XiaoMi-AI文件搜索系统
World File Search SystemUGV

如何引用本文:Su M,Pu R,Wang Y,YuM。基于重新执行学习的多个无人车辆的协作攻城方法。 inte
提出了一种基于多机构增强学习的方法,以应对捕获无人接地车辆(UGV)的逃避焦油的挑战。最初,本研究介绍了针对合作UGV捕获的环境和运动模型,以及明确定义的直接捕获成功标准。将注意力集成到软演员批评(SAC)中的注意机制已杠杆化,将注意力集中在与任务有关的关键状态特征上,同时有效地管理较少相关的方面。这使捕获代理可以专注于目标代理的范围和活动,从而增强追求期间的协调和协作。关注目标代理的重点有助于完善捕获过程,并确保对价值功能的精确估计。多余的活动和不产生的场景的重新产生会增强效率和鲁棒性。此外,注意力加权动态适应环境变化。要解决在iOS中引起的有限激励措施 - iOS带有多个车辆捕获目标的动力,该研究引入了改进的奖励系统。它将奖励功能分为个人和合作组成部分,从而优化了全球和本地化的激励措施。通过Fa-Div>捕获UGV之间的合作协作,这种方法削弱了目标UGV的动作空间,从而成功地捕获了结果。与以前的SAC算法相比,提出的技术表明捕获成功增强。模拟试验和与替代学习方法的比较验证了算法的有效性和奖励函数的设计方法。

人工智能在跨平台定制 AR 数据中的作用
同时,目标的 AR 轮廓符号将基于 UGV 车载视觉传感器的点云,使用 AI 算法合成 AR 数据。AI 还可以执行以下功能:警告倾覆可能性、确定安全路径、检测突然出现的阻碍移动的威胁、标记需要特别注意的区域的视觉警告、分析土壤的高光谱图像以识别其表面的变化(这是简易爆炸装置或地雷的人工伪装的标志)、在自然景观背景下识别伪装。所有此类识别结果都将以 AR 符号的形式呈现。这种合成的 AR 符号可以在没有视频流的情况下发送给 MUM-T 内的指挥所操作员或其他车辆,以最大限度地减少流量,或者与预加载的 AR 符号结合使用以合并到完整视频流中。在这种情况下,有必要解决将车载 AR 数据生成工具与 UGV 架构集成的问题,并在它们与 BMS 的连接集中化程度方面找到一个折衷方案。在 MUM-T 内部这也非常重要。

2023 年 5 月 22-23 日 - Navy.mil
EOD 技术中心能力 ............. 小型机器人 (UGV)................................ Polestar:与行业合作........散装防区外识别系统..... SRSD 评估和 AoA.................... 爆炸物痕迹桌面检测..... 用于爆炸物痕迹的 TQC............地雷对抗措施.........................水下射击装置.................... CBP 车辆 X 射线.................................... 气枪、MK36 等.................... MMW 人员成像....................快速区域表面检测...............

对不同材料的影响测试对可投掷无人机的车轮的影响
(nust),Ceme,43701拉瓦尔品第,巴基斯坦摘要。可投掷的无人接地车辆重量轻,尺寸很小,易于部署和影响电阻式电阻,主要用于国内以及人类生命受到损害的军事用途,例如检查污水管道,搜索和救援行动等。主要挑战在考虑可抛出的UGV的同时,它是通过其材料特性可以看出的影响吸收能力。可抛出的UGV的车轮吸收了大部分影响,而不会损害内部结构。为了解决此问题,在ANSYS Workbench中设计和模拟了蜂窝结构的车轮。使用ANSYS Workbench中的显式动态分析工具对硫化橡胶和塑料复合PCTPE材料车轮进行了撞击。总变形,等效应力和应变结果在ANSYS的撞击测试中测试,该轴的撞击测试在混凝土表面中从10米高度下降,速度为14m/s。一种塑料复合材料PCTPE是3D打印的,并用于可投掷的无人接地车辆。关键字。无人接地车;复合材料;冲击测试; ansys;陆车;显式动态分析
性能指标智能系统 (PerMIS ...
目录 前言.................... ... . . . . . . . . . . . . . . . . . ix 计划委员会 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi 研讨会计划一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv 作者索引. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxi 致谢. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxiii 技术会议 TUE-AM1 测量和指标 用于评估户外感知传感器数据质量的视觉指标 [Christopher Brunner, Thierry Peynot] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 救援机器人新 UGV、UMV、UAV 和 HRI 标准提案 [Robin Murphy] . . . . . . . . . . . . . . .
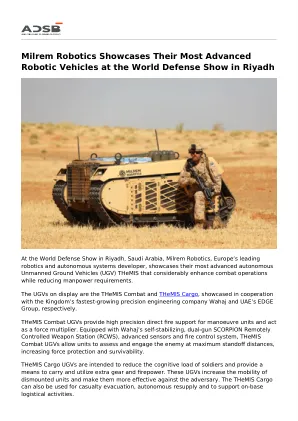
Milrem机器人技术在Riyadh举行的世界防御秀上展示了他们最先进的机器人车
Themis战斗UGV提供了对机动单位的高精度直接支撑,并充当力乘数。配备了Wahaj的自动稳定,双枪蝎子远程控制的武器站(RCWS),高级传感器和控制系统,Themis Combat combat ugvs允许UNITS允许单位在最大的支架距离内评估和吸引敌人,从而提高力量保护和增加。

