XiaoMi-AI文件搜索系统
World File Search SystemViewpoint


Viewpoint 用户指南
此搜索功能由不同的目录和子集(也称为代码集)驱动。以下是术语搜索目录中列出的代码集:• AMA CPT 免疫子集:疫苗相关 CPT 程序代码目录• CDC 疫苗制造商 (MVX):疫苗制造商 MVX 代码目录• CDC 疫苗接种:CDC 疫苗接种 CVX 代码目录• CDC 疫苗组:用于分组疫苗 CVX 代码的代码目录• CDC 疫苗信息声明:当前和历史疫苗信息声明目录• CDC 疫苗产品:疫苗商品名及其相关 CVX 和 MVX 代码目录• FDA NDC 免疫销售单位:NDC 销售单位(包装)目录• FDA NDC 免疫使用单位:NDC 使用单位(小瓶/注射器)目录
软件成本 - 普华永道观点
本出版物仅供一般参考之用,并不构成针对任何个人或实体的特定事实和情况的专业建议。您不应在未获得具体的专业建议的情况下根据本出版物中包含的信息采取行动。对于本出版物中包含的信息的准确性或完整性,不作任何明示或暗示的陈述或保证。本出版物中包含的信息并非旨在或以书面形式用于逃避任何政府或其他监管机构施加的处罚或制裁,也不能用于此类目的。普华永道会计师事务所、其成员、员工和代理人对任何依赖本出版物中包含的信息而遭受损失的个人或实体概不负责。随着新指南或解释的出现,本出版物的某些方面可能会被取代。财务报表编制者和其他用户
观点 患者-临床医生的转变... - NSF-PAR
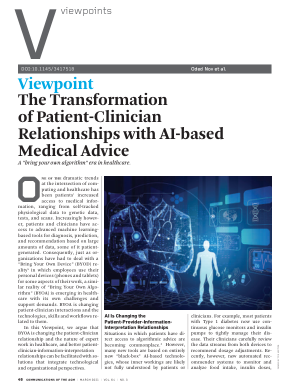
计算与医疗保健交叉领域的一个显著趋势是患者获取医疗信息的渠道越来越多,从自我跟踪的生理数据到基因数据、测试和扫描。然而,患者和临床医生越来越多地能够使用基于机器学习的高级工具,根据大量数据(其中一些数据由患者生成)进行诊断、预测和推荐。因此,正如组织必须应对“自带设备”(BYOD) 的现实 5,即员工使用个人设备(手机和平板电脑)来完成某些工作一样,类似的“自带算法”(BYOA) 现实正在医疗保健领域出现,它有自己的挑战和支持需求。BYOA 正在改变患者与临床医生之间的互动以及与之相关的技术、技能和工作流程。在这个观点中,我们认为 BYOA 正在改变患者与临床医生的关系以及医疗保健领域专家工作的性质,并且可以通过整合技术和组织观点的解决方案促进更好的患者-临床医生信息解释关系。
软件成本 - 普华永道观点
本出版物仅供一般参考之用,不构成针对任何个人或实体的特定事实和情况的专业建议。未获得具体的专业建议,您不应根据本出版物中包含的信息采取行动。对于本出版物中包含的信息的准确性或完整性,不提供任何明示或暗示的陈述或保证。本出版物中包含的信息并非旨在或以书面形式用于避免任何政府或其他监管机构施加的处罚或制裁,也不能用于此类目的。普华永道会计师事务所、其成员、员工和代理人对任何依赖本出版物中包含的信息而遭受的任何损失概不负责。随着新指南或解释的出现,本出版物的某些方面可能会被取代。财务报表编制者和其他用户

EBU 观点 - 数字广播的未来
当今,广播电台在世界各地仍然非常受欢迎,这在很大程度上要归功于其免费且几乎在任何地方都可以轻松访问的独特品质。平均每周,广播覆盖许多欧洲国家 90% 以上的人口(EBU 报告:公共广播和新媒体平台 2011),正是这种持久的受欢迎程度让广播电台在欧洲社会中如此牢固地扎根。这也是为什么广播电台如今已成为欧洲经济不可或缺的一部分;数百万广播电台、记者、广告商、技术人员和设备/技术制造商都依靠广播电台的收入生活。但广播电台的成功不仅仅在于收入。广播是最便宜、最可靠、最具包容性的广播媒体,每天为数百万人带来重要信息和文化。

观点:计算新时代的物理学
量子力学是物理学最基础的领域,20 世纪的大多数发现和发明都源自该领域,在 21 世纪仍发挥着重要作用。量子力学的基础形成于 1900 年至 1930 年之间(普朗克,1943 年;玻尔,1922 年;布罗意,1929 年;海森堡,1933 年;薛定谔,1933 年;狄拉克,1933 年;爱因斯坦,1923 年)。众所周知,每个原子的结构都是由量子力学决定的。量子力学的引入使得人们能够理解宇宙的基本定律,具有重大的经济意义。正如伟大的物理学家保罗·狄拉克在 1929 年所说,原则上,化学可以用量子力学理论来解释。事实上,所有化学和材料科学课程以及物理课程都包含量子力学。物理学传统上启发了其他科学研究领域,并为该领域的进步做出了重大贡献。1950 年至 1960 年间,分子生物学的诞生表明量子力学和物理学(Schrödinger,1944 年;Davies,2008 年)。这启发了生物学家弗朗西斯·克里克、詹姆斯·沃森和莫里斯·HF·威尔金斯利用这些定律发现 DNA(Crick,1962 年;Walt,1962 年;Wilkins,1962 年),以及生物物理学家马克斯·德尔布吕克、阿尔弗雷德·D·赫尔希和萨尔瓦多·E·卢里亚发现与病毒的复制机制和遗传结构相关的内容(Delbrück,1969 年;Hershey,1969 年;Luria,1969 年)。量子力学对于设计固态设备(如晶体管,作为任何电子设备和计算机的构建块)是必不可少的。在量子力学和相对论出现之前,仅使用经典物理学是无法对半导体或任何材料进行合理理解的。所谓的量子电动力学描述了激光和光与物质的相互作用,这归功于量子电动力学的基本工作(Schwinger,1965 年;Feynman,1965 年;Tomonaga,1966 年)。基本粒子物理学

观点:将玻璃返回供应链
回收扁平玻璃的收益约占英国玻璃市场的24%(图1)。制造商始终将效率视为保持竞争优势的一种方式。这采取了技术改进的形式,以最大程度地减少加工产量损失,炉子技术的进步和燃油转换,现场能量效率的改善和废热恢复过程。玻璃碎片称为Cullet是玻璃制造过程的关键部分。Cullet在熔融阶段有助于批处理原材料的均质化,还可以帮助控制粘度水平。Cullet还带来了环境的好处。|它降低了材料的熔化温度。|由于碳酸盐原材料的减少,在热分解过程中释放了CO 2的副产品,因此它减少了CO 2排放。|它减少了对原材料的需求。

观点:新作物科学的吸收
新作物科学的应用通常会广泛传播以达到农场,但有时却没有。绿色革命种子在1960年代和1970年代首次发行,被广泛迅速地吸收,但是1990年代首次发行的转基因GMO种子也表现良好,仍然受到了极大的限制。经过二十多年,全球所有转基因生物土地中有84%仍然只在四个西半球国家中,而总英亩中有97.2%的土地只种植了四种农作物。存在或不存在六个“成功因素”可以解释这些不同的吸收轨迹。成功因素是1)关于迫切需要促进粮食生产的广泛社会协议,2)农民在种植新种子时对农民的直接而明显的好处。3)在生产和交付新技术的机构中的社会信任时,4)缺乏新的消费者食品安全关注,5)缺乏对环境倡导组的有组织的反对派的不断变化的基因群体,以及一个简单的种子群体和6)一项新的播种事物,而又一次of 6)又是一个新的种子群体。绿色革命种子享受了所有这些成功因素,而转基因生物只享受了六个。这种相同的方法可用于预测基因组编辑的作物的未来吸收,这表明了六个成功因素中的三个,预测摄取速度的速度比绿色革命慢,但比GMO更宽,更快。对基因组编辑种子做出的民族监管决定的初步扫描可以加强这一预测。

PHD 商会观点 GDP 增长 7.8% ...
2023-24 财年第一季度 GDP 增长数据 按不变价格 (2011-12) 计算,2023-24 年第一季度的 GDP 估计为 403.7 亿卢比,而 2022-23 年第一季度为 374.4 亿卢比,增长率为 7.8%。 按现行价格计算,2023-24 年第一季度的 GDP 估计为 706.7 亿卢比,而 2022-23 年第一季度为 654.2 亿卢比,增长率为 8.0%。 按基本价格计算,2023-24 年第一季度的 GVA 为 638.2 亿卢比,而 2022-23 年第一季度为 590.9 亿卢比,增长率为 8.0%。