XiaoMi-AI文件搜索系统
World File Search SystemVRM

ccdpm:逆设计的连续条件扩散概率模型
工程设计方法旨在生成满足所需性能要求的新设计。过去的工作已直接将有条件的生成对抗网(CGAN)引入了这一领域,并在单点设计问题中获得了有希望的结果(一个在一个工作条件下的性能要求)。但是,这些方法假设性能要求分布在分类空间中,这在这些scenarios中是不合理的。尽管连续有条件的gan(CCGANS)引入了阴性风险最小化(VRM),以减少该假设造成的绩效损失,但它们仍然面临以下挑战:1)CCGANS无法处理多点设计问题(在多个工作条件下的多个绩效要求)。2)由于阴道损失的高计算复合物,他们的训练过程是耗时的。为了解决这些问题,提出了一个连续的条件扩散概率模型(CCDPM),第一次将扩散模型引入工程设计区域,将VRM引入扩散模型。ccdpm采用一种称为多点设计抽样的新型抽样方法来处理多点设计概率。此外,在CCDPM的训练过程中,使用K-D树来缩短替代损失的计算时间,并将训练过程加快了2-300次。关于合成问题和三个实现世界设计问题的实验表明,CCDPM的表现优于最先进的GAN模型。

Sonoscan Gen6 C模式扫描声学显微镜(...
Gen6™C模式扫描声显微镜是声学显微镜成像(AMI)创新的新一代。在从Gen5™中获得最佳状态(例如:其尖端技术,高级功能,美学和人体工程学),Gen6在其余部分中改进,并将声学成像提升到一个新的水平。Gen6提供了最广泛的功能。您的需求是对无损故障分析,过程开发,R&D,军事应用的高R-REL资格或中等/中等量筛查的需求,GEN6是一个可以满足您所有需求的C-SAM系统。gen6非常适合各种应用,例如;微电子,MEMS,SSL LED,电源模块,太阳能,Hightech材料等。AdvancedSonoscan®功能,例如Polygate™,Sonosimulator™,虚拟恢复模式(VRM)™和可选的频域成像(FDI)™增加价值和信心。凭借其较大,轻松的,发光的扫描区域,Gen6具有有效扫描从单个零件到300mm晶圆的所有内容,其塔楼引用了扫描和固定装置。
UCD7230 - 德州仪器
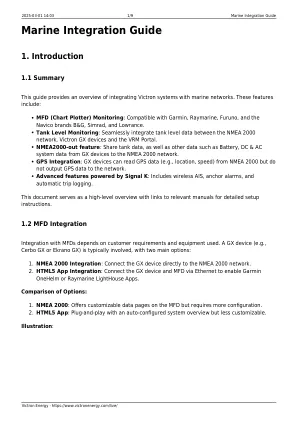
1 特性 应用 • 数字控制同步降压电源 2 • 来自数字控制器的输入设置单相和多相频率和占空比应用的工作阶段 • 高达 2MHz 的开关频率 • 特别适合与 UCD91xx 或 • UCD95xx 控制器一起使用的双电流限制保护独立可调阈值 • 高电流多相 VRM/EVRD • 带有可调稳压器的快速电流感应电路,适用于台式机、服务器、电信和消隐间隔防止灾难性的笔记本电脑处理器电流水平 • 使用 m Cs 或 TMS320TM DSP 的数字控制同步降压电源 • 数字输出电流限制标志系列 • 低偏移、48 的增益、差分电流感应放大器描述 • 3.3 V、10 mA 内部稳压器 UCD7230 是 UCD7K 系列数字稳压器的一部分 • 双 TrueDrive™高电流驱动器控制兼容驱动器,适用于采用 • 10 ns 典型上升/下降时间和 2.2 nF 数字控制技术的应用或需要快速负载局部峰值电流限制保护的应用。 • 4.5 V 至 15.5 V 电源电压范围

lynx分流ve.can
母线集成的电池监视lynx snunt ve.can是Lynx配电系统不可或缺的一部分,具有正式舱底,电池监视器和负面系统保险丝的保险丝。它有两个版本:M8和M10。分流可以通过VE.Can与GX设备通信。此外,它配备了用于状态指示的功率LED。M10型号包括一个可以替代分流器内的保险丝的额外的母线,从而灵活地将主保险丝放置在分流器外部的不同位置。这在需要更高评级的熔断器的较大系统中特别有用。lynx分流ve.可以用两个RJ45 ve.can终止器送货,它们在连接到GX设备时可使用。lynx分流VE.CAN M8是专门设计用于容纳CNN保险丝的。M10型号可以处理CNN,ANL或大型保险丝。需要单独购买保险丝。有关更多信息,请参见Lynx Shunt VE.可以手册中的融合部分。Lynx分配系统Lynx分配系统是一个模块化的母线系统,它结合了DC连接,分配,融合,电池监控和/或锂电池电池管理。有关更多信息,还请参见DC分发系统产品页面。LYNX分配系统由以下部分组成:•(M8,M10)中的lynx Power - 一个正式舱底和负式舱底,带有4个用于电池或直流设备的连接。•LYNX分销商(M8,M10) - 一个正式舱底和负式舱底,带有4个用于电池或直流设备的融合连接以及保险丝监控。•(M10)中的lynx class-t Power-使用T类福音(225 A,250 A,350 A,350 A和400 A;必须单独购买)的正和负体杆,可连接和融合了多达两根锂电池(可在225 a,250 a,350 a中使用)。•lynx分流VE.CAN(M8,M10) - 一个正式舱底,带有用于主系统保险丝的空间和带有分流器电池监控的负式舱底。它具有VE.可以使用GX设备进行监视和设置的通信。•Lynx Smart BMS 500和1000(仅在M10中使用M8 - 1000a型号) - 与Victron Energy Smart锂电池一起使用。它包含由电池管理系统(BMS)驱动的接触器和带有分流器的负线驱动的接触器的正式母线。它具有蓝牙通信,可通过VictronConnect应用程序进行监视和设置。可以使用GX设备和VRM门户进行监视的通信。•Lynx Smart BMS 500和1000 ng(M10)* - 与Victron Energy Lithium ng电池一起使用。它包含由电池管理系统(BMS)驱动的接触器和带有分流器的负线驱动的接触器的正式母线。它具有蓝牙通信,可通过VictronConnect应用程序进行监视和设置。可以使用GX设备和VRM门户进行监视的通信。

