带滤波器,响应时间很快,额外的噪声不是缺点,因为这种类型的输出用于检测超出范围的电流。LEM 数字传感器的多功能性在于能够将 (c) 和 (d) 滤波器类型连接到同一比特流。

F-18B 稳定性和控制参数估计在高动态压力下飞行测试的结果
结果和讨论。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 意外的前缘襟翼偏转。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 控制表面位置传感器和旋转可变差动变压器偏转测量。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 声波分裂。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>.使用控制面位置传感器测量的 20 稳定性和控制导数结果 ...。。。。。。。。 < /div>........... div>......20 纵向稳定性和控制结果 ............。。。。。。。。。。。。。。。。。。。。。。。。...... div>20 横向稳定性和控制结果 ...........。 。 。 。 。 。 。 . . . . . . div> . . . . . . . . . . . . . 22 使用旋转可变差动变压器表面位置的稳定性和控制导数结果 . . . . . . . . . div> . . . . . . . . . . . . 23 空气动力学模型更新 . . . . . . 。 。 。。。。。。。。...... div>............. 22 使用旋转可变差动变压器表面位置的稳定性和控制导数结果 . . . . . . . . . div> . . . . . . . . . . . . 23 空气动力学模型更新 . . . . . . 。 。 。.22 使用旋转可变差动变压器表面位置的稳定性和控制导数结果 ......... div>............23 空气动力学模型更新 . . . . . . 。 。 。23 空气动力学模型更新 ......。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>............. . . . 24 对称前缘襟翼 . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . 25 对称后缘襟翼 . . . . . . . . . . 。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . 25 对称副翼 . 。 。 。 。 。 。 。 。 < /div> . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。....24 对称前缘襟翼 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.25 对称后缘襟翼 ..........。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . 25 对称副翼 . 。 。 。 。 。 。 。 。 < /div> . . . . . .。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。....25 对称副翼 .。。。。。。。。 < /div>...........。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25 差动前缘襟翼 ............。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . 25 差动后缘襟翼 . . . . . . . . . 。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 26 副翼 . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。..25 差动后缘襟翼 .........。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 26 副翼 . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。。。。。26 副翼 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。26 差速稳定器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。26
论文发表(2011 财年)- 国防部
使用弯曲压电盘的 Tonpilz 压电换能器的频率特性估计 Applied Acoustics Elsevier 第 72 卷,第 12 期,2011 年 12 月 Tomonao Okuyama Kenji Saijo

用于电子靶向脑刺激的多点经颅磁刺激系统
方法:我们设计并制造了一个平面 5 线圈 mTMS 换能器,以便控制直径约为 30 毫米的皮质区域内感应电场的最大值。我们开发了电子设备,其设计由独立控制的 H 桥电路组成,可驱动多达六个 TMS 线圈。为了控制硬件,我们编写了在现场可编程门阵列和计算机上运行的软件。为了在皮质中感应所需的电场,我们开发了一种优化方法来计算线圈中所需的电流。我们对 mTMS 系统进行了描述,并对一名健康志愿者进行了概念验证运动映射实验。在运动映射中,我们保持换能器位置固定,同时以电子方式移动中央前回上的电场最大值并测量对侧手的肌电图。
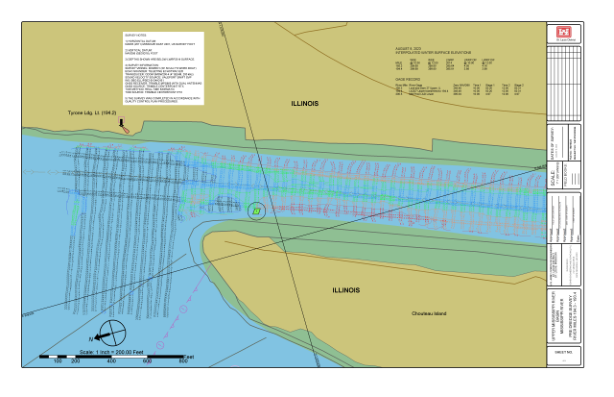
测量说明: - 1) 水平基准
2023 年 8 月 8 日 — 4) 调查信息:调查船:BOWEN1(24' SCULLY 工作船)。回声测深仪:TELEDYNE ECHOTRAC E20。换能器:ODOM SMSW200-4(4° 波束,200 kHz)。