XiaoMi-AI文件搜索系统
World File Search SystemVNIR
xlvii OSI Optoin-2024 2024年10月23日至25日
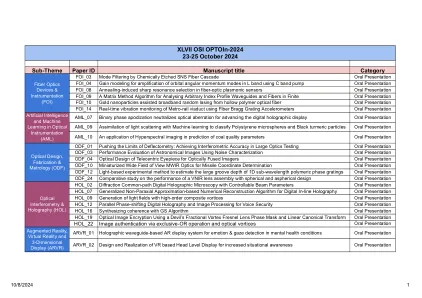
ODF_01 Pushing the Limits of Deflectometry: Achieving Interferometric Accuracy in Large Optics Testing Oral Presentation ODF_03 Performance Evaluation of Astronomical Images Using Noise Characterization Oral Presentation ODF_04 Optical Design of Telecentric Eyepiece for Optically Fused Imagers Oral Presentation ODF_10 Miniaturized Wide Field of View MWIR Optics for Missile Coordinate Determination Oral Presentation ODF_12基于光的实验方法,以估计1D亚波长度聚合物相位栅格的大凹槽深度口腔呈递ODF_24 ODF_24关于VNIR镜头组装性能的比较研究,并具有球形和非球形设计口腔设计HOL_02衍射通用型态度差异差异差异差异 - 数字重建算法用于数字在线全息口腔呈现HOL_09 HOL_09具有高阶复合涡流的光场生成口服呈现HOL_12 HOL_12平行相移数数字全息图和图像处理,用于语音安全性hol_16使用GS Algority holgor_99 Vortex Fresnel镜头相掩码和线性典型转换口服口头呈递

卡内基机载天文台-2 - 克里斯托弗·安德森
卡内基机载观测站 (CAO) 的建立是为了满足宏观测量的需求,以揭示地球生态系统的结构、功能和有机组成。2011 年,我们完成并启动了 CAO-2 下一代机载分类制图系统 (AToMS),其中包括高保真可见光至短波红外 (VSWIR) 成像光谱仪 (380 – 2510 nm)、双激光波形光检测和测距 (LiDAR) 扫描仪以及高空间分辨率可见光至近红外 (VNIR) 成像光谱仪 (365 – 1052 nm)。在这里,我们描述了如何使用硬件和软件协同对准和处理技术融合来自这些传感器的多个数据流。通过这些数据流,我们定量地证明了精确的数据融合极大地提高了从遥感中获得的生态信息的维度。我们比较了两个截然不同场景的数据维度——斯坦福大学的建筑环境和亚马逊低地热带森林。主成分分析显示,斯坦福案例中有 336 个维度(自由度),亚马逊案例中有 218 个维度。亚马逊案例呈现的遥感数据维度可能是有史以来森林生态系统的最高水平。模拟数据流错位使有效信息内容减少了 48%,凸显了在进行多传感器
使用成像光谱法在茂密的热带森林中进行定量机载库存
摘要:热带森林具有极为丰富的植物多样性,但其特征描述仍不完整,部分原因是现场评估的资源密集度。遥感技术可以提供有价值、经济高效、大规模的见解。本研究调查了机载激光雷达和成像光谱的结合使用,以在法属圭亚那的景观尺度上绘制树种图。使用线性判别分析 (LDA)、正则化判别分析 (RDA) 和逻辑回归 (LR) 为 20 个物种中的每一个开发了二元分类器。用短波红外 (SWIR) 波段补充可见光和近红外 (VNIR) 光谱带可将目标物种的平均分类准确率从 56.1% 提高到 79.6%。增加非焦点物种的数量会降低目标物种识别的成功率。只要使用适当的标准来调整阈值概率分配,分类性能就不会受到非焦点类别中的杂质率(分配类别之间的混淆)的显著影响(偏差高达 5%)。每个物种类别中有限的树冠数量(30 个树冠)足以有效地检索正确的标签。在 1.5 公顷的分辨率下,目标物种的总冠层面积与 118 公顷的基部面积密切相关,这表明该方法的操作应用具有现实的前景(六种主要商业树种的 R 2 = 0.75)。

在具有选定光谱带的沿海地区有效塑料检测
海洋塑料污染构成了重大的生态,经济和社会挑战,需要创新发现,管理和缓解解决方案。光谱成像和光学遥感在水生环境中检测和表征大型塑料方面已证明有价值的工具。尽管许多研究着重于短波红外频谱中感兴趣的频段,但该范围内的传感器的高成本使得很难在长期和大规模应用中大量生产它们。因此,我们介绍了各种机器学习模型在四个数据集中的评估和传输,以识别用于检测和分类海洋环境中最普遍的塑料的关键频段,并在可见的和近边缘(VNIR)范围内检测到最普遍的塑料。我们的研究使用四个不同的数据库,从实验室条件下的维珍塑料到田间条件下的天气塑料。我们使用顺序特征选择(SFS)和随机森林(RF)模型进行最佳频带选择。同质背景对于准确检测的重要性是由97%的精度突出显示的,并且数据集之间的成功频段转移(87% - 91%)表明,在各种情况下适用的传感器的可行性。但是,模型传输需要为每个特定数据集进行进一步的培训,以实现最佳精度。结果强调了通过持续改进和扩展培训数据集的更广泛应用的潜力。我们的发现提供了有价值的信息,以开发引人注目的负担得起的检测传感器来解决沿海地区的塑料污染。这项工作为增强全球海洋垃圾检测和减少的准确性铺平了道路,从而为我们的海洋带来了可持续的未来。

城市运营传感器
3.6.1技术描述2 - 声传感器网络(3.7 on 5)3-5 3.6.2技术描述7 - 用于成像的便携式低成本雷达和3-6通信(2 on 5)3.6.3技术描述8 - 高光谱vnir/lwir:scopes/scopes/binocular/binocular,3-6 subeverance,3-6 Surveillance,sniper sectection,3。3. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6. 6 on。 Doppler Radar for 3-7 Through-the-Wall-Sensing (3.3 on 5) 3.6.5 Technology Description 11 – Long Wavelength Infrared (LWIR) (4.4 on 5) 3-8 3.6.6 Technology Description 12 – Coherent Radar Through Wall System (3.7 on 5) 3-8 3.6.7 Technology Description 14 – Sensor System for Vehicle Situation Awareness 3-9 (4.4 on 5) 3.6.8 Technology Description 15 – Tunable THz Imager (4.1 on 5)3-9 3.6.9技术描述17 - 卡拉迪姆:无人看管的地面警报传感器(2 on 5)3-10 3.6.10技术描述18 - DAOTE:DAOTE:检测隐藏的3-10狙击手(3.7 on 5)3.6.6.11技术描述19 - PILAR:PILAR:PILAR:PILAR:OACOSTIC,SNIPERTIC 3.11 3-11 3-11 ON:传感器(1.9 on 5)3-11 3.6.13技术描述21 - 眼镜蛇:反电池雷达(4.1 on 5)3-12 3.6.14技术描述22 - 叶子渗透:叶子穿透(1 on 5)3-12 3.6.15技术说明37 - 短期生物百叶窗 - 短距离生物百叶窗(5)3.6.6.6.6.6.16技术范围38 – Spy and and and op and wowl(4. 38 – Spy and towr(4)。 3-13 3.6.17技术描述42 - 主动防御传感器系统(2.1 on 5)3-14