XiaoMi-AI文件搜索系统
World File Search SystemUDP

流体剪切应力刺激 ATP 释放,而不调节肾内髓集合管中的嘌呤基因表达
缩写:ADPKD,常染色体显性多囊肾病;BB-FCF,亮蓝-FCF;CCD,皮质集合管;COX-2,环氧合酶-2;CX30,连接蛋白-30;CX30.3,连接蛋白-30.3;CX37,连接蛋白-37;DCPIB,4-(2-丁基-6,7-二氯-2-环戊基-茚满-1-酮-5-基)氧代丁酸;DCT,远曲小管;DTT,二硫苏糖醇;ENaC,上皮钠通道;GFR,肾小球滤过率;Gjb4 -/-,Gjb4 敲除;IMCD,内髓集合管;LRRC8,含 8 个富亮氨酸重复序列;Na +,钠;PBS,磷酸盐缓冲溶液; PC1,多囊蛋白-1;PC2,多囊蛋白-2;Pkd1 -/-,Pkd1 敲除;SDS,十二烷基硫酸钠;sgRNA,单向导 RNA;TBS,三羟甲基氨基甲烷缓冲溶液;TGF,管球反馈;UDP,尿苷二磷酸;VNUT,囊泡核苷酸转运蛋白;VRAC,容量调节阴离子通道;WT,野生型。

技术论文 - 使用 IETF QUIC 加速...
QUIC 是 Google 于 2013 年首次发布的传输层协议(称为 gQUIC),旨在替代 TCP/TLS 以加速 HTTP 流量。该协议通过 UDP 工作,具有低延迟连接建立和数据传输、易于部署、多路复用以及增强的安全性等特点。经过多年的实验,互联网工程任务组 (IETF) 采纳了这个想法,并将其发展为一个全面的规范,IETF QUIC 于 2021 年正式发布为 RFC9000。HTTP/3 的 RFC9114 将于次年基于 QUIC 发布。有多个 SSL 库,包括 BoringSSL、OpenSSL 的变体、NSS 等,它们与各种 QUIC 传输实现相结合,为 Web 服务器或客户端中的 HTTP/3 提供支持。继基于 OpenSSL 的异步 NGINX 加速 [1] 之后,本文重点介绍 NGINX-QUIC 与 BoringSSL 库的加速。它强调了基于 OpenSSL 的 TLS 和基于 BoringSSL 的 QUIC 之间的区别,探讨了异步英特尔® QAT 加速与 NGINX-QUIC 的设计和使用,以提供低连接建立延迟和高性能。
fortiproxy 7.6.1发行说明
Change log 4 Introduction 5 Security modules 5 Caching and WAN optimization 6 What's new 7 ZTNA support for UDP traffic 7 Enhancements to the policy list 7 New log fields for long-live sessions 8 Multiple explicit proxies in a policy 8 IP based user authentication through portal authentication without HTTP redirection 10 Customizable syslog format option 10 Use a static client certificate for SSL/SSH inspection 10 Header replacement in web-proxy profile 11 Add license information in SNMP 12 Support for Google Cloud HSM 12 Improved certificate management in cloud infrastructure 12 SR-IOV support on Hyper-V 12 CLI changes 12 Product integration and support 14 Deployment information 16 Downloading the firmware file 16 Deploying a new FortiProxy appliance 16 Deploying a new FortiProxy VM 16 Upgrading the FortiProxy 16 Downgrading the Fortiproxy 18解决问题20已知问题24 Fortinbi 24

