XiaoMi-AI文件搜索系统
World File Search SystemUKF

混合状态估计:将物理信息的神经网络与动态系统的自适应UKF整合
摘要:在本文中,我们通过将物理知识的神经网络(PINN)与自适应的无气味卡尔曼过滤器(UKF)相结合,提出了一种新型的动态系统估计方法。认识到传统状态估计方法的局限性,我们通过混合损失功能和蒙特卡洛辍学来完善Pinn结构,以增强不确定性估计。使用自适应噪声协方差机制增强了无味的卡尔曼滤波器,并将模型参数纳入状态矢量以提高适应性。我们通过将增强的PINN与UKF集成为无缝的状态预测管道,进一步验证了该混合动力框架,这表明准确性和鲁棒性有了显着提高。我们的实验结果表明,位置和速度跟踪的状态估计保真度明显增强,并通过贝叶斯推理和蒙特卡洛辍学的不确定性定量支持。我们进一步扩展了对双摆系统的模拟并进行了评估,并在四轮驱动器无人机上进行了状态估计。这种综合解决方案有望推进动态系统估计中的最新解决方案,从而在控制理论,机器学习和数值优化域中提供无与伦比的性能。

izhikevich的神经元小网络中的参数和耦合估计
如今,实验技术使科学家可以访问大量数据。为了从生成这些数据的复杂系统中获取可靠的信息,需要适当的分析工具。卡尔曼滤波器是一种经常使用的技术,可以推断出系统的模型,即从不确定观察结果中的模型参数。最近证明,卡尔曼过滤器的无味卡尔曼过滤器(UKF)的实现,能够推断一组耦合混乱振荡器的连通性。在这项工作中,我们测试UKF是否还可以重建一小组耦合神经元的连通性,而它们的链接是电气突触或化学突触。特别是我们认为Izhikevich神经元,并旨在推断哪些神经元相互影响,将模拟的尖峰列车视为UKF使用的实验观察结果。首先,我们验证UKF是否可以恢复单个神经元的参数,即使参数随时间变化。第二,我们分析了小型神经集合,并证明UKF允许推断神经元之间的连通性,即使是为了异构,有指导性和时间发展的网络。我们的结果表明,在这个非线性耦合系统中,可以进行时间有关的参数和耦合估计。

OktoKopter 状态估计算法研究 - NADIA
在各种军事和非军事应用中具有重要意义。机载传感器精度和状态估计算法是与性能方面相关的重要问题。我们的研究重点是 OktoKopter,它是成功的通用航空平台之一。多旋翼飞机配备了全球定位系统 (GPS)、指南针、高度控制和遥测等,因此这些功能使其功能强大且用途广泛。在本文中,我们首先提出一个传感器融合模型,然后对三种状态估计算法进行比较,即卡尔曼、扩展卡尔曼滤波器 (EKF) 和无迹卡尔曼滤波器 (UKF)。发现 UKF 的性能最好;结果与算法的理论概念和实际实验数据相吻合。

深空巡航立方体卫星的自主轨道确定
立方体卫星已成为深空探索的重要选择,但必须提高其自主性,以最大限度地提高科学回报,同时限制操作的复杂性。我们在此介绍了一种在深空巡航的立方体卫星背景下的自主轨道确定解决方案。研究案例是从地球到火星的旅程。考虑使用立方体卫星标准的光学传感器。添加图像处理以 0.2 ” 的精度提取遥远天体的方向:它由多重互相关 (MCC) 算法组成,该算法使用图像背景中的明亮恒星。然后,构建无迹卡尔曼滤波器 (UKF) 以从天体的连续方向执行异步三角测量。在无法进行线性近似的情况下,UKF 满足预期性能。在地球-火星巡航中期,轨道重建达到 30 公里的 3 σ 精度。此外,使用典型的 CubeSat 硬件,滤波器的中央处理器 (CPU) 成本估计为每次迭代不到 1 秒。它已准备好在与数据融合、更快收敛和姿态控制节省相关的新可观测量方面进一步改进。
研究文章 组合姿态确定方法...
本文提出一种新的多传感器组合姿态确定方法,可高精度测量高转速刚体飞行器的姿态。分析飞行器在飞行过程中所受的外力矩,在刚体绕质心旋转的运动方程基础上,通过理论推导,提出了一种基于多传感器组合姿态确定方法。该方法融合GPS、陀螺仪和磁力计测得的数据,采用改进的无迹卡尔曼滤波(UKF)算法进行滤波。首先,根据高转速飞行器的运动特点,对刚体绕质心运动方程作出适当的假设和简化近似。利用这些假设和近似,推导出欧拉姿态角与飞行路径角、弹道偏转角之间的约束方程,作为状态方程。其次,利用地磁场模型和三轴磁强计测量的地磁强度计算出含有误差的滚转角,并与陀螺仪获取的角速度信息进行融合,建立测量方程;最后在UKF预测阶段采用龙格-库塔法对状态方程进行离散化,提高预测精度。仿真结果表明,所提方法能有效确定高速飞行器的姿态信息,并能保证飞行器姿态的准确性。

基于动态信息分配的联邦过滤器...
多传感器组合导航在水下传感器网络中得到了广泛的应用,它提高了单传感器的跟踪精度,且具有较好的容错能力。多传感器数据融合有两种基本结构:集中式融合和分布式融合。集中式融合将所有数据收集到融合中心进行处理,因此不存在任何数据丢失,集中式融合是最优的,但集中式融合计算和通信负担过重,容错能力差。分布式融合近年来受到越来越多的关注。20世纪90年代,NA Carlson提出了联邦滤波器[1]。联邦滤波器由一个全局滤波器和若干个局部滤波器组成,各局部滤波器彼此独立,采用各自的滤波算法,处理各自的测量信息并生成局部的跟踪路径。全局滤波器只能融合局部滤波器生成的路径[2]。传统的联邦滤波器使用KF作为局部滤波器,这导致传统的联邦滤波器只能跟踪线性运动目标。但测量函数往往是非线性的,KF不能利用非线性信息,因此该算法采用UKF作为局部滤波器。此外,为了识别故障传感器,将动态信息分配设计为子滤波器协方差矩阵的迹与全局协方差矩阵的迹的比值。仿真结果表明,该算法能很好地跟踪非线性系统,且精度优于UKF算法,并且能放大子系统的软故障灵敏度,从而易于识别故障传感器。

GPS-IMU传感器融合用于可靠的自动驾驶位置估计
摘要 - 全球覆盖范围和全球覆盖范围的准确定位,使其成为具有无障碍天空视图的开放区域的可靠选择。但是,在室内空间和城市峡谷中可能发生信号降解。相比之下,惯性测量单元(IMU)由陀螺仪和加速度计组成,这些计量机提供了相对运动信息,例如加速度和旋转变化。与GPS不同,IMU不依赖外部信号,使其在受GPS有限的环境中有用。尽管如此,由于误差的积累,IMU在整合加速度以确定速度和位置的同时会流动。因此,融合GPS和IMU对于增强自动驾驶汽车中导航系统的可靠性和精度至关重要,尤其是在GPS信号受到损害的环境中。为了确保平稳导航并克服每个传感器的局限性,提出的方法将融合GPS和IMU数据。此传感器融合使用无知的卡尔曼过滤器(UKF)贝叶斯过滤技术。拟议的导航系统旨在坚固,为自动驾驶汽车的安全操作(尤其是在GPS被拒绝的环境中的安全操作)至关重要的连续和准确的定位。该项目使用Kitti GNSS和IMU数据集进行实验验证,表明GNSS-IMU融合技术可减少仅GNSS的RMSE。RMSE分别从13.214、13.284和13.363降至4.271、5.275和0.224,分别为X轴,Y轴和Z轴。使用UKF的实验结果显示了使用GPS和IMU传感器融合改善自动驾驶汽车导航的有希望的方向,并使用GPS有限环境中的两个传感器中的最佳融合。索引术语 - 自主车位,全球定位系统,惯性测量单元,传感器融合,无知的卡尔曼滤波器

动态环境中的操纵器技能再现的自适应框架
摘要 - 在不确定和动态环境中的机器人技能学习和执行是一项具有挑战性的任务。本文提出了一个自适应框架,该框架结合了从演示中学习(LFD),环境状态预测和高级决策。主动的适应性阻止了反应性适应的需求,这落在环境中的变化之后而不是预期它们背后。我们提出了一种新颖的LFD表示,即弹性拉普拉斯轨迹编辑(ELTE),它不断地适应轨迹形状,以预测未来状态的预测。然后,使用无用的卡尔曼过滤器(UKF)和Hidden Markov模型(HMM)的高级反应性系统可防止基于离散决策集的动态环境的当前状态中的不安全执行。我们首先在模拟中验证我们的LFD表示,然后在36个真实世界中使用腿部移动操纵器在实验中评估整个框架。我们在环境中不同的动态变化下显示了拟议框架的效率。我们的结果表明,所提出的框架会产生强大而稳定的自适应行为。
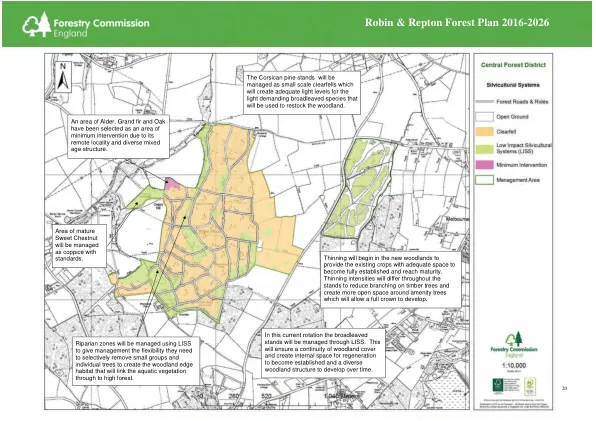
Robin&Repton Forest Plan 2016-2026
一个生态系统包括给定区域中的所有生物(植物,动物和生物),彼此相互作用,以及它们的非生存环境(天气,地球,太阳,土壤,气候)。英格兰林业战略(现为英格兰的树木和森林)描述了政府将如何在英格兰实施其林业政策,并在未来五到十年中列出了政府的优先事项。林业和水准则第5版2011年森林和水是支持英国林业标准(UKFS)的七个指南之一。UKF和准则概述了英国林业的背景,阐述了英国政府对可持续森林管理的方法,定义标准和要求,并为包括国家和国际报告在内的法规和监测提供了基础。林业委员会指南概述了土地所有者,土地经理及其顾问的森林和林地中良好管理实践的原则和标准。森林计划(FP)一项批准的计划,概述了10年内砍伐行动,并在未来50年内概述了提案。FDP每5年进行一次审查,并重新批准每10年批准。森林管理委员会(FSC)由非政府组织组成的国际认可的机构,该机构促进森林行业和消费者的可持续森林管理。历史环境这些是450,000年前人类发展的每个时期的物理遗体,包括土方工程,埋葬的遗体,建筑物和建筑物。

地磁传感器地面校准技术研究
地磁场是地球的基本物理场,具有全天时、全天候、全区域等特点。因此地磁场具有丰富的参数信息。其中,地磁总场、地磁三分量、磁倾角、磁偏角、地磁梯度可用于磁导航[1]。地磁传感器具有体积小、成本低、精度高等优点。此外,地磁传感器还具有很强的抗冲击或过载能力。因此地磁传感器在商业和军事领域得到了广泛的应用。本文的目的是对地磁传感器进行校准和补偿,并最终通过校准后的地磁信息实现地磁导航[2]。现有的地面校准算法包括:1)椭球拟合法,该方法基于一个假设。即在磁传感器测量误差的影响下,磁场测量轨迹可以近似为一条椭圆轨迹。最小二乘椭球拟合法算法的本质是寻找一组椭圆参数,使得测量数据与拟合数据之间的距离在某种意义上最小化。该方法的优点是计算方便,但是对于三轴磁传感器的补偿效果有限[3]。2)磁变校准法,该方法试图计算旋转、拉伸和平移因子,将椭球轨迹校正为圆轨迹。然后利用该模型滤除异常信号。该方法同样易于实现,但补偿标定的精度也有限[4]。3)卡尔曼滤波法。卡尔曼滤波是一种常见的线性系统参数估计方法。可以采用扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)进行补偿。