XiaoMi-AI文件搜索系统
World File Search SystemUnmanned

无人旋翼机系统.pdf
© Springer-Verlag London Limited 2011 除了《1988 年版权、外观设计和专利法》允许的为了研究或个人学习、批评或评论目的的任何合理使用之外,本出版物只能在事先获得出版商书面许可的情况下,或根据版权许可机构颁发的许可条款进行复制、存储或传播,以任何形式或任何方式复制、存储或传播。有关超出这些条款的复制的问询应发送给出版商。本出版物中使用的注册名称、商标等并不意味着这些名称不受相关法律法规的约束,因此可以自由使用,即使没有具体声明也是如此。出版商对本书中包含的信息的准确性不作任何明示或暗示的陈述,并且对可能出现的任何错误或遗漏不承担任何法律责任。

Counter-UAS-directory.-July-2020.pdf - 无人空域
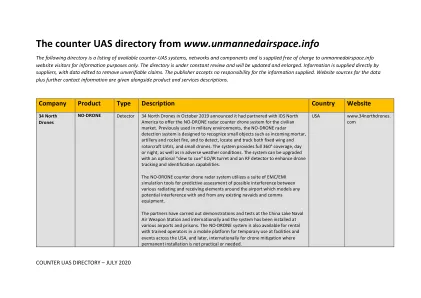
NO-DRONE 探测器 34 North Drones 于 2019 年 10 月宣布与 IDS North America 合作,为民用市场提供 NO-DRONE 雷达反无人机系统。NO-DRONE 雷达探测系统以前用于军事环境,旨在识别来袭迫击炮、火炮和火箭弹等小物体,并探测、定位和跟踪固定翼和旋翼无人机以及小型无人机。该系统提供 360° 全方位覆盖,无论白天还是夜晚,以及在恶劣天气条件下。该系统可以升级为可选的“旋转提示” EO/IR 转塔和 RF 探测器,以增强无人机跟踪和识别能力。NO-DRONE 反无人机雷达系统利用一套 EMC/EMI 模拟工具来预测评估机场周围各种辐射和接收元件之间可能产生的干扰,该工具模拟了对任何现有导航设备和通信设备的任何潜在干扰。合作伙伴已在中国湖海军航空武器站和国际上进行了演示和测试,该系统已安装在各个机场和监狱。NO-DRONE 系统还可以通过移动平台租用,由经过培训的操作员在美国各地的设施和活动中临时使用,之后在国际上用于无人机缓解,因为永久安装不切实际或不需要。
无人机系统
除了客运,UAS 还有各种其他应用。一个主要应用是在物流领域,特别是使用 UAS 作为包裹和各种货物的“送货无人机”,或用于及时供应替换零件。该领域的其他可能应用包括大型仓库的库存管理。许多公司已经在使用基于 UAS 的服务进行检查、诊断和维护任务,例如风力发电厂和太阳能发电厂、桥梁、建筑物和管道或铁路线。UAS 也非常适合在农业和林业中应用。举一个例子,通过高光谱分析基于 UAS 的植物健康状况确定将有助于更有针对性地使用化肥和农药,从而确保更好地保护环境和地下水。未来,应急服务也将受益于 UAS 的使用。通过执行初步空中侦察、进行辐射测量和分析有害物质,而无需危及生命,UAS 可以在发生危机或灾难时为获取态势感知提供相当大的附加价值。它们还可用于搜索人员或监控复杂的应急服务操作。最后但同样重要的是,UAS 可以通过将救援物资运送到洪水或其他灾害后无法进入的地区,在人道主义援助中发挥重要作用。
无人驾驶和空中 - AIAA
Aerospace America (ISSN 0740-722X) 由美国航空航天学会每月出版,地址为 1801 Alexander Bell Drive, Reston, Va. 20191-4344 [703/264-7577]。订阅费率为 AIAA 会员会费的 50%(不可从中扣除)。非会员订阅价格:美国和加拿大 163 美元,外国 200 美元。单份 20 美元。邮政局长:将地址变更和订阅订单发送至上述地址,收件人为 AIAA 客户服务部,703/264-7500。定期邮资在弗吉尼亚州赫恩登和其他邮寄处支付。版权所有 © 2010 美国航空航天学会,保留所有权利。Aerospace America 名称由 AIAA 在美国专利商标局注册。本期印刷了 40,000 份。这是第 48 卷,第 3 期。

