XiaoMi-AI文件搜索系统
World File Search SystemVis

所有疫苗信息声明 (VIS) 的二维码链接
CDC 制作的 VIS 向接种者解释了疫苗的好处和风险。联邦法律要求医疗保健人员在每次接种某些疫苗之前向患者、父母或法定代表人提供最新的 VIS(英文版)。此资源包括所有已发布的联邦 VIS 的二维码和 RSV 预防抗体的免疫信息声明 (IIS)。

一种多光谱UV-VIS吸收技术,用于燃烧燃料膜和烟灰的定量高速场序列成像
非蒸发的液体燃料膜是汽油直接注入发动机烟灰形成的主要原因。在这项研究中,开发了一种UV-VIS吸收技术,以在加热的恒流实验中直接注射后的燃料膜厚度成像。一个六孔GDI喷油器将燃料在100栏上喷涂到距喷嘴30毫米的透明板上。燃料由30%甲苯 / 70%的Iso-octane(分别为383和372 K)组成。气体和壁温度分别为376和352 K,气压1 bar。燃料的蒸发部分被点燃,随后的燃烧膜旁边的燃烧导致了烟灰的形成。在加剧的高速CMOS摄像头上成像了从脉冲LED照明中传输散射的背光。液态甲苯的紫外线吸光度为265 nm的LED。然而,在这种波长下,甲苯蒸气吸收,液体散射,烟灰和烟灰前体的灭绝以及烟灰白幕都干扰了液体燃料的吸光度。为了估计散射和烟灰消光的贡献,将310、365和520 nm处的LED添加到梁路径中,并以32 kHz的帧速率在高速摄像头上与连续的帧相吻合。获得了一个深色框架以说明烟灰阴影,以使所得5图像序列的重复速率为6.4 kHz。通过在先前的工作中开发的形态图像处理估算了甲苯蒸气的吸收,以将弥漫性的,移动的蒸气云与燃料膜的锋利,固定特征分开。允许获得时空分辨的燃油膜厚度测量和有关烟灰的其他信息的多光谱方法。

根据DIN 38409-60(EN)(EN)探测叶绿素A浓度以监测地表水中的奖杯变化。
引言UV/VIS分光光度法是水质分析中广泛使用的技术。除了检测到标准水参数(例如磷,铵和硝酸盐)[1]之外,它对检测植物色素(例如叶绿素,植物蛋白酶和黄友基因)特别有用。[2]在此,Analytik Jena在UV/VIS分光光度法中的长期经验结合了合适的分光光度计性能和软件以及正确的附件托盘,从单样本到自动化解决方案。在这方面,Specord 50 Plus分光光度计结合了操作中的简单性和出色的光谱性能以及自动化功能。在DIN 38409-60中采用了通过叶绿素监测的分光光度测量量化的块奖杯度(浮游植物或蓝细菌的生长):“叶绿素的光谱测定水中的浓度”作为德国标准方法的一部分

构建循环供应链并根据 REP 领域进行定位
这里提出的反思工作旨在展示如何将这种通过流动实现循环经济的方法转化为一个结构模型,该模型综合了不同的文献资料,其中我们可以发现对循环供应链的呼吁[1],价值金字塔(根据主要的7R)[3],以及向10R的演变[2]。该模型旨在展示允许SCC成为“高循环性”运营核心的主要结构,通过尽可能确保在使用过程中最大限度地保存材料的价值,通过追求提高产品和材料使用效率的目标,然后尽可能地限制在“使用结束时”的价值损失,无论考虑的产品和材料及其状态如何。首先,我们将努力对循环供应链 (SCC) 提供一个共识和科学的定义,然后描述包括 REP 部门在内的再处理部门的 SCC 需求。然后,第二步,将通过阿赫特伯格金字塔 [3] 的初始棱镜来解决流动的循环性问题,但尽量详尽地考虑 10R 命令。目标是在 REP 部门和 SCC 解决方案的结构之间建立联系,以便在转型中取得最佳成功