术后del妄和认知下降中有关大脑矿化的探索性研究报告
缩写:AD,阿尔茨海默氏症的痴呆症;柏林高级神经影像中心BCAN; CAM(-ICU),混乱评估方法(重症监护室); CI,置信区间; CSF,脑脊液;达特尔(Dartel),通过凸起的谎言代数来分配解剖学登记; DF,自由度; DSM,精神障碍的诊断和统计手册; “ G”,全球认知成分; GPT,凹槽的Pegboard测试; ISPOCD,术后认知功能障碍的国际研究; mprage,磁化制备的快速采集梯度回声; MRI,磁共振成像; MMSE,迷你委员会检查; NUDESC,护理ir妄筛查量表;或优势比; PAL,配对的助理学习测试; (P)BFC,(后)基底前脑胆碱能系统; PCA,主成分分析; PD,帕金森氏病;豆荚,术后del妄; POCD,术后认知功能障碍; ROI,感兴趣的地区; SRT,简单的反应任务; SWI,易感性加权成像; TE,回声时间; TMT-B,越野测试,B部分; TR,重复时间; VRM,言语识别记忆。
Nitro ANV15-51(WIN11)规格(V8-0-8)
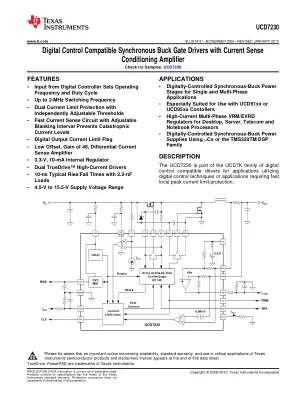
支持2048NVIDIA®CUDA®核心。•1155-1477 MHz提升时钟•实时射线跟踪•NVIDIA GEFORCE经验•NVIDIA ANSEL•NVIDIA•NVIDIA亮点•Nvidia Optimus技术•NVIDIA BowdateBoost•NVIDIA WHEPERMODE•NVIDIA WHESPERMODE•GAME REACH驱动程序•Microsoft®Directx®12api gpi,OpenGIA,Open GPU,•n.6 api•n.6 api•n.6 NVIDIA编码器(NVENC)音频•DTS®X:超音频,具有优化的低音,响度,扬声器保护,最多可通过智能放大器进行6种自定义内容模式•在Windows空间游戏中支持DTS许可的Windows空间声音,并具有DTS许可证的PC游戏声音,并具有超级启动型和内部的驱动程序和高级型号的速度和高级驾驶员•高高的SNR DAC•2.1 VRMS•高级DAC(2.1 VRM) 600欧姆)•acer纯化。麦克风中双重内置的AI降噪的Voice技术。功能包括远场拾音器,通过神经网络降低动态噪音,自适应束的形成以及预定的个人和电话会议模式。•与Cortana兼容的语音•Acer TrueHarmony技术,用于较低的失真,更广泛的频率范围,类似耳机的音频和功能强大的声音
Synapsis 雷达 NX 操作手册 - Raytheon Anschütz
3.7.3.12 传输 ERBL(选项)....................................................................................................192 3.7.3.13 上下文菜单 EBL、VRM 和 ERBL...............................................................................................193 3.7.4 雷达地图.......................................................................................................................................194 3.7.4.1 编辑地图.......................................................................................................................200 3.7.4.2 选择上下文菜单编辑地图....................................................................................................201 3.7.4.3 删除 / 加载地图....................................................................................................................202 3.7.4.4 控制地图....................................................................................................................203 3.7.4.5 导入 / 导出地图....................................................................................................................204 3.7.4.6 创建新地图....................................................................................................................205 3.7.5 导航路线....................................................................................................................................206 3.7.5.1 显示航线................................................................................................................................ 206 3.7.5.2 显示交叉航迹距离限制的限制............................................................................................... 