XiaoMi-AI文件搜索系统
World File Search SystemTrim
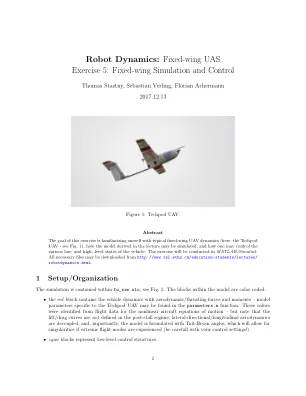
固定翼仿真与控制 - 机器人动力学
任务 2:是否可以选择一组手动控制偏差(和油门设置)来稳定机身 x 轴空速分量 u =13 m s − 1 的开环直线、水平和稳定飞行?如果可以,将控制信号(标准化)设置记录为微调,记录在初始条件向量以及低级控制块(u E 、u A 、u R )和高级控制块(u T )中。这些将作为下一步控制器设计的微调偏差。蓝色的配平用户输入块采用标准化值,即 ∈ [ − 1 , 1]。不必担心获得完美的配平 - 因为我们稍后可能会对其进行改进。进一步记录稳定状态俯仰角 θ - 将此量输入高级控制块的“θ 配平”用户输入源以及“姿态模式开关”左侧的“用户姿态设定点”块。

APU 维护和维修 - AviTrader
波音公司已选择 UTC 航空航天系统公司为其新型波音 777X 大型双引擎喷气式飞机提供另外三个系统。这些系统是 UTC 航空航天系统公司在 2015 年获得的飞机众多系统的补充。UTC 航空航天系统公司现在还将提供水平稳定器配平执行器,该执行器可移动水平稳定器,以在飞行过程中配平和稳定飞机的俯仰轴。这个飞行关键部件是 777X 飞行控制系统的一部分,由 UTC 航空航天系统的 Ratier- Figeac 子公司开发,是一种基于实地验证技术的先进设计。此外,UTC 航空航天系统公司还被选中为 777X 提供地面机动摄像系统 (GMCS) 和近距离传感器数据集中器 (PSDC)。GMCS 通过为飞行员提供前起落架、主起落架和翼尖区域的视频和摄像头视图来增强态势感知能力
APU 维护和维修 - AviTrader
波音公司已选择 UTC 航空航天系统公司为其新型波音 777X 大型双引擎喷气式飞机提供另外三个系统。这些系统是 UTC 航空航天系统公司在 2015 年获得的飞机众多系统的补充。UTC 航空航天系统公司现在还将提供水平稳定器配平执行器,该执行器可移动水平稳定器,以在飞行过程中配平和稳定飞机的俯仰轴。这个飞行关键部件是 777X 飞行控制系统的一部分,由 UTC 航空航天系统的 Ratier- Figeac 子公司开发,是一种基于实地验证技术的先进设计。此外,UTC 航空航天系统公司还被选中为 777X 提供地面机动摄像系统 (GMCS) 和近距离传感器数据集中器 (PSDC)。GMCS 通过为飞行员提供前起落架、主起落架和翼尖区域的视频和摄像头视图来增强态势感知能力

附件 - 会议
背景/分析:Lakeshore Community Health Care 计划在其位于 1721 Saemann Avenue 的物业上建造一个新的车库/仓库。申请人对该项目陈述如下: • 新的车库/仓库面积为 1,410 平方英尺(30 x 47),并将铺设新路面(从车库铺设到现有小巷,重新配置沥青车道和混凝土人行道)。• 车库对于 Lakeshore Community Health Care 的日常运营必不可少,包括车辆存储(否则将位于停车场)以及必要的医疗、牙科和行政用品的批量存储。该建筑还应满足任何短期存储需求。• 拟议的外观设计和材料将与最近的建筑增建/改造相匹配。这将包括使用灰色 LP 智能壁板/装饰、铝制窗户和空心金属门。灰色壁板也是对位于 Saemann 和 17 街东北角的现有房屋的一个很好的补充。• 拟建的车库将是木框架结构,带有单坡膜屋顶。外部饰面将是预制装饰和壁板,颜色与现有设施相匹配。将使用与现有设施相匹配的铝制固定窗户、空心金属面板和框架走道门,以及从现有建筑中重复使用的现有钢制高架门。将使用预制金属排水沟和落水管以及预制金属装饰包来匹配现有设施。所有新材料将与相邻现有设施使用的材料相同,以使拟建建筑与现有设施相得益彰。

固定翼性能 - USNTPS 校友会
1.7 性能飞行测试条件和飞行员技术 1.11 1.7.1 姿态飞行 1.11 1.7.2 配平镜头 1.12 1.7.3 测试条件 1.12 1.7.4 稳定平衡条件 1.13 1.7.5 不稳定平衡条件 1.13 1.7.6 非平衡测试点 1.14 1.7.7 能量管理 1.15
固定翼性能 - USNTPS 校友会
1.7 性能飞行测试条件和飞行员技术 1.11 1.7.1 姿态飞行 1.11 1.7.2 配平镜头 1.12 1.7.3 测试条件 1.12 1.7.4 稳定平衡条件 1.13 1.7.5 不稳定平衡条件 1.13 1.7.6 非平衡测试点 1.14 1.7.7 能量管理 1.15
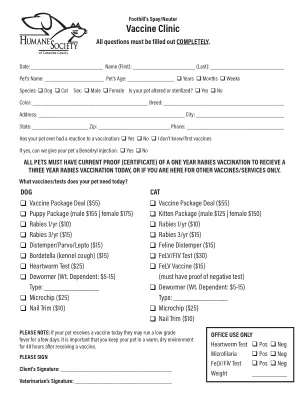
疫苗诊所 - 卡托巴县人道协会
疫苗套餐($55) 小猫套餐(公猫$125 | 母猫$150) 狂犬病 1/年($10) 狂犬病 3/年($15) 猫瘟热($15) FeLV/FIV 检测($30) FeLV 疫苗($15)(必须有阴性检测证明) 驱虫药(重量依赖:$5-15) 类型:______________ 微芯片($25) 指甲修剪($10)

17194 联邦公报 / 第 60 卷,第 65 期 / 1995 年 4 月 5 日星期三 / 规则和条例
是 6 叶 Dowty Rotol 后掠形螺旋桨。单个控制杆控制每个螺旋桨/发动机组合。尾部将安装辅助动力装置 (APU)。该飞机可容纳两名飞行员、一名观察员、两名乘务员、行李架、卫生间,并可安装厨房。有一个前后储物舱和一个后货舱。飞机的最大运行高度为 31,000 英尺。萨博 2000 具有全液压电子控制方向舵,并将具有全液压电子控制升降舵作为后续设计修改。动力升降舵控制系统 (PECS) 提供左右升降舵表面的控制和动力驱动。PECS 还提供飞机稳定性增强和配平功能。拟议的升降舵系统在许多方面与方向舵设计相似,由模拟和数字电路混合组成,没有机械备份。控制柱与线性可变差动传感器 (LVDT)、操纵杆阻尼器、自动驾驶伺服器、带断开装置的线性弹簧相连,并与电子断开装置互连。与控制柱相连的位置传感器 (LVDT) 向两个电动升降控制装置 (PECU) 提供信号。每个 PECU 通过两个独立的伺服执行器通道 (SAC) 控制两个升降舵伺服执行器 (ESA)。每个 SAC 细分为一个主控制通道和一个监控通道。四个 ESA 中的两个由一个 PECU 控制,用于定位一个升降舵侧。ESA 有两种操作模式,主动和阻尼。当 PECU 的模式控制电流和液压可用时,将产生主动模式。一个主动伺服执行器足以操作升降舵表面。升降舵伺服执行器阀门和执行器柱塞位置反馈由位置传感器 (LVDT) 提供。PECU 通过配平继电器和两个数字空气数据计算机连接到一台飞行控制计算机。飞行控制计算机还向自动驾驶伺服器提供信号。操纵杆到升降舵的传动装置是指示空速 (IAS) 的功能。配平和稳定性增强基于 IAS、垂直加速度和襟翼位置。操纵杆、配平和升降舵的位置和状态信息被传送到发动机

iEFIS Explorer 简介 - MGL Avionics
SP-7 “CAN” AHRS(最多可连接 4 个以实现冗余,但每个 iEFIS 也能够根据精确的 GPS 测量显示地平线)。SP-6 “CAN” 指南针(最多可连接两个指南针系统)。RDAC XF 和 RDAC XF MAP – MGL 的新型发动机监视器。最多可连接 4 个,这意味着您可以监控最多 4 个发动机(包括涡轮机)。MGL 伺服 – 基于 CAN 的伺服兼容,在此阶段最多可连接三个(倾斜、俯仰和偏航)。MGL V6 和 MGL V10 VHF COM 无线电。这些完全兼容。最多可连接两个,并从任何 iEFIS 面板进行控制。MGL/Garrecht 模式-s 转发器。此远程安装转发器可由 iEFIS 面板完全控制。MGL 导航无线电。双 VOR、ILS、下滑道和标记接收器(目前正在开发中)。MGL 襟翼/配平电机控制器。此基于 CAN 的接口可直接驱动直流电机以控制襟翼和配平。