帕金森氏病:一种病理生理学和刺激治疗
摘要帕金森氏病的病因未知,其特征是体征和症状,例如僵硬,肌动脉症,胸肌,震颤,姿势不稳定等。需要在疾病管理方面进行更有效的演变,鼓励对该项目进行阐述,该项目通过文献综述旨在对近年来对帕金森氏病的治疗进行更深入的深入研究深度脑刺激(DBS)和程序演变。通过该项目,分析了可能提高患者质量和预期寿命的疾病,症状和可用治疗方法以及有前途的治疗方法,旨在减少可能的后遗症和非药物治疗的早期发作。重点介绍了近年来最有效的手术程序,深度脑刺激(DBS)获得了更好的结果。方法涉及搜索以英语和葡萄牙语发表的系统修订和荟萃分析,在PubMed,Lilacs,Scielo和Google学术数据库中搜索解决该主题的学术数据库。此外,在相同基础上的一般搜索中找到的工作与相同的关键字一起使用,但可以解决其在标题和摘要中的使用。得出的结论是,DBS是一种有益的治疗方法,可以显着改善帕金森氏症患者的生活质量。但是,当药物治疗变得无效并开始造成的弊大于患者时,最终将使用它。关键字:帕金森氏症;运动障碍;治疗;病理。摘要帕金森氏病具有未知的病因,其特征是符号和症状,例如刚度,敏锐性,心肌,颤音,震颤,姿势不稳定等。需要进行更有效的疾病管理发展发展,该项目旨在通过文献综述,以进行更深入的大脑刺激(DBS)(DBS)以及近年来治疗帕金森氏病的程序的进化。通过疾病,症状,可用治疗和预期的治疗方法,该疾病的治疗可能会构成良好的疾病。后遗症和非药物治疗的早期开始。将重点放在近年来最有效的外科手术程序上,深度脑刺激(DBS)取得了更好的结果。搜索以英语和葡萄牙语发表的系统评价和荟萃分析的方法,在数据库PubMed,Lilacs,Scielo和Google Scholar中,涉及该主题。此外,还包括在相同数据库中的一般搜索中发现的研究,但还包括关注它们在标题和摘要中的使用。得出的结论是,DBS是一种有益的治疗方法,可以显着改善帕金森氏症患者的生活质量。但是,当药物治疗变得无效并开始对患者带来更多弊大于利时,它被用作最后的手段。关键字:帕金森氏症;运动障碍;治疗;病理。

用户对移动运营商和Internet-2024 Edition的满意度(2024年4月24日)
•自创建以来,Arcep已收到了电子通信服务用户的请求(自2017年以来超过25万)。通过“ Ilete the Arcep”平台收集,并被归类为问题,这些举重提供了当局的可见性,尤其是在遇到的功能障碍方面。每年出版资产负债表。

