XiaoMi-AI文件搜索系统
World File Search SystemVL

Sangho Suh 和 Pengcheng An。2022 年。利用生成式对话式人工智能为学生开发创造性学习环境
[1] Juris Hartmanis。1994 年。图灵奖演讲:论计算复杂性和计算机科学的本质。ACM 通讯 37,10(1994 年),37-44。[2] Samuel Ichiyé Hayakawa 和 Alan R Hayakawa。1990 年。思想和行动中的语言。霍顿·米夫林·哈考特。[3] Ronald S Lenox。1985 年。为偶然发现而教育。化学教育杂志 62,4(1985 年),282。[4] Lori McCay-Peet 和 Elaine G Toms。2010 年。知识工作中的偶然发现过程。在第三届情境中信息交互研讨会论文集。377-382。[5] Sangho Suh。 2020. 通过支持抽象阶梯内的相互作用促进有意义的学习。2020 年 IEEE 视觉语言和以人为本计算(VL/HCC)研讨会。IEEE,1-2。[6] Sangho Suh、Martinet Lee、Gracie Xia 等人。2020. 编码条:一种通过漫画教授和学习编程概念的教学工具。2020 年 IEEE 视觉语言和以人为本计算(VL/HCC)研讨会。IEEE,1-10。[7] Jeannette M Wing。2006. 计算思维。ACM 通讯 49, 3 (2006),33-35。

多模式推理的问题意识视力变压器
视觉语言(VL)模型已获得了显着的重点,从而在多模式推理方面取得了显着进步。这些体系结构通常包括视觉编码器,大型语言模型(LLM)和一个将视觉特征与LLM的代表空间保持一致的投影模块。尽管他们成功了,但仍然存在一个关键的限制:愿景编码过程仍然与用户查询相关,通常是以与图像相关的问题的形式。因此,所得的视觉特征可能无法最佳地调整图像的特定元素。为了解决这个问题,我们介绍了QA-Vit,这是一种问题的多模式原因,这是一种问题,将问题意识直接嵌入到视觉编码器中。此集成导致动态视觉特征,重点是提出问题的相关图像方面。QA-VIT是模型 - 静态的,并且可以有效地将其置于任何VL体系结构中。广泛的经验证明了将我们的方法应用于各种多模式体系结构的有效性,从而导致跨不同任务的一致改进,并展示了其以增强视觉和场景文本理解的能力。

F-35B 首次海上试验演示摘要
帕塔克森特河 F-35 综合测试部队 (ITF) 的试飞员计划在实验试飞员协会 (SETP) 东海岸研讨会上就 2011 年 10 月在黄蜂号 (LHD-1) 上进行的 F-35B 初始舰船试验的计划和执行情况进行演讲。在试验期间,两架 F-35B (BF-2 和 BF-4) 完成了 72 次短距起飞 (STO) 和垂直着陆 (VL),同时评估了 F-35B 在 LHD 上的可维护性。最终,所有舰载包络扩展目标均已实现,包括在测试的环境条件和着陆点内清除与 AV-8B 一样强大的 STO 和 VL 风包络。船舶试验是帕塔克森特河 ITF、USS Wasp 和海军海上系统司令部 (NAVSEA) 共同努力的结果,需要搭载近 250 名人员和 140,000 磅专业支持设备。完成试验需要一年多的详细规划。试验的独特元素如下所列,将在演示期间进行讨论:
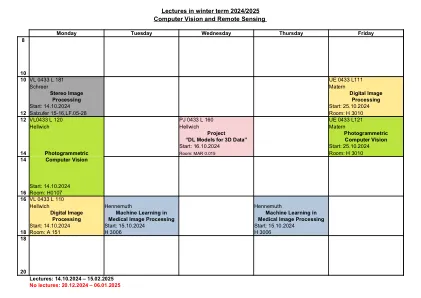
冬季学期的讲座2024/2025计算机视觉和遥感
10 10 VL 0433 L 181 UE 0433 L111 Schreer Matern Stereo Image Digital Image Processing Start: 14.10.2024 Start: 25.10.2024 SALFER 15-16, LF.05-28 Room: H 3010 12 VL0433 L 160 UE 0433 L121 Hellwich Hellwich Matern Project Photogrammetric “DL Models for 3D Data” Computer Vision Start: 16.10.2024开始:25.10.2024 14摄影测量房:3月0.015室:H 3010 14计算机视觉10 10 VL 0433 L 181 UE 0433 L111 Schreer Matern Stereo Image Digital Image Processing Start: 14.10.2024 Start: 25.10.2024 SALFER 15-16, LF.05-28 Room: H 3010 12 VL0433 L 160 UE 0433 L121 Hellwich Hellwich Matern Project Photogrammetric “DL Models for 3D Data” Computer Vision Start: 16.10.2024开始:25.10.2024 14摄影测量房:3月0.015室:H 3010 14计算机视觉
Valtek 弹簧气缸线性执行器 - SIALCO
对于需要超高循环 (UHC) 寿命的应用,福斯提供 VL-UHC 系列执行器,该执行器具有超长的循环寿命。通过添加和修改标准 VL 系列执行器中使用的几个部件,VL-UHC 获得了以前认为无法实现的循环寿命。VL-UHC 执行器特别适合需要大量全行程循环的应用。