为虚拟现实应用构建自定义实时传感器
在虚拟现实 (VR) 中,实时运动跟踪对于虚拟场景和现实世界之间的同步至关重要。然而,由于特定设备的可用性有限,并且现有跟踪设备的成本通常很高,这可能会阻止更多人有机会使用 VR 技术。在本论文中,我探讨了将特定传感器配置连接到 VR 应用程序的过程,以便能够根据特定应用程序定制运动传感器,而不必依赖通常不符合应用程序需求的解决方案。MPU-6050 传感器非常精确,因为它每个通道都包含 16 位模拟到数字转换硬件。因此,它可以同时捕获 x、y 和 z 通道。传感器使用 I2C 总线与 Arduino 接口。Arduino Ethernet Shield 利用 UDP 通信协议为我们提供了一种方便的方式来实现 Arduino 与任何所需软件应用程序之间的交互。最后,进行了三个实验来演示虚拟环境下实时仿真的应用,结果表明这项工作可以为 VR 应用提供实时准确的运动跟踪。
Inspire,Likelika
1。Abdo Gaber,Ali M. Alsaih,Abbas Omar“基于IEEE 802.11ac” 03/2014的高分辨率无线室内定位的UDP标识;在:2014年定位,导航和通信的第11届研讨会上(WPNC'14),德国德累斯顿2。Ali Manea,Sahar Budultive和Nada al-Moayad,Mohamed G. Bingabr“一种预测认知无线电网络中渠道参数的新方法”第25届国际工业和工程计算机应用国际会议2012年(Caine-2012)。3。nada al-Moayad,Sahar Abdultive,Ali Manea,“机会频谱模型中通道参数的准确估计算法” 2010年第三届国际高级计算机理论与工程学会议(ICACTE),V6-100- V6-100- V6-103。4。nada al-Moayad,Sahar Abdultive,Ali Manea,“机会频谱模型中通道参数的准确估计算法” 2010年第三届国际高级计算机理论与工程学会议(ICACTE),V6-100- V6-100- V6-103。5。Ali Ramadan,A。-Alsaih,A。-Khanzada,T.J。 -Macháč,J。-Abbas,O。,

一种用于验证小型卫星联合作战的并行测试设施方法
摘要:联合远程实验室允许在场外进行实验。多个实验室的协调可用于同时进行联合空间操作实验。但是,设施之间的通信延迟对于执行足够的实时实验至关重要。本文介绍了一种在两个远程实验室的浮动平台之间进行协调实验的方法。为此建立了两个独立设计的平台,一个在吕勒奥理工大学,另一个在罗马大学。创建了一种基于简单网络时间协议的同步方法,允许测量代理之间的偏移和延迟。两个平台通过互联网上的 UDP/IP 协议交换有关其测量时间和姿势的数据。通过执行模拟操作验证了该方法。还进行了第一次演示实验,展示了实现领导者/追随者协调操作的可能性。模拟和实验的结果显示通信延迟在几十毫秒的数量级上,对控制性能没有显着影响。因此,事实证明,所建议的协议适用于在远程实验室之间实时开展协调实验。
计算机科学与工程学院
3。计算机编程和数据结构和算法编程在C,面向对象的编程,阵列,堆栈,排队,链接列表,树,搜索排序技术,哈希和图形。渐近最差的情况和空间复杂性。算法设计技术:贪婪,动态编程和分裂和概述。图形搜索,最小跨越树和最短路径。5。操作系统过程,线程,过程间通信,并发和同步。僵局。CPU计划。内存管理和虚拟内存。文件系统。6。数据库ER -MODEL。关系模型:关系代数,元组演算,SQL。完整性约束,正常形式。文件组织,索引(例如B和B+树)。交易和并发控制。6。数据通信和计算机网络模拟和数字信号,信号特征,多路复用技术,通信通道,开关技术。概念分层。LAN Technologies(以太网)。流量和错误控制技术,切换。IPv4/ipv6,路由器和路由算法(距离向量,链接状态)。TCP/UDP和插座,拥塞控制。应用程序层协议(DNS,SMTP,POP,FTP,HTTP)。
PALO ALTO Networks PA-400系列,PA-800系列,PA-1400系列,PA-3200系列,PA-3400系列,
HMAC Hashed Message Authentication Code HTTPS Hypertext Transfer Protocol Secure ICMP Internet Control Message Protocol IKE Internet Key Exchange IP Internet Protocol IPv4 Internet Protocol version 4 IPv6 Internet Protocol version 6 IPsec Internet Protocol Security MP Management Plane NAT Network Address Translation NIST National Institute of Standards and Technology PP Protection Profile REST Representational State Transfer RSA Rivest, Shamir and Adleman (algorithm for public-key cryptography) SA Security Association SAR Security Assurance Requirement SFR Security Functional Requirement SHA Secure Hash Algorithm SSH Secure Shell SSL Secure Socket Layer ST Security Target TLS Transport Layer Security TOE Target of Evaluation TSF TOE Security Functions UDP User Datagram Protocol URL Uniform Resource Locator VLAN Virtual Local Area Network VM Virtual Machine VPN Virtual Private Network VPNGW Virtual Private Network Gateway

TELKOMNIKA 电信计算电子和控制
在人机交互中,传感器对于保证实时应用中的稳定性和高性能至关重要。尽管如此,机器人的精确便携式传感器通常成本高昂,而且使用免费软件处理信号的灵活性很低。因此,我们提出了一种可穿戴传感器网络来测量人机交互系统中的下肢角位置。实现该目标的方法包括使用低成本设备实现无线网络、验证设计要求以及通过概念验证进行验证。设计网络的要求包括低信息丢失、实时通信和传感器融合,以使用陀螺仪和加速度计估计角位置。因此,开发的传感器网络具有基于 ESP8266 微控制器的客户端-服务器架构。此外,该网络使用标准 802.11 b/g/n 来传输角速度和加速度测量值。此外,我们实现了用户数据报协议 (UDP) 协议,以 10 毫秒的采样时间实时运行。最后,我们实施了概念验证以显示系统的有效性。因此,我们使用卡尔曼滤波器来估计脚、小腿、大腿和臀部的角度位置。结果表明,实施的传感器网络适用于实时机器人应用。
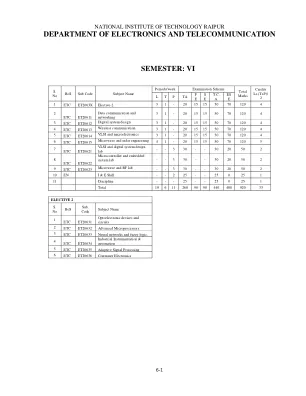
国家理工学院赖布尔电子和电信学期:VI
NATIONAL INSTITUTE OF TECHNOLOGY RAIPUR DEPARTMENT OF ELECTRONICS AND TELECOMMUNICATION Semester: 6 Code: ET20611 Subject: Data Communication and Networking Credits: 4 Total Theory Periods: 30 Total Tutorial Periods: 10 UNIT I INTRODUCTION TO INTERNET: Network edge, end systems, clients, servers, connectionless and connection oriented services, Network code, Access networks, ISPs and internet backbone, Delay and loss in packet switched network.分层体系结构:协议服务和分层,OSI参考模型,TCP/IP的概述,Berkeley API,C中的介绍性套接字编程,应用程序层协议和TCP/IP UTILITION。单元II数据链接层:点对点协议和服务模型,ARQ协议和可靠的数据传输服务,停止和等待,Go-back-N,选择性重复,滑动窗口流量控制,同步服务的时机恢复,TCP可靠的流服务和流量控制。数据链接控件:框架,HDLC数据链接控制,使用数据包多路复用器共享链接共享。单元III中型访问控制:随机访问,Aloha,插槽Aloha,CSMA,CSMA CD,调度方法的调度方法,用于中等访问控制,预订系统,投票,通过标记戒指,比较,MAC的延迟性能:频道的性能:频道的性能与爆发的交通,投票和随机访问,随机访问,随机访问,随机访问和CSMACD。局部网络:LAN协议,以太网,令牌环,无线LAN和IEEE 802.11标准。教科书:1。通讯网络,第2版,莱昂·加西亚(Leon-Garcia),i widjaja,麦格劳山(McGraw Hill)教育印度。2。计算机网络:上自上而下的方法,第5版,J F Kurose,K W Ross,Pearson Education。3。2。单元IV数据包交换网络:数据包网络拓扑,数据报和虚拟电路,数据包网络中的路由,最短路由路由,ATM网络,数据包级别的流量管理,流量管理处的流量管理,流量级别,流量管理级别的流量管理。单元V TCP/IP:体系结构和协议,IP数据包,地址,子网,IP路由,CIDR,地址分辨率,反向地址分辨率,碎片和重新组装,ICMP,IPV6,UDP,UDP,传输控制协议,Internet路由协议,Multicast路由协议,DHCP,NAT和移动IP。Behrouz A. Forouzan,“数据通信和网络”,Tata McGraw-Hill,2004年。参考书:1。数据网络,2 ED,D P Bertsekas,R G Gallagar,Prentice Hall。计算机和通信网络的分析,F Gebali,Springer,2008年。