XiaoMi-AI文件搜索系统
World File Search SystemVLAS

一项针对体现AI
摘要 - 深度学习在许多领域都表现出了非凡的成功,包括计算机视觉,自然语言处理和强化学习。这些领域中的代表性人工神经网络涵盖了卷积神经网络,变压器和深Q网络。基于单峰神经网络,已经引入了许多多模型模型,以解决一系列任务,例如视觉问题答案,图像字幕和语音识别。体现AI中指令跟随机器人策略的兴起刺激了一种新型的多模式模型的开发,称为视觉语言动作模型(VLAS)。他们的多模式能力已成为机器人学习的基础元素。已经提出了各种方法来增强特征,例如多功能性,灵巧性和概括性。一些模型专注于精炼特定组件。其他人旨在制定旨在预测低级行动的控制政策。某些VLA充当高级任务计划者,能够将长途任务分解为可执行子任务。在过去的几年中,出现了无数的vlas,这反映了体现AI的迅速发展。因此,必须通过全面的调查来捕获不断发展的景观。
重新设计 KLM Catering 的食品组装流程...
布局设计 在文献综述中,我们指定了四种用于生产流程的布局类型。每种布局类型都有自己的数量/品种特征。我们确定 VLAS 流程的产品品种少,数量大。与这些特征相匹配的布局类型是单元布局和产品布局。因此,使用这两种布局类型,我们为 VLAS 创建了通用布局设计,同时尝试结合头脑风暴法解决出现的瓶颈问题。我们设计了 8 种不同的布局方案,布局类型和生产流程各不相同。除此之外,供应方式也各不相同,有专门为每个航班供应餐食,也有批量供应一个航班的餐食。在与所有利益相关者开会后,我们在影响/易用性矩阵中绘制了 8 种布局方案,以根据对操作的影响和实施的难易程度对方案进行分类。排除了三种布局,因为它们被归类为影响小且实施难度高。然后,所有利益相关者使用层次分析法对剩下的五种布局进行了评判和排名。我们从人体工程学、质量、生产率、可行性、成本和生产时间标准等方面对各种方案进行了比较。在比较了五种方案后,装配线排名第一,(分体式)升降台排名第二和第三。这三种方案将被选中进行进一步研究、测试和
约克夏犬、博美犬、哈巴狗和波士顿梗犬特定品种的椎心大小和椎左心房大小参考区间
在 IDEXX 远程医疗顾问的电子病历系统中搜索了 2023 年 1 月 1 日至 2023 年 3 月 31 日期间接受胸部 X 光检查的 YT、哈巴狗、POM 和 BT。这些 X 光片之前已提交给 IDEXX 远程医疗顾问进行远程医疗审查。如果狗进行了 2 次或 3 次胸部 X 光检查(至少 1 次右侧胸部 X 光检查和 1 次腹背或背腹视图),并且未发现心肺或全身疾病的证据,则将其纳入。所有 X 光检查不完整和/或已知心外疾病的狗均被排除在外(即胸部 X 光片上的异常,如胸腔积液、淋巴结肿大、肺炎或肿瘤)。定位不佳的放射线研究限制了研究心脏病专家判断的 VHS 和 VLAS 测量的准确性,因此也被排除在外。研究中包括的所有狗都必须具有正常的心脏听诊,这由进行身体检查的原始兽医记录在远程医疗咨询表中。所有报告有心脏杂音的狗都被排除在外。如果狗没有报告心脏杂音,但最初的 IDEXX 放射科医生或心脏病专家报告主观心脏扩大,正在服用可能影响心脏大小的心脏药物(即匹莫苯丹或利尿剂),有无谷物饮食史,或有 N 端脑钠肽前体升高史,则该狗被称为“疑似心脏病”并被排除在外。从患者记录和射线照片中收集的数据包括年龄、体重、性别、VHS 和 VLAS。所有品种的 VHS 和 VLAS 测量均由同一位获得委员会认证的心脏病专家进行。由于所有 X 光片都是数字格式,因此使用数字卡尺进行测量并在右侧 X 光片上进行。VHS 测量采用 Buchanan 和 Bücheler 1 最初描述的技术,其中测量心脏长轴从隆突中心到心脏腹尖最远端轮廓。隆突被定义为气管内透射线的圆形结构,代表左、右主支气管的分叉。心脏短轴在心脏中央第三区域测量,垂直于长轴。然后将两个轴测量值定位在胸椎体上,从第四胸椎的颅缘开始。两个轴的总和用于确定最接近 0.1 个椎骨的椎骨单位数(补充图 S1)。所有测量均为