禁止或限制使用……公约
我们还要强调的是,我们不愿意将政府专家组的讨论范围扩大到没有能力对人类造成严重伤害或死亡的自主系统。在这方面,“致命自主武器系统”中的“致命”和“武器”这两个术语至关重要。尽管我们认为,“致命”一词应作更宽泛的解释,即也包括武器可能造成的伤害、损坏和破坏。我们认为,政府专家组的工作不应侧重于非致命自主系统,包括但不限于非致命无人驾驶飞行器 (UAV)、非致命无人地面车辆 (UGV)、没有瞄准能力的无人机等。然而,讨论是否应侧重于具有越来越强自主性的巡飞弹药,这值得进一步分析。
无人系统路线图:2007-2032
随着国防部 (DoD) 在未来 25 年(2007 年至 2032 年)开发和使用日益复杂的无人系统部队,技术人员、采购官员和作战规划人员需要制定一个清晰、协调的无人系统技术发展和过渡计划。随着本文件的发布,UAS、UGV 和 UMS(定义为无人水下航行器 (UUV) 和无人水面航行器 (USV))的单独路线图和总体规划已被纳入全面的国防部无人系统路线图中。这份综合无人系统路线图是未来优先考虑和资助这些系统开发和技术的计划,从而确保国防部投资的有效回报。根据战略规划指导 (SPG),其总体目标是指导军事部门和国防机构以逻辑和系统的方式将适用的任务能力迁移到这一新型军事工具上。本路线图重点介绍了各种无人系统在技术和操作上支持的最紧迫的任务需求。在优先考虑未来无人系统技术的研究、开发和采购时,应考虑以下列出的这些需求,以确保国防部的投资获得有效回报。

中国和俄罗斯带来的现代威胁
纵观历史,军事冲突中哪一方拥有最先进的技术,哪一方就有可能在冲突中胜出,这往往是事实。世界大国一直在竞相成为技术最先进的国家,以便在发生武装冲突时,它们可能占据优势并取得胜利,或者至少获得安全。正是出于这个原因,美国关注监控外国的新兴技术。美国主要关注中国,因为中国被广泛认为是世界技术进步的领导者。尽管中国的技术进步涉及广泛的应用领域,但本文专门关注军事应用,或对美国构成最大威胁的应用。人工智能 (AI) 前景。由于中国未来对太空技术的军事应用的运营计划,太空资产是另一种来自中国的潜在威胁技术。俄罗斯也引起了美国的普遍关注,因为在过去的半个世纪里,俄罗斯已经成为全球研发强国。然而,值得注意的是,俄罗斯并不像中国甚至美国那么先进,但他们仍然专注于开发用于军事应用的人工智能技术;UGV(无人地面车辆)值得关注。

使用拓扑感知的非结构化环境中的移动机器人导航有效自适应状态晶格*
摘要 - 当代移动机器人导航架构采用计划算法提供单个最佳遵循路径的构建,在有动态和不确定的环境的情况下存在缺陷。随着环境的更新和机器人的起始状态发生变化,最佳计划通常会围绕离散障碍物进行,这对于遵循强烈有偏见的路径遵循计划的路线而言,这是有问题的。在本文中,我们重新制定了有效自适应状态晶格(EASL)所采用的搜索过程,以利用从观察到的环境中提取的同质类别。这种方法,我们称之为拓扑感知有效自适应状态晶格(TAEASL),使用多个数据结构来控制图中节点的扩展,以在图中提供多个最小成本计划,以在不同的同型类别中提供多个最小成本计划。受到任何时间修复a*的方法的启发,搜索继续进行,直到无法进行进一步的扩展或达到最大搜索时间为止。为了验证Taeasl在现场机器人技术中的效用,它在现实世界中的越野环境数据上进行了测试,该数据由Clearpath Warthog无人接地车辆(UGV)收集,并能够生成多个解决方案。本文以讨论包括高速越野移动机器人导航在混乱的障碍物场中的讨论结束。