XiaoMi-AI文件搜索系统
World File Search SystemVOR
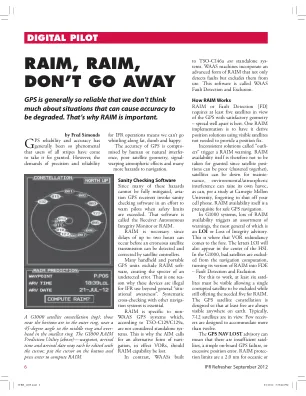
押韵,押韵,不要走开
健全性检查软件由于许多此类危害无法完全缓解,航空 GPS 接收器会调用健全性检查软件,在超出安全限制时向飞行员发出警告。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必需的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会发生长达两个小时的延迟。许多手持和便携式 GPS 设备不包含 RAIM 软件,从而造成未检测到错误的阴影。这就是为什么这些设备除了一般的“态势感知”之外,不得用于 IFR 使用的原因之一。必须与其他导航系统进行系统性交叉检查。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 呼吁在 RAIM 功能丧失时采用替代导航方式(实际上是 VOR)的原因。相比之下,WAAS 的
索取离职津贴的证明...
其他四亲等以内的亲属、二亲等以内的姻亲、养子女或养父母,我向他们提供住宿和赡养不仅是暂时的,而且完全或主要出于法律或道德义务。 (关系,例如父母或姐夫)由于专业原因或根据公共卫生官员或法医的医疗证明我需要其帮助的人。

职业晋升服务 - 德国联邦国防军
» 根据要求在贵公司现场提供个人建议 » 为来自所有专业领域的申请人量身定制安置 » 将您的空缺职位、培训和实习职位纳入我们的德国联邦国防军工作交流 » 参与工作和……德国联邦国防军教育展会 » 在联邦国防军媒体上发布职位空缺 » 有关个人资助机会的信息 » 我们为您免费提供服务

航空电子设备健康监测可信度评估
本文提供了一种使用自动测试设备 (ATE) 评估下机航空电子系统健康监测可信度的方法。指标包括假阳性、假阴性、真阳性和真阴性的概率。我们首次考虑了刺激信号源 (SSS) 的不稳定性、测量通道误差的随机和系统分量以及系统本身的可靠性特性。我们考虑了永久性故障和间歇性故障的指数分布的具体情况,并推导出计算可信度指标的公式。数值计算说明了正确和错误决策的概率如何取决于精度参数。我们表明,当刺激信号的标准差增加时,假阳性和假阴性的概率增加得比真阳性和真阴性的概率下降得快得多。对于甚高频全向测距 (VOR) 接收器,我们证明即使刺激信号源产生的随机误差为零,假阳性和假阴性的概率也不为零。

1 MILVIZ DHC2 Beaver Honeywell KAP 140 自动驾驶仪系统
Beaver 中包含的 KAP 140 自动驾驶仪系统是一种基于速率的数字自动驾驶仪系统,可提供平稳的性能和仅在更昂贵的自动驾驶仪中发现的增强功能。该系统是霍尼韦尔开发的首款此类系统,将数字技术和可靠性带入轻型飞机驾驶舱。KAP 140 滚转轴功能包括机翼调平器、航向选择和 VOR/LOC 拦截和跟踪。KAP 140 还可以耦合到 GPS 和 RNAV 接收器。滚转速率信息来自转弯协调器。俯仰轴功能包括垂直速度、下滑道和高度保持以及高度预选选项。俯仰信息来自压力传感器和加速度计。KAP 140 自动驾驶系统独立于飞机的人工地平线运行。因此,如果真空系统发生故障,自动驾驶仪将保留侧倾稳定性和所有垂直模式。Beaver 版本中的 KAP 140 功能

