XiaoMi-AI文件搜索系统
World File Search SystemUAV

UAV
日本土地,基础设施,运输和旅游部的Tetsuro Imakiire地理空间信息授权,日本伊巴拉基市的Tsukuba City,日本的地理空间信息局(GSI)自1996年以来,GEONET,GEONET,GEONET,GEONET,GEONET,GEONET。GSI逐渐更新了Geonet的系统,升级使Geonet能够接收越来越多的信号。GNSS的观察数据,包括GPS,QZSS和GLONASS在内,自2012年7月以来已向用户公开开放。在定义,维护和提供地球参考框架和位置信息方面的最高表现使Geonet成为土地调查的必不可少的基础设施,而且对日本的地理空间信息管理和地壳变形监测也是如此。

微型无人机 - CRPF
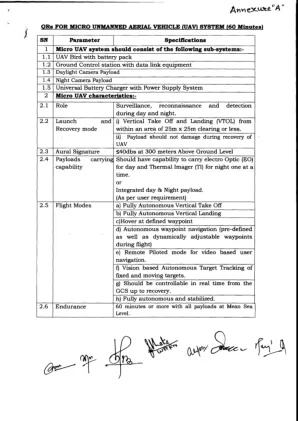
crpf.gov.in › writereaddata › images › pdf PDF 2022年10月16日 — 2022年10月16日 触摸屏。峰值利用率下至少 02 小时。应少于 3.5 小时。用于将数据传输到外部辅助存储设备的端口。13 页

无人机工艺 - Presagis
控制和管理站由两部分组成:发射和过程控制,以及教员操作员站 (IOS)。过程实用程序管理器启动所有站点上的所有过程并监控模拟器的健康状况。IOS 旨在协助教员控制模拟训练环境并监控模拟器中飞行员/机组人员表现的所有方面。教员可以控制和监督所有功能,例如观察员的视角、无人机位置和系统、气象、环境、控制战术和技术飞行方面的场景。示例 3D 地形数据库包含对象和兴趣点,包括道路、河流、海岸线、建筑物、海洋、植被、电网和机场。
NEO-M8P - Mugin 无人机
在默认配置下,NEO-M8P 流动站将尝试根据收到的校正数据提供最佳定位精度。一旦收到 RTCM 3 消息的输入流,它将进入 RTK 浮动模式。一旦流动站解决了载波相位模糊度,它将进入 RTK 固定模式。当流动站处于 RTK 固定模式时,相对精度可以预期精确到厘米级。通常需要至少 2 分钟,流动站才能解决载波模糊度并从 RTK 浮动模式转到 RTK 固定模式。此时间段的长度称为收敛时间。

20 世纪 20 年代的无人机
a 特温特大学,地理信息科学与地球观测学院 (ITC),P.O.荷兰恩斯赫德 217 号信箱 b 约克大学拉松德工程学院地球与空间科学与工程系,4700 Keele St,多伦多,安大略省,加拿大 c 斯图加特大学摄影测量研究所 (ifp),Geschwister-Scholl-Stra ße 24 D,70174 Stuttgart,德国 d 日内瓦大学日内瓦经济管理学院 Uni Mail,40, Boulevard du Pont-d ’ Arve,1211 Gen ` eve,瑞士 e 不伦瑞克工业大学大地测量与摄影测量研究所,Bienroder Weg 81,38106 Braunschweig,德国 f 芬兰国家土地测量局,芬兰地理空间研究所 FGI,遥感与摄影测量系,P.O.信箱 84,FI-00521 赫尔辛基,芬兰 g 阿尔托大学,建筑环境系,埃斯波,芬兰 h ' 洛桑联邦理工学院 (EPFL),大地测量工程实验室,1015,瑞士
无人机系统:全球评论
空中发射 - 载人飞机 - 气球 Zephyr QinetiQ - 履带式翼伞 Exdrone BAI Aerosystems - UAV (Predator) Finder NRL 蹦极绳(手动张紧) DragonEye AeroVironment 罐式发射(手持) - Black Widow AeroVironment - MATE Dutch Space 汽车/卡车发射 - Aerosonde Aerosonde - Snow Goose MMIST 集装箱发射 - 气动 Neptune DRS Technologies - RATO KZO Rheinmetall DE 手动发射 - Aladin EMT - Carolo Mavionics - 追踪器 EADS D&SS 发射器 - 蹦极 LUNA EMT - 液压 Phoenix BAE Systems - 气动 Sperwer Sagem - 大气 Vulture Mk II ATE RATO(火箭辅助起飞) Pioneer Pioneer UAV Inc 武器发射 正在开发中鱼雷管发射 正在开发中 轮式起飞 - 捕食者 通用原子公司 AS - 全球鹰 诺斯罗普·格鲁曼公司 VTOL RMax 雅马哈发动机公司

全向变形多旋转无人机
摘要本文在第一次介绍了我们称为Omnimorph的新型变形多旋翼无人驾驶飞机(UAV)的设计,建模和控制。变形能力允许选择优化能源消耗的配置,同时确保对所需任务的所需可操作性。可以在标准的点对点位移期间使用最能量的单向推力(UDT)配置。完全发射(FA)和全向(OD)配置可用于全姿势跟踪,例如,例如,当场恒定的态度水平运动和全旋转,用于全扳手6D相互作用控制和6D干扰拒绝。使用单个伺服电机可获得变形,从而可以最大程度地减少体重,成本和维持复杂性。研究了致动属性,并在现实的模拟中提出并验证了妥协和控制工作之间的最佳控制器。提出了原型的初步测试,以评估螺旋桨的相互空气动力学干扰。

值得信赖的无人机关系:将模式动作世界分类法应用于无人机和无人机群歌剧
摘要 人为因素在航空电子系统的开发和集成中发挥着重要作用,以确保它们值得信赖并能有效使用。随着无人驾驶飞行器 (UAV) 技术对航空领域变得越来越重要,这一点也确实如此。本研究旨在通过利用流行的航空访谈方法(图式世界行动研究方法)结合从文献中确定的关于信任的关键问题,了解无人机操作员在驾驶无人机时的信任要求。对六名拥有不同经验的无人机操作员进行了访谈。这确定了过去的经验对信任的重要性以及操作员的期望。除了可以帮助开发值得信赖的系统的设备、程序和组织标准之外,还提出了针对培训以积累经验的建议。所开发的方法有望在人机交互中获得信任。