供应链管理及其与战略关系观的联系
作者:Priscila Laczynski de Souza Miguel、Luiz Artur Ledur Brito 摘要 供应链管理作为一个理论领域,可以看作是一个正在整合的领域,正在经历从更实际和管理的开始阶段向对其组成结构的更严格定义的阶段的过渡。从这个意义上来说,与其他领域的理论基础的联系巩固了该领域,并将其整合为更广泛的理论体系。虽然交易成本理论和处理关系的组织理论在理论基础中得到越来越多的应用,但战略的关系观点仍然很少得到探索。关系观可以被认为是资源型观的延伸,而资源型观已经成为战略管理领域的主导理论范式。应用于供应链,它可以补充交易成本理论,除了寻求降低成本的机会之外,还可以识别在关系中创造价值或使用关系资源寻求竞争优势的可能性。本文试图通过确定 Dyer 和 Singh (1998) 提出的关系愿景的支柱如何帮助解释供应链管理现象并证明其有可能成为组织竞争优势的来源,来建立这两个领域之间的关系。简介自 20 世纪 80 年代以来,供应链管理 (SCM) 的讨论一直受到学术界的关注,这一点从运营领域的三大国际期刊《国际运营与生产管理杂志》(IJOPM)、《运营管理杂志》(JOM)和《生产与运营管理》(POM)的出版物中可以看出,它们最近都为该主题开设了专题(IJOPM,2006 年,第 7 卷;JOM,2007 年,第 27 卷,第 5 期和 POM,2006 年,第 15 卷,第 13 期)。关于该主题的研究数量从 90 年代末开始增加,证实了其在作战领域的相关性(PILKINGTON;FITZGERALD,2006 年;KOUVELIS、CHAMBERS AND WANG,2006 年)。实践中,一些公司开始采用供应管理技术来提高其绩效(COUSINS;LAWSON;SQUIRE,2006)。供应链管理作为一个知识领域,正处于理论巩固和转变的过程中,从一个更注重实践和管理的领域开始,成为一个建立在其他知识领域之上并与之相连的独立领域。根据 Burgess、Singh 和 Koroglu (2006) 的研究,该领域发表的 20% 的文章并非基于任何明显的理论观点。其余关于供应链管理的学术研究从不同的理论角度解释了这一主题,其中交易成本和竞争优势理论最受欢迎(分别为 29% 和 24%)。证据表明,目前还没有新的理论来描述 SCM,而且,由于其范围,无法从单一的角度进行解释(BURGESS;SINGH;KOROGLU,2006)。

常规推荐疫苗信息声明 (VIS) 的二维码链接
CDC 制作的 VIS 向接种者解释了疫苗的好处和风险。联邦法律要求医疗保健人员在每次接种某些疫苗之前向患者、父母或法定代表人提供最新的 VIS(英文版)。此资源包括一组有限的 VIS QR 码,用于 CDC 推荐的儿童或成人免疫接种计划中列出的疫苗和预防性抗体。
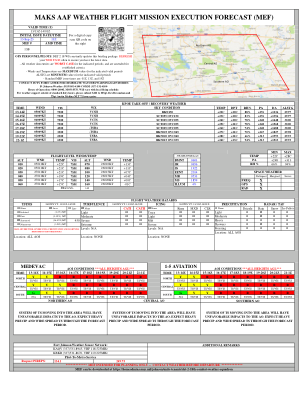
MAKS AAF 天气飞行任务执行预报 (MEF)
时间 13-14Z 14-15Z 15-16Z 16-17Z 17-18Z 18-19Z 19-20Z 20-21Z 21-1Z 时间 13-14Z 14-15Z 15-16Z 16-17Z 17-18Z 18-19Z 19-20Z 20-21Z 21-1Z 年 YYRRRRRRRYYRRRRRR TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS YYYRRRRRRRYYYRRRRRR TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS GYYRRRRRRRGYYRRRRRRRN/A TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS N/A TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS TS/VIS
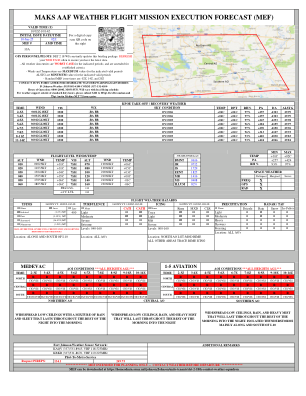
MAKS AAF 天气飞行任务执行预报 (MEF)
时间 2-3Z 3-4Z 4-5Z 5-6Z 6-7Z 7-8Z 8-9Z 9-10Z 10-14Z 时间 2-3Z 3-4Z 4-5Z 5-6Z 6-7Z 7-8Z 8-9Z 9-10Z 10-14Z RRRRRRRRRRRRRRRR CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS RRRRRRRRRRRRRRRRRR CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS RRRRRRRRRRRRRRRR TS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VISTS/CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS CIG/VIS