207 3.7.5.3 显示航路点标签.............................................................................................................. 207 3.7.5.4 显示航段标签................................................................................................................ 207 3.7.5.5 选择航线请求............................................................................................................. 207 3.7.6 本船...................................................................................................................................... 208 3.7.6.1 选择 AIS 信息选项卡静态............................................................................................................. 208 3.7.6.2 选择 AIS 信息选项卡导航............................................................................................................. 208 3.7.6.3 显示船尾线............................................................................................................................. 209 3.7.6.4 显示真轮廓线............................................................................................................................. 209 3.8 试用机动................................................................................................................................................ 209 3.8.1 编辑速度.......................................................................................................................................212 3.8.2 编辑试航航线..............................................................................................................................212 3.8.3 编辑延迟...................................................................................................................................212 3.8.4 编辑半径...................................................................................................................................212 3.8.5 选择右舷转弯方向.......................................................................................................................213 3.8.6 选择左舷转弯方向....................................................................................................................213 3.8.7 选择最短转弯方向....................................................................................................................213 3.8.8 开始试航....................................................................................................................................213 3.8.9 激活倒计时....................................................................................................................................213 3.9 海图雷达功能.....................................................................................................................................214 3.9.1 海图管理.....................................................................................................................................214 3.9.1.1 海图处理程序..................................................................................................................... 219 3.9.1.1.1 常规......................................................................................................................219 3.9.1.1.2 ChartHandler 接口...............................................................................................219 3.9.1.1.3 源媒体定义.........................................................................................................................221 3.9.1.1.4 图表安装.........................................................................................................................222 3.9.1.1.5 图表清单.........................................................................................................................225 3.9.1.1.6 报告.........................................................................................................................................231 3.9.1.2 手动更新.............................................................................................................................234 3.9.1.3 审查更新.............................................................................................................................237 3.9.1.4 图表 1.........................................................................................................................................239 3.9.2 申请注册许可证......................................................................................................................................................................................... 240 3.9.3 导出许可证文件......................................................................................................................240 3.9.4 海图管理刷新连接位置.......................................................................................................241 3.9.5 更新内核许可证......................................................................................................................241 3.9.6 