XiaoMi-AI文件搜索系统
World File Search SystemUAM
máster伊拉斯mus mundus在人工智能中用于图像...
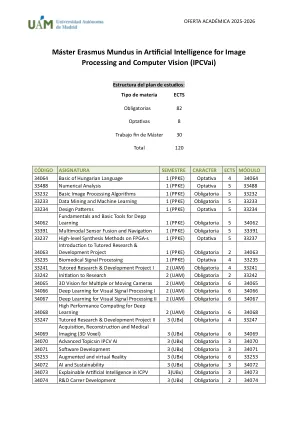
辅导研究与开发项目1(PPKE)义务2 34063 33235生物医学信号处理1(PPKE)Optativa 4 33235 33235 33241辅导研究与发展项目I 2(UAM)启动4 33241 33241 33241 33241 IDEVITIA或移动摄像机2(UAM)义大肌6 34065 34066视觉信号处理深度学习I 2(UAM)义务肌6 34066 34067视觉信号处理的深度学习II 2(UAM)dompotoria 6 34067辅导研究与开发项目1(PPKE)义务2 34063 33235生物医学信号处理1(PPKE)Optativa 4 33235 33235 33241辅导研究与发展项目I 2(UAM)启动4 33241 33241 33241 33241 IDEVITIA或移动摄像机2(UAM)义大肌6 34065 34066视觉信号处理深度学习I 2(UAM)义务肌6 34066 34067视觉信号处理的深度学习II 2(UAM)dompotoria 6 34067

城市空中交通用户体验研讨会 - 乌尔姆大学
城市空中交通 (UAM) 有望通过在城市和城区周围提供空中旅行服务,为新的出行体验铺平道路。然而,很少有研究从交通体验的角度得出用户的需求和要求。因此,我们提出了一个互动研讨会,讨论人们在积极体验 UAM 时的期望。我们想延续在 AutomotiveUI 2021 上举行的先前研讨会,该研讨会将继续讨论不同类型的 UAM 操作的用户体验。研讨会包括主题演讲、立场文件演示和互动小组讨论,目标如下:1) 了解 UAM 在未来交通中的作用,2) 了解人们在使用 UAM 时对交通旅程的期望,3) 收集设计考虑因素以支持 UAM 中的交通旅程。

对自动城市空中交通信任的客观检测
摘要:城市空中交通(UAM)应运而生,以应对日益增长的交通需求。由于 UAM 涉及复杂城市地区的商业飞行,成熟的自动化技术对于确保安全、便捷和可靠的飞行至关重要。然而,目前人们对自动化的接受程度还不够。因此,本研究试图客观地检测人类对 UAM 自动化的信任程度。使用脑电图(EEG)信号,特别是事件相关电位(ERP),来分析和检测操作员对自动化 UAM 的信任,从而深入了解与信任相关的认知过程。还建立了集成注意力机制的二维卷积神经网络(2D-ACNN),以便通过 EEG 信号实现端到端的信任检测。结果表明,我们提出的 2D-ACNN 优于其他最先进的方法。这项工作有助于提高 UAM 自动化的可信度和普及度,这对于 UAM 领域的广泛采用和进步至关重要。

从本体到系统体系结构
Urban Air Mobility(UAM)是通过涉及各种相互关联系统的系统(SOS)实现的先进航空概念。基于模型的系统工程(MBSE)非常适合定义此类SOS的体系结构。但是,尽管UAM SOS有一些共同的基本特征,但特定的体系结构和操作参数将从一个都会区变成另一个都会区。在每个都会区的UAM体系结构和运营的适当模型可能会导致不一致,混乱,并最终导致操作困难。为了防止这种结果,本文提出了一个结构化框架,用于利用本体论和参考模型来阐述UAM体系结构。这些用于得出Metro-rarea-特定的架构和操作模型。本体论统一了对UAM SOS中系统,关系和过程的理解。以本体论为基础,基线档位的参考模型是地铁区特异性建筑模型的模板。组合有助于快速生成特定的UAM架构和用例,如本文所示。我们总结了为什么专门为UAM准备的完全模块化和可重复使用的框架这一步骤可以加速进步,以实现这一雄心勃勃的概念。

基于人工智能的民用城市空中交通探索性网络物理安全分析框架
摘要:城市空中交通 (UAM) 已成为服务于智能公民的潜在文明候选者,例如通过送货、监视和空中出租车。然而,由于商用 UAM 使用公开可用的通信基础设施,这增加了干扰和欺骗攻击以窃取或撞毁 UAM 中的飞行器的风险,因此安全问题日益严重。为了保护商用 UAM 免受网络攻击和盗窃,本文提出了一种基于人工智能 (AI) 的探索性网络物理安全分析框架。所提出的框架设计了基于监督学习的 AI 方案,例如决策树、随机森林、逻辑回归、K 最近邻 (KNN) 和长短期记忆 (LSTM),用于预测和检测网络干扰和欺骗攻击。然后,开发的框架基于控制消息之间的皮尔逊相关系数分析条件依赖关系,以根据 AI 算法的结果查找潜在攻击的原因。本研究将 UAM 姿态控制场景作为确定干扰和欺骗攻击的用例,以使用最先进的无人机攻击数据集验证所提出的框架。实验结果表明,所提出的框架的有效性,使用决策树、随机森林和 KNN 进行干扰和欺骗检测的准确率约为 99.9%,同时有效地找到攻击的根本原因。

探索城市空中交通运营的人为因素问题
文献中将其视为空域的新进入者。虽然引入 UAM 可能带来重大好处,但也可能对当前的空中交通管理系统产生根本性改变。目前正在探索几种概念,以便为近期、中期和远期运营开发安全高效的 UAM 系统。近期运营的运营概念提出了几种假设。空中交通管制员等人类操作员的角色和职责概念提出了不同程度的参与。因此,识别和探索人为因素问题是概念发展的关键下一步。使用人在环空中交通管制模拟来研究 UAM 交通密度和当前空域路线和通信程序变化对主观管制员工作量和效率相关任务绩效的影响。研究结果表明,虽然主观工作量对于低密度运营来说是可控的,但中密度和高密度运营导致工作量难以管理,导致拒绝让更多车辆进入受控空域。通过实施协议书,口头沟通减少,这与工作量减少有关。优化路线还与减少工作量和提高性能效率有关。虽然这些调整可以积极支持管制员的表现,但工作量仍然

NASA 概念飞行器和先进空气工程...
摘要 NASA 正在对先进空中机动 (AAM) 飞机和操作进行调查。AAM 任务的特点是航程低于 300 海里,包括乡村和城市运营、载客和货运。城市空中机动 (UAM) 是 AAM 的一个子集,是预计具有最大经济效益且最难开发的部分。NASA 革命性垂直升力技术项目正在开发 UAM VTOL 飞机设计,可用于集中和指导研究活动,以支持新兴航空市场的飞机开发。这些 NASA 概念车涵盖了相关的 UAM 功能和技术,包括推进架构、高效而安静的转子以及飞机空气动力学性能和相互作用。采用的配置是通用的,在外观和设计细节上有意与著名的行业安排不同。这些 UAM 概念飞机已用于众多工程研究,包括满足安全要求、实现良好的操控品质以及将噪音降低到直升机认证水平以下的工作。重点关注概念车辆,对先进空中机动飞机的工程进行了观察。
美国宇航局概念车和先进空中机动飞机工程
摘要 NASA 正在对先进空中机动 (AAM) 飞机和操作进行研究。AAM 任务的特点是航程低于 300 海里,包括乡村和城市操作、载客和货运。城市空中机动 (UAM) 是 AAM 的一个子集,是预计具有最大经济效益且最难开发的部分。NASA 革命性垂直升力技术项目正在开发 UAM VTOL 飞机设计,可用于集中和指导研究活动,以支持新兴航空市场的飞机开发。这些 NASA 概念飞行器涵盖了相关的 UAM 功能和技术,包括推进架构、高效而安静的转子以及飞机空气动力学性能和相互作用。所采用的配置是通用的,在外观和设计细节上有意与知名的行业安排不同。这些 UAM 概念飞机已经用于许多工程研究,包括满足安全要求、实现良好的操纵品质以及将噪音降低到直升机认证水平以下的工作。以概念车为重点,对先进空中机动飞机的工程进行了观察。
新加坡城市空中交通启动——路线图
城市空中交通 (UAM) 是一种新型交通方式,它使用电动垂直起降 (eVTOL) 飞机在城市和郊区运送人员和货物。由于道路越来越拥挤以及城市化带来的空气污染,这种安全高效的航空运输系统引起了越来越多的关注。巴黎、洛杉矶和东京等城市正在积极制定战略,将 UAM 整合到其交通系统中。新加坡是这项激动人心的技术的早期采用者。自 2017 年以来,在与新加坡当局进行了多次成功会谈后,UAM 的先驱 Volocopter 于 2019 年 10 月进行了历史性的首飞,突显了新加坡积极的工作关系和进展。在实现这一里程碑之前,Volocopter 在实里达机场进行了广泛的测试,并与交通部 (MOT)、新加坡民航局 (CAAS) 和经济发展局 (EDB) 等几个关键利益相关者密切合作。 2019 年 10 月 22 日,Volocopter 在新加坡标志性的滨海湾上空成功完成了亚洲首次载人 eVTOL 飞行。这为体验 UAM 的外观和声音提供了独特的机会。此次试飞验证并展示了 Volocopter 在将商业空中出租车服务引入新加坡方面取得的进展。这也表明狮城有意成为 UAM 集成领域的领导者,彻底改变我们的生活、工作和生活。

案例研究 - 3D 打印更好的捕鼠器
超声波增材制造 (UAM) 是一种混合 3D 金属打印技术,它使用高频超声波振动将金属箔摩擦在一起,逐层堆积金属,形成选择性加工的净形状。UAM 打印头集成到标准 CNC 加工中心中,共同形成混合增材制造工艺。通过增材和减材工艺,UAM 可以生产复杂的内部几何形状,而这些几何形状仅靠传统制造是无法复制的。此外,超声波连接是一种固态工艺,可以直接打印“难以加工”的铝合金,例如 6061 和 7075。由于该工艺不会将金属加热到超过 250°F(远低于熔化温度),因此可以保留进料的化学性质、晶粒结构和材料特性。