现有的 E 级上层交通管理 (ETM) 导航能力
无人自由气球 (UFB)、高空长航时 (HALE) 无人系统和重新引入的超音速客机预计将在 600 飞行高度 (FL600) 以上日益活跃。预计上层 E 级交通管理 (ETM) 系统将支持这些操作。与 60,000 英尺 (ft) 以下的空中交通管理 (ATM) 环境类似,ETM 车辆将采用导航。本文讨论了现有的地面、卫星和机载导航替代方案及其对 ETM 的适用性。这些系统包括甚高频 (VHF) 全向测距 (VOR)、测距设备 (DME)、战术空中导航 (TACAN) 和全球导航卫星系统 (GNSS),包括全球定位系统 (GPS,带增强和不带增强)。此外,本文还讨论了基于飞机的技术,例如惯性导航系统 (INS)。这些导航技术的评估依据包括总体优势、劣势、当前对 ETM 的支持水平以及实现或增强 ETM 支持所需的变更。
航空电子设备健康监测可信度评估...
本文提供了一种使用自动测试设备(ATE)评估下机航空电子系统健康监测可信度的方法。指标包括假阳性、假阴性、真阳性和真阴性的概率。我们首次考虑了刺激信号源(SSS)的不稳定性、测量通道误差的随机和系统分量以及系统本身的可靠性特性。我们考虑了永久性故障和间歇性故障的指数分布的具体情况,并推导出计算可信度指标的公式。数值计算说明了正确和错误决策的概率如何取决于精度参数。我们表明,当刺激信号的标准偏差增加时,假阳性和假阴性的概率增加得比真阳性和真阴性的概率下降得快得多。对于甚高频全向范围 (VOR) 接收器,我们证明即使刺激信号源产生的随机误差为零,假阳性和假阴性的概率也不同于零。

基于性能的导航
所有导航系统都可以用性能来描述。例如,地面导航辅助设备(如 VOR)可提供可测量的性能水平,该性能水平以可接受的导航公差为依据。PBN 操作同样基于导航性能,但性能概念根本不同。基于地面导航辅助设备的运行取决于辐射信号的性能以及飞机准确利用该信号的能力,而在基于性能的导航中,性能本身是指定的,并且导航系统需要满足最低性能水平。原则上,任何达到指定导航性能水平的导航方法都是可以接受的。然而,在实践中,在某些情况下需要特定的导航系统才能满足特定导航规范的要求。例如,RNP 4 要求强制携带 GNSS,因为没有其他当前导航系统可以满足导航规范的要求。至少在理论上,如果有另一种导航方式可以满足 RNP 4 的性能要求而无需 GNSS,那么 GNSS 的要求就可以从导航规范中删除。 2. 绩效评估
押韵,押韵,不要走开
健全性检查软件由于许多此类危险无法完全缓解,航空 GPS 接收器会调用健全性检查软件,以便在超出安全限制时警告飞行员。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必要的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会出现长达两个小时的延迟。许多手持式和便携式 GPS 设备不包括 RAIM 软件,从而产生了未检测到错误的幽灵。这就是为什么这些设备除了一般的“态势感知”之外,在 IFR 用途上是非法的。与其他导航系统的系统交叉检查至关重要。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 要求在失去 RAIM 功能时采用替代导航形式(实际上是 VOR)。相比之下,WAAS 构建
航空电子设备健康监测可信度评估
本文提供了一种使用自动测试设备 (ATE) 评估下机航空电子系统健康监测可信度的方法。指标包括假阳性、假阴性、真阳性和真阴性的概率。我们首次考虑了刺激信号源 (SSS) 的不稳定性、测量通道误差的随机和系统分量以及系统本身的可靠性特性。我们考虑了永久性故障和间歇性故障的指数分布的具体情况,并推导出计算可信度指标的公式。数值计算说明了正确和错误决策的概率如何取决于精度参数。我们表明,当刺激信号的标准差增加时,假阳性和假阴性的概率增加得比真阳性和真阴性的概率下降得快得多。对于甚高频全向测距 (VOR) 接收器,我们证明即使刺激信号源产生的随机误差为零,假阳性和假阴性的概率也不为零。