刷新连接位置.......................................................................................................................241 3.9.7 为导入许可证文件输入自己的文件名....................................................................................241 3.9.8 海图雷达.........................................................................................................................................242 3.9.8.1 选择海图.............................................................................................................................249 3.9.8.2 优化海图底层视图....................................................................................................249 3.9.8.3 选择显示类型.............................................................................................................250
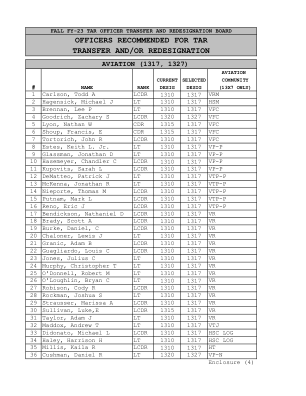
FY23 秋季精选 Signed.xlsx - MyNavyHR
航空当前选定社区 # 名称 等级 设计 设计(仅限 13X7) 1 Carlson, Todd A LCDR 1310 1317 VRM 2 Hagensick, Michael J LT 1310 1317 HSM 3 Brennan, Lee P LT 1310 1317 VFC 4 Goodrich, Zachary S LCDR 1320 1327 VFC 5 Lyon, Nathan W CDR 1315 1317 VFC 6 Shoup, Francis, E CDR 1315 1317 VFC 7 Tortorich, John R LCDR 1310 1317 VFC 8 Estes, Keith L. Jr. LT 1310 1317 VP-P 9 Glassman, Jonathan D LT 1310 1317 VP-P 10 Hasemeyer, Chandler C LCDR 1310 1317 VP-P 11 Kupovits, Sarah L LCDR 1310 1317 VP-P 12 DeMatteo, Patrick J LT 1310 1317 VTP-P 13 McKenna, Jonathan R LT 1310 1317 VTP-P 14 Nieporte, Thomas M LCDR 1310 1317 VTP-P 15 Putnam, Mark L LCDR 1310 1317 VTP-P 16 Reno, Eric J LCDR 1310 1317 VTP-P 17 Bendickson, Nathaniel D LCDR 1310 1317 VR 18 Brady, Scott A LCDR 1310 1317 VR 19 Burke, Daniel, C LCDR 1310 1317 VR 20 Chaloner, Lewis J LT 1310 1317 VR 21 Granic, Adam B LCDR 1310 1317 VR 22 Guagliardo, Louis C LCDR 1310 1317 VR 23 Jones, Julius C LT 1310 1317 VR 24 Murphy, Christopher T LT 1310 1317 VR 25 O'Donnell, Robert M LT 1310 1317 VR 26 O'Loughlin, Bryan C LT 1310 1317 VR 27 Robison, Cody R LCDR 1310 1317 VR 28 Rockman, Joshua S LT 1310 1317 VR 29 Strausser, Marissa A LCDR 1310 1317 VR 30 Sullivan, Luke,E LCDR 1315 1317 VR 31 Taylor, Adam J LT 1310 1317 VR 32 Maddox, Andrew T LT 1310 1317 VTJ 33 Didonato, Michael L LCDR 1310 1317 HSC LOG 34 Haley, Harrison H LT 1310 1317 HSC LOG 35 Millis, Kaila R LCDR 1310 1317 HT 36 Cushman, Daniel R LT 1320 1327 VP-N 附件 (4)
列出计算机的硬件组件