儿童艾滋病毒感染作为治疗艾滋病毒的模型
ART=抗逆转录病毒疗法;HAART=高效抗逆转录疗法;HLA=人类白细胞抗原;VL=病毒载量 1. Salgado M 等人。逆转录病毒学 2011;8:97;2. Lodi S 等人。Arch Intern Med 2012;172:1252-5;3. Goujard C 等人。抗逆转录治疗学 2012;17:1001-9;4. Saez-Cirion A 等人

使用模拟验证 AFDX 基础设施... - HAL
摘要。直到最近,飞机内部对联网的需求并不强烈。事实上,通信主要是通过电缆和以太网协议处理的。航空电子嵌入式系统的发展和民用飞机中集成功能的数量改变了这种情况。事实上,这些功能意味着交换数据量大幅增加,从而导致功能之间连接数量的大幅增加。在处理这种新复杂性的可用机制中,我们发现了航空电子全双工交换以太网 (AFDX),这是一种允许模拟源和一个或多个目的地之间的点对点网络的协议。AFDX 的核心思想是虚拟链路 (VL),用于模拟设备之间的点对点通信。主要挑战之一是表明 VL 上数据包的总传送时间受某个预定义值的限制。这是一个困难的问题,还需要提供 AFDX 网络的正式但相当具有发展性的模型。在本文中,我们建议使用基于组件的设计方法来描述模型的行为。然后,我们提出了一种随机抽象,它不仅可以简化验证过程的复杂性,还可以提供有关协议的定量信息。

佛罗里达州医疗补助首选药物清单于 2025 年 1 月 1 日生效
HIC3 HIC3 Desc 标签名称 通用名称 医疗补助最低年龄 医疗补助最高年龄 PA 要求 A1A 洋地黄苷 地高辛 0.05 毫克/毫升溶液 地高辛 0 999 否 地高辛 0.125 毫克片剂 地高辛 0 999 否 地高辛 0.25 毫克片剂 地高辛 0 999 否 地高辛 125 微克片剂 地高辛 0 999 否 地高辛 250 微克片剂 地高辛 0 999 否 A1B 黄嘌呤 咖啡因 CIT 60 毫克/3 毫升口服 咖啡因柠檬酸盐 0 999 否 咖啡因 CIT 60 毫克/3 毫升小瓶 咖啡因柠檬酸盐 0 999 否 THEO-24 ER 100 MG 无水茶碱胶囊 0 999 否 THEO-24 ER 200 MG 无水茶碱胶囊 0 999 否 THEO-24 ER 300 MG 无水茶碱胶囊 0 999 否 THEO-24 ER 400 MG 无水茶碱胶囊 0 999 否 茶碱 80 MG/15 ML 无水茶碱杯 0 999 否 茶碱 80 MG/15 ML 无水茶碱溶液 0 999 否 茶碱 ER 100 MG 无水茶碱片剂 0 999 否 茶碱 ER 200 MG 无水茶碱片剂 0 999 否 茶碱 ER 300 MG 无水茶碱片剂 0 999 否 茶碱 ER 400 MG 无水茶碱片剂 0 999 否 茶碱 ER 450 MG 无水茶碱片剂 0 999 否 茶碱 ER 600 MG 无水茶碱片剂 0 999 否 A1C 正性肌力药物 多巴胺 1,000 MG/250 ML D5W 葡萄糖中 5% 的盐酸多巴胺 0 999 否 多巴胺 250 MG/20 ML 小瓶盐酸多巴胺 0 999 否多巴酚丁胺 250 MG/250 ML-D5W 葡萄糖中盐酸多巴酚丁胺 5 % 0 999 否 多巴酚丁胺 500 MG/250 ML D5W 葡萄糖中盐酸多巴酚丁胺 5 % 0 999 否 乳酸米力农 10 MG/10 ML VL 乳酸米力农 0 999 否 乳酸米力农 20 MG/20 ML VL 乳酸米力农 0 999 否 乳酸米力农 50 MG/50 ML VL 乳酸米力农 0 999 否 米力农-D5W 20 MG/100 ML 乳酸米力农/D5W 0 999 否
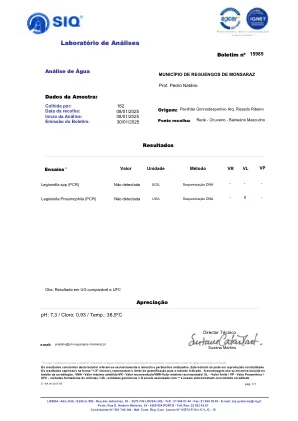
0 1 内部通报_分析_全部
本公告中的结果仅指所分析的样本和参数。本公告仅可全文复制。以“< X”(较小)形式表示的结果代表所示方法的定量限。抽样不属于认可范围。 VMA - 最大允许值 /VR - 推荐值 /VMR-最大推荐值 /VL - 极限值 /VP - 参数值 /UFC - 菌落形成单位 /UG - 基因组单位//标有**的测试是采用认可方法的分包测试。