人工智能工具在
这项研究的目的是评估肯尼亚高等教育机构教学和学习的有效性,专门针对智能辅导系统(ITS),自适应学习平台,虚拟学习助理(VLAS),自动化的渐变系统和学习系统和学习分析系统(LAS),其访问性使用和学习能力及其有效性及其有效性。这项研究采用了混合方法研究设计,结合了定量和定性方法,从肯尼亚的15所选定的公立和私立大学以及技术学院中收集了教师,学生和管理人员的全面数据。调查结果表明,肯尼亚高等教育机构中AI工具的可访问性受到显着限制。绝大多数受访者表示不容易获得AI工具,强调了机构内不同部门和项目的访问差异。在使用方面,在大多数机构中,将AI工具集成到教学实践中仍处于其早期阶段,并且在这些机构可用的地方,它们并不总是与现有课程完善,从而导致不同学科的有限和不平衡采用。尽管有这些挑战,但开始使用AI工具的人报告了诸如个性化学习,更有效的评估过程和增强反馈机制之类的好处,这表明AI有可能在更有效地使用的情况下改变教育实践。关键字:有效性,人工智能,教学,高等教育机构发现进一步建立了肯尼亚高等教育机构的AI工具与有效的教学之间的显着相关性(r = .781; p = .000)。该研究指出,尽管AI可以显着改善教育经验,但其当前影响受到几个因素的限制。教师对AI的不熟悉,缺乏全面的培训以及将AI工具集成到课程中的不足是其有效使用的主要障碍。但是,如果已成功实施AI,它为更好的学习成果,更高的学生参与度和更个性化的反馈做出了贡献。该研究建议机构必须投资于基础架构,持续的专业发展和课程集成,以确保AI工具既可以访问又有效地用于增强教学和学习成果。
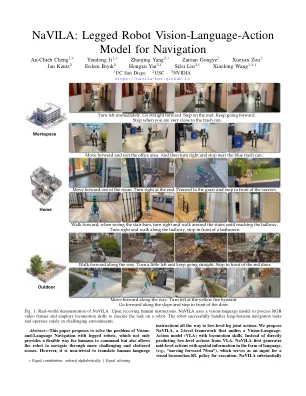
navila_paper.pdf
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许

玩具车垫 3D 全印花运动服
“美国城市、城镇、社区、州、县、大都市区、邮政编码、区号和学校的本地指南。” 76 次观看45 次观看49 次观看39 次观看41 次观看36 次观看36 次观看37 次观看33 次观看37 次观看35 次观看35 次观看36 次观看40 次观看34 次观看45 次观看36 次观看39 次观看27 次观看35 次观看25 次观看37 次观看35 次观看32 次观看26 次观看29 次观看41 次观看24 次观看43 次观看25 次观看35 次观看30 次观看39 次观看27 次观看27 次观看30 次观看27 次观看22 次观看31 次观看30 次观看24 次观看26 次观看26 次观看31 次观看31 次观看29 次观看22 次观看40 次观看26 次观看24 次观看30 次观看40 次观看25 次观看26 次观看25 次观看19 次观看93 次观看80 次观看69 次观看84 次观看61 次观看63 次观看70 次观看83 次观看91 次观看105 次观看52 次观看57 次观看89 次观看67 次观看74 次观看88 次观看71 次观看55 次观看82 次观看52 次观看80 次观看73 次观看49 次观看69 次观看51浏览次数56 浏览次数56 浏览次数55 浏览次数60 浏览次数41 浏览次数65 浏览次数50 浏览次数65 浏览次数50 浏览次数41 浏览次数43 浏览次数52 浏览次数45 浏览次数55 浏览次数49 浏览次数43 浏览次数52 浏览次数62 浏览次数49 浏览次数44 浏览次数 从 0 天 0 小时 00 分钟 00 秒 分享此优惠 送货需要至少 7 个工作日才能发货 购买的物品可以从我们的办公室领取或送货 物品必须在 2021 年 6 月 27 日之前领取/收到 未在 2021 年 6 月 27 日之前领取/收到的物品将被没收,不予退款 您的产品可立即领取 - 详情请参阅下文 无现金价值/无现金返还/不退款 立即检查产品;自收到产品之日起 7 天内有缺陷退货,前提是退回的物品未使用且