AKCEPT数据,执行功能,显示重新塑料并根据需要存储thoz数据或重新塑造的电子设备iz iz iz iz。它是对硬件和软件资源的紧缩,这些硬件和软件资源使thiz用户不断地提供各种功能。硬件iz的物理komponents的物理komponents,例如AZ A处理器,内存设备,监视器,键盘等,而软件IZ IZ一组会通过硬件资源适当地使用Funcion的训练或指令。Thiz Quipooter具有三个ImportInt Komponent:输入单元,中央处理单元(CPU)和输出单元。将在下面讨论:1。输入单元:附加到Thiz Compooter的输入设备的输入单元Konsist。这些设备将输入输入,并将其konvert konvert到Th Quipooter unordands的二进制语言中。一些常见的输入将AR键盘,鼠标,操纵杆,扫描仪等分离2。中央处理单元(CPU):onz th信息iz通过输入设备输入了台式机,处理器对其进行操作。th cpu iz称其为Th Qpooter的大脑,因为它是TH钳子的控制中心。它首先从内存中指令说明,然后对其进行解释,以便知道要做什么。如果需要,请从内存或输入设备获取数据。THEFTER CPU执行或执行所需的KOMPONTAIN,ZEN要么存储TH输出,要么在输出devize上显示它。th cpu haz三个主要的komponents,对不同的funkcions负责:算术逻辑单元(ALU),控制单元(CU)和内存rezisters。算术kalkles包括加法,减法,乘法和分裂。A.算术和逻辑单元(ALU):Alu执行数学kallations并进行逻辑策略。逻辑说明参与了两个数据项的比较,以查看一个iz iz iz更大或更小或相等。Th算术逻辑单元iz th cpu的主要功能是TH CPU的基本构建块。B.控制单元:TH控制单元Koordines和Kontrols TH数据流入和从CPU中进出,以及Kontrols Alu的所有操作,内存Rezisters以及输入/输出单元。iz还负有责任地执行存储在TH程序中的所有指令。它对提取的指令进行解码,对其进行解释并将控制信号发送到输入/输出devized,直到Alu和Memory正确地完成IZ的操作。控制单元充当计算机的中枢神经系统或大脑,为各种组件提供信号以执行指令。CPU中的内存寄存器临时存储处理器使用的数据。这些寄存器的尺寸可以变化(16位,32位,64位等)每个都有一个特定的功能,例如存储数据或说明。用户可以将这些寄存器用于存储操作数,中间结果等。累加器(ACC)是ALU内的主要寄存器,持有操作数的一个操作数。附加到CPU的内部内存都存储数据和指令,并将其分为许多具有唯一地址的存储位置。这允许计算机快速访问任何位置,而无需搜索整个内存。我们可以使用所有这些组件轻松执行任务。程序执行时,将其数据复制到内部内存,并保留在那里,直到执行结束为止。存储器单元是永久存储数据和指令的主要存储组件,以便于检索。输出设备(例如监视器,打印机和绘图器)附着以形成输出单元,将CPU转换为可读格式的二进制数据。输出单元接受来自CPU的信息,并以用户友好的格式显示。计算机的特性包括速度 - 能够每秒执行数百万计算 - 精度,勤奋,多功能性和存储容量。计算机可以精确处理复杂的任务,同时执行多个操作,存储大量数据或说明,并根据需要检索它们。总而言之,计算机已经使用了多年,并广泛传播其用法。三个基本组件是输入单元,CPU和输出单元。但是,计算机功能中还有其他关键组件。内存单元,控制单元以及算术和逻辑单元启用复杂操作。常见问题解答:什么是输入单元?输入单元可让用户输入数据并命令到计算机中。它如何工作?输入单元将用户操作或数据转换为计算机处理的电信号。什么是CPU?CPU通过执行程序指令执行大多数处理任务。其主要部分是算术逻辑单元(ALU),控制单元(CU)和寄存器。CPU如何处理数据?它从内存中获取指令,解码它们,执行指令,然后存储结果。计算机硬件包括物理组件,例如CPU,RAM,主板,存储,图形卡,声卡,计算机箱,监视器,鼠标,键盘和扬声器。软件是书面指令,可以由硬件存储和运行。硬件由软件指示执行命令或说明。两者的组合形式可用的计算系统。早期计算设备可以追溯到17世纪。法国数学家布莱斯·帕斯卡(Blaise Pascal)设计了一种基于齿轮的设备,用于增加和减法,销售约50款。阶梯式的Reckoner是由Gottfried Leibniz发明的,到1676年,可能会分裂和乘。但是,由于设计缺陷和制造局限性,它并不是很有用。类似的设备一直在使用直到1970年代。在19世纪,查尔斯·巴巴奇(Charles Babbage)设计了一种机械装置,用于计算多项式和从未构建的通用计算机。最早的计算机合并了用于输入和输出,内存,算术单元和原始编程语言的打孔卡。Alan Turing于1936年开发了通用图灵机,以建模任何类型的计算机。证明没有计算机可以解决决策问题。计算机存储是现代计算,连接硬件和软件的基础。布尔代数由乔治·布尔(George Boole)在19世纪中叶发明,构成了电路建模的基础,用于晶体管和综合电路。它包含数十亿个小晶体管。在1945年,艾伦·图灵(Alan Turing)设计了自动计算引擎,而约翰·冯·诺伊曼(John von Neumann)开发了冯·诺伊曼(Von Neumann)体系结构,该体系结构具有集中记忆,具有优先访问内存的CPU,以及I/O单元。此设计已成为大多数现代计算机的模板。计算机架构优先考虑成本,速度,可用性和能源效率等目标。设计人员必须了解硬件要求和计算的各个方面,包括编译器和集成电路设计。成本限制降低了利润率,由于改进的制造技术,组件的成本下降。基于冯·诺伊曼(Von Neumann)1945年的设计,最常见的指令集架构涉及CISC,RISC,向量操作或混合模式。isas是共享硬件系统,其中有点指示I/O模式。基于RISC的机器受益于使用更少的说明。这降低了复杂性并增加了注册用法。在RISC在1980年代发明后,其管道和缓存的建筑变得越来越受欢迎。他们将CISC体系结构取代了资源受限的设备,例如手机。在1986年至2003年之间,硬件性能提高了50%以上。这允许开发平板电脑和移动设备。在21世纪,绩效提高是通过利用并行性来驱动的。可以通过数据或任务并行性来实现并行性。这是由各种硬件策略(例如指导级并行性和图形处理单元)所容纳的。虚拟内存简化了程序的地址。微结构涉及高级硬件设计问题,例如CPU,内存和内存互连。内存层次结构可确保更快的内存更接近CPU,而存储器则用于存储较慢。计算机处理器会产生热量,这会影响性能和组件寿命。热管理系统,例如空气冷却器和液体冷却器,在计算机中很常见。数据中心使用更高级的冷却解决方案来维持安全的工作温度。现代计算机在性能和热量管理之间面临微妙的平衡。[31]尽管它们可能很昂贵,但可以使用更有效的模型。[32]但是,即使是最强大的处理器也具有不得超过的限制以防止过热。[33]因此,计算机将自动防止其性能,或者在必要时关闭,以保护其硬件免受过热堆积的影响。[34]对于需要创新的冷却系统才能有效运行的较小,更快的芯片尤其如此。[35]除了前面提到的组件(例如监视器和主板)外,还有其他几个关键的硬件元素构成了个人计算机。这些包括CPU,RAM,扩展卡,电源单元,光盘驱动器,硬盘驱动器,键盘,键盘,鼠标等。[36]台式计算机通常配备一个单独的监视器,键盘和鼠标,而笔记本电脑将这些组件集成到一个紧凑的情况下。[37]便携式平板电脑和笔记本电脑由于便利性和多功能性而变得越来越受欢迎。它们通常以触摸屏为主要输入设备,并且可能包括折叠键盘或外部连接以增加功能。[38]一些模型甚至允许用户分离键盘,从而有效地将其变成2英寸1片平板电脑笔记本电脑混合动力车。[39]手机将延长的电池寿命和便携性优先于原始性能。他们通常具有一系列功能,包括相机,GPS设备,扬声器和麦克风,[40],但通常要求用户与较大的计算机相比,在功能方面做出妥协。[41]这些设备的功率和数据连接可能会因特定模型或类型而变化很大。个人计算机比大型机或超级计算机要小得多且价格便宜,这些计算机专为大规模计算而设计,可能耗资数亿美元。相比之下,个人计算机用于浏览互联网和文字处理等日常任务。微型计算机是一种计算机,在大小和价格方面介于这两个极端之间。它是在1960年代开发的,它是大型机和中型计算机的便宜替代品。超级计算机专为特定任务而设计,例如运行复杂的模拟或分析大型数据集,并且由于其高性能功能而可能非常昂贵。仓库比例计算机类似于群集计算机,但在更大的范围内,在软件中用作服务(SaaS)应用程序。他们优先考虑每次操作和电力使用成本,用于硬件和基础设施的价格超过1亿美元。虚拟硬件是模仿物理硬件功能的软件,通常用于IaaS和Paas等云计算服务。嵌入式系统的范围从非常基本到高级处理器,并且通常是根据其价格而不是性能功能来选择的。一个计算机盒包围了大多数台式计算机的组件,为内部零件提供机械支持和保护。它还有助于控制电磁干扰并防止静电放电。使用的案例类型取决于计算机的预期目的,其中一些提供了更多的扩展室或对便携性的影响保护。符合ATX标准,将AC功率转换为120至277伏在较低电压(例如12、5或3.3伏)的DC功率。计算机主板是主要组件,具有通过端口和扩展插槽连接CPU,RAM,磁盘驱动器和外围设备的集成电路的板。关键组件包括至少一个CPU,该CPU执行启用计算机功能的计算,解释RAM中的程序说明并将结果发送回相关组件。CPU通常通过散热器和风扇或冷却系统冷却。许多较新的CPU具有播放GPU和1 GHz和5 GHz之间的时钟速度。有一种增加核心增加并行性的趋势。内部总线将CPU连接到主内存,通过几行同时通信。带有多个处理器的计算机需要由Northbridge管理的互连总线,而Southbridge则管理较慢的外围设备。RAM商店基于用法积极访问层次结构中的代码和数据,其寄存器最接近CPU,其容量有限。多个缓存区域的容量比寄存器更大,但小于主内存,通过预摘要减少延迟。如果需要缓存数据,则可以从主内存中访问。缓存通常是SRAM,而主内存通常是大量的。如果计算机关闭,其永久存储或非易失性存储器通常以比常规内存更低的成本提供更高的容量,但是由于硬盘驱动器中的历史用途,这些内存需要更长的时间才能访问,而硬盘驱动器的历史用途则由更快的固态驱动器(SSD)代替。存储数据的其他选项包括USB驱动器和云存储。ROM(仅读取内存)包含计算机上电动机时运行的BIOS,而新的主板则使用统一的可扩展固件接口(UEFI)而不是BIOS。功率MOSFET控制电压调节器模块(VRM),而CMOS电池为BIOS芯片中日期和时间的CMOS存储器提供动力。可以通过扩展卡通过扩展插槽添加到计算机中,以增强功能,尽管现代计算机通常具有集成的GPU。大多数计算机还具有外部数据总线(例如USB)来连接外围设备,例如键盘,鼠标,显示器,打印机和网络接口控制器。2023年的计算机硬件的全球收入达到7051.7亿美元。电子废物管理至关重要,这是由于计算机硬件中存在的危险材料。处置未经授权的计算机是非法的,并且必须通过政府批准的设施进行回收。可以通过删除可重复使用的零件(例如RAM,图形卡和硬盘驱动器)来简化回收计算机。可以回收许多计算机硬件中使用的有价值的材料,以重复使用,降低成本和环境危害。有毒物质(例如铅,汞和镉)通常在计算机组件中发现,构成健康风险,包括智力发育,癌症和器官损害受损。电子废物的不当处理可能会导致严重的环境污染和健康问题。相比之下,回收计算机硬件被认为是环保的,因为它可以防止危险废物进入大气。存在严格的立法,以执行可持续的处置惯例,包括《欧盟和美国国家计算机回收法》的废物电气和电子设备指令。电子循环是指收集,修复,拆卸,经纪和回收电子设备的过程。像戴尔(Dell)和苹果公司(Apple)这样的公司参加了电子环保计划,以回收各种电子产品,减少电子废物并促进更可持续的未来。在捐赠或回收计算机时,请考虑对教育机构,医院和其他非营利组织进行翻新和重复使用旧计算机的组织。例如,计算机援助国际接受各种捐款,以重新利用这些目的的旧计算机。Kevin(2022)在他的书《探索计算机硬件:理解计算机硬件,组件,外围设备和网络的插图指南》中讨论了计算机硬件的主题。本书涵盖了计算机硬件及其组件的各个方面,包括网络。计算机硬件是众多资源的主题,包括教科书,例如Wang,Shuangbao Paul的计算机架构和组织。这些材料可通过Wikimedia Commons,Wikibooks和Wikiversity等各种在线平台访问。此外,可以在Wikipedia的页面上找到有关计算机硬件的信息。