XiaoMi-AI文件搜索系统
World File Search SystemUnmanned

无人辐射检测 - eScholarship
本研究旨在利用辐射探测器、无人系统和情境传感器的最新进展,证明远程感应核和放射性威胁材料的可行性。其广泛目的是将探测器从人类手中转移到半自主系统上,以用于广泛的用途。搜索特殊核材料是一个特定的任务领域,小型无人机系统上使用的辐射探测器可以通过利用远程访问带来的优势提供巨大的操作价值:缩短收集时间、缩短源到探测器的距离并减少无意屏蔽。本研究的目标有五个:(1) 评估当前的定向搜索能力并证实无人方法将带来的改进,(2) 扩大对背景辐射环境的了解,包括建筑物屋顶,(3) 根据对当前传感器和平台能力的分析,确定系统要求并绘制权衡参数空间(即权衡空间),(4) 研究和优化搜索方法,以及 (5) 确定和描述其他任务领域以供进一步调查。为了实现这五个目标,我们首先确定了三种不同搜索模式的信号收集时间、源到探测器距离(即间隔)和中间材料衰减的边界条件:车载间隔检测
小型无人机系统
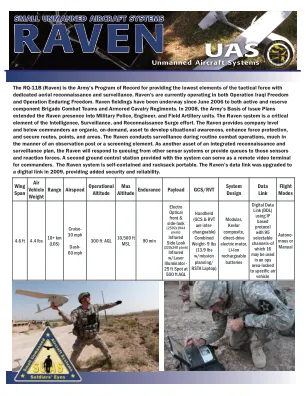
RQ-11B(渡鸦)是美国陆军的一项计划,旨在为战术部队的最低级别部队提供专用的空中侦察和监视。渡鸦目前在伊拉克自由行动和持久自由行动中服役。渡鸦自 2006 年 6 月起开始在现役和预备役旅战斗队和装甲骑兵团服役。2008 年,美国陆军的《基本发行计划》将渡鸦的部署扩展到了宪兵、工兵和野战炮兵部队。渡鸦系统是情报、监视和侦察增援行动的重要组成部分。渡鸦为连级及以下指挥官提供了一种有机的、按需的资产,以发展态势感知、加强部队保护以及保护路线、点和区域。渡鸦在常规作战行动中进行监视,其方式与观察哨或筛选部队非常相似。作为综合侦察和监视计划的另一项资产,Raven 将响应来自其他传感器系统的排队或为这些传感器和反作用力提供排队。系统提供的第二个地面控制站可作为指挥官的远程视频终端。Raven 系统是独立的,可放在背包中携带。Raven 的数据链路于 2009 年升级为数字链路,提高了安全性和可靠性。
CREX-B - 莱昂纳多 - 无人系统
› 任务控制器 (MCO) 是一个可选的有效载荷操作员站,由配备专有软件的坚固 PC 组成,可连接到 SCCV 以显示相同的遥测和视频。在此站上工作的有效载荷操作员能够执行有效载荷视频处理,而 GCCS 操作员(飞行员)则专注于驾驶 UAS。MCO 还可用于任务规划、地图准备和通用 C4I。

无人机系统简介
本书共 12 章,由 13 位航空、航空学、控制和信息系统以及工程领域的顶级专家撰写。本书的编辑是堪萨斯州立大学和新墨西哥州立大学航空和无人机系统研究的教授。在高度动态和不断发展的 UAS 行业中,本书旨在确定和调查 UAS 操作的基本原理,因此,它可以作为 UAS 大学入门课程的教科书。本书从非工程民用操作角度编写,从 UAS 的历史开始,继续介绍当前的技术以及未来的发展。它涵盖了 UAS 元素和操作的所有方面,以及安全程序和人为因素,让读者对安全操作 UAS 所需的条件有一个实际的了解。第 1 章“历史”详细介绍了 UAS 的历史,特别是从军事应用的角度。第 2 章“无人机系统要素”介绍了 UAS 要素:指挥和控制、通信、有效载荷、发射、人员要素。目的是快速向读者介绍 UAS 使用的操作问题。第 3 章“美国航空监管体系”重点关注一个热点问题,这对于行业有序发展至关重要。它详细描述了美国和其他国家现有的航空监管体系
无人机系统 - CAAM
本民航指令由以下部分组成,定义如下: 标准:通常以“应当”或“必须”等词开头,是指对物理特性、配置、性能、人员或程序的任何规范。对于空中航行的安全和规律性,需要统一应用,且运营商必须遵守。如无法遵守,必须通知中国民航局。 建议措施:通常以“应该”或“可以”等词开头,是指对物理特性、配置、性能、人员或程序的任何规范。对于空中航行的安全和规律性,需要统一应用,且运营商将尽力遵守。 附录:为方便起见,单独分组的材料,但构成中国民航局规定的标准和建议措施的一部分。 定义:标准和建议措施中使用的术语,它们没有公认的词典含义,因此并非不言自明。定义不具有独立地位,但对于使用该术语的每个标准和建议规范而言,定义都是不可或缺的组成部分,因为术语含义的改变会影响规范。表格和图表:这些图表补充或说明了标准或建议规范,并在其中引用,构成相关标准或建议的一部分
美国无人机系统
在科索沃(1999 年)、伊拉克(自 2003 年起)和阿富汗(自 2001 年起)等冲突中,UAS 的军事用途说明了无人机的优点和缺点。UAS 经常登上全国头条新闻,因为它们执行了历史上由有人驾驶飞机执行的任务。UAS 被认为比有人驾驶飞机具有两个主要优势:它们消除了对飞行员生命的风险,并且它们的航空能力(例如续航能力)不受人类限制。UAS 还可以通过执行那些不需要飞行员在驾驶舱中的枯燥、肮脏或危险的任务来保护飞行员的生命。UAS 的采购和运营成本也可能比有人驾驶飞机低。然而,UAS 较低的采购成本可以与其更大的坠机倾向相权衡,而对机上机组人员的最低风险可以与在与有人驾驶资产共享的空域中飞行无人机所固有的复杂性和危险相权衡。
FLIR-Tau2-Brochure.pdf - 无人系统技术
FCC 通知。本设备是设计用于集成到其他产品中以提供热成像功能的子组件。它不是适合消费者使用的最终产品。当集成到主机设备中时,最终产品将生成、使用和辐射可能导致无线电干扰的射频能量。因此,集成此子组件的最终产品必须根据联邦通信委员会 (FCC) 的规定进行测试和批准,然后才能在美国出售或出租、做广告、进口、销售或租赁。FCC 法规旨在提供合理的保护以防止对无线电通信的干扰。参见 47 C.F.R.§§ 2.803 和 15.1 及后续条款。
无人驾驶飞行器手册
c � Springer Science+Business Media Dordrecht 201 本作品受版权保护。所有权利均由出版商保留,无论涉及全部或部分材料,特别是翻译、重印、重复使用插图、朗诵、广播、在缩微胶片或任何其他物理方式上复制、传输或信息存储和检索、电子改编、计算机软件或通过现在已知或今后开发的类似或不同的方法的权利。与评论或学术分析相关的简短摘录或专门为在计算机系统上输入和执行而提供的材料不受此法律保留的约束,仅供作品购买者使用。仅根据出版商所在地的版权法规定(其最新版本)复制本出版物或其部分内容,并且必须始终获得 Springer 的使用许可。可通过版权许可中心的 RightsLink 获得使用许可。违反者将根据相应的版权法受到起诉。本出版物中使用一般描述性名称、注册名称、商标、服务标记等并不意味着,即使没有具体声明,这些名称也不受相关保护法律法规的约束,因此可以免费用于一般用途。虽然本书中的建议和信息在出版之日被认为是真实准确的,但作者、编辑或出版商均不对可能出现的任何错误或遗漏承担任何法律责任。出版商对本文所含材料不作任何明示或暗示的保证。

无人驾驶飞行器和模拟
概述了无人驾驶飞行器 (UA V) 及其各种作用。既有致命的也有非致命的。进行了讨论。描述了用于侦察的 UA V 系统的要素。监视和目标设计已描述,以突出模拟在采集中的作用。设计。开发。测试。评估和此类系统的操作。提到了 UA V 模拟研究的各种应用。尝试通过以下三个典型问题来强调模拟如何帮助识别设计缺陷,从而改进设计,这些问题在航空发展机构设计和开发 UA V 时遇到:(i) 'Lakshya 的发射动力学。(ii) 牵引系统动力学、Lakshya 牵引体,以及 (iii) 硬件在线模拟 - 航路点导航 - Nishant。