评估无人驾驶飞机的性能...
无人机 (UAS) 的潜在用途已引起建筑行业的关注。然而,其使用仍需要调查,以便更好地了解如何将该技术应用于施工管理任务。本文旨在评估 UAS 在现场安全检查中的应用,重点关注其效用、设备性能以及与使用该技术相关的风险。为此,在巴西进行了两个案例研究。从现场飞行测试中收集数据以收集视觉资产,并定期与项目人员举行会议以征求反馈。安全检查分析基于收集的视觉资产中安全要求的可视化。进行了文件分析和对项目人员和工人的访谈,以支持绩效评估。结果,无人机的应用可以提供 87.2%(项目 A)和 58%(项目 B)所选安全检查项目的可视化,为工地的安全监控提供详细信息。气象因素和飞行员培训等障碍影响安全检查技术的使用。目前正在开展进一步研究,以系统地评估无人机支持下的安全检查的影响。

Counter-UAS-directory.-July-2020.pdf - 无人空域
NO-DRONE 探测器 34 North Drones 于 2019 年 10 月宣布与 IDS North America 合作,为民用市场提供 NO-DRONE 雷达反无人机系统。NO-DRONE 雷达探测系统曾用于军事环境,旨在识别来袭的迫击炮、火炮和火箭弹等小物体,以及探测、定位和跟踪固定翼和旋翼无人机以及小型无人机。该系统提供 360° 全方位覆盖,无论白天还是夜晚,以及在恶劣天气条件下。该系统可以通过可选的“旋转提示”EO/IR 转塔和 RF 探测器进行升级,以增强无人机跟踪和识别能力。NO-DRONE 反无人机雷达系统利用一套 EMC/EMI 模拟工具来预测评估机场周围各种辐射和接收元件之间可能产生的干扰,从而模拟对任何现有导航设备合作伙伴已在中国湖海军航空武器站和国际上进行了演示和测试,该系统已安装在各个机场和监狱。NO-DRONE 系统还可以租用,由经过培训的操作员在移动平台上临时用于美国各地的设施和活动,随后在国际上用于无人机缓解,因为永久安装不切实际或不需要。

关于无人机潜在用途的最新消息...
ACCOBAMS 秘书处负责协调 ACCOBAMS 调查计划 (ASI),以实现 ACCOBAMS 战略目标,即提高对地中海和黑海宏观区域鲸类保护状况的了解。开展海洋大型动物监测在实施方面仍然是一项昂贵且困难的工作,尤其是在大规模监测方面,因此探索使用新技术和新仪器来促进在非常不同的规模上监测鲸类变得至关重要,例如在海洋保护区 (MPA) 的层面。近几十年来,自主平台,如空中无人机 (UAV)、地面无人机 (ALV 自主实验室车辆) 和水下无人机 (滑翔机) 已经经历了重大发展,用于各种目的,特别是用于环境监测。它们代表了在不久的将来研究鲸类和海洋大型动物的一种有前途的方法,因为它们可能需要更少的现场人力,并且从长远来看是经济的。但是,仍然存在一些限制,特别是在当前的技术能力、数据处理以及与其使用相关的行政和法律方面。在 ASI 框架内,ACCOBAMS 秘书处支持了一项活动,以探索使用空中无人机实施鲸类监测的可能性。这项“在 ACCOBAMS 协议覆盖区域使用无人机监测鲸类的可行性和实验研究”由海法大学的 Morris Kahn 海洋研究站与默多克大学合作于 2019 年和 2020 年进行。这项活动编写了三份报告: