XiaoMi-AI文件搜索系统
World File Search SystemVisualisation
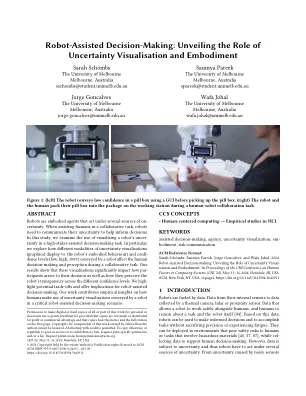
机器人辅助决策:揭示不确定性可视化和具体化的作用
机器人是具有具体行为能力的智能体,会在多种不确定性因素下行动。在协助人类完成协作任务时,机器人需要传达它们的不确定性以帮助做出决策。在本研究中,我们研究了在高风险辅助决策任务中可视化机器人不确定性的使用情况。具体来说,我们探讨了机器人传达的不同不确定性可视化形式(图形显示与机器人的具体行为)和置信度水平(低、高、100%)如何影响人类在协作任务中的决策和感知。结果表明,这些可视化显著影响了参与者如何做出决策,以及他们如何看待机器人在不同置信度水平下的透明度。我们强调了潜在的权衡,并为机器人辅助决策提供了启示。我们的工作为人类如何在关键的机器人辅助决策场景中利用机器人传达的不确定性可视化提供了实证见解。
技术报告9评估和增强多飞机运动物的任务模拟和可视化
天体动力学模拟为太空任务计划和操作提供了至关重要的意见。对任务配置的交互式可视化,特别是对于多飞机运动物的星座或形式而飞行的方案,在理解选项和将结果传达给各种最终用户或受众群体方面都起着重要作用。尽管理想化的轨道动力学的数学基础已经充分了解,但实际上,航天器轨道更为复杂。这包括诸如卫星与当地空间环境(例如空气动力)之间的相互作用或日益拥挤的轨道区和碎屑场的影响,这可能需要突然的轨道变化以避免碰撞。任务模拟现在必须同时考虑单个卫星和多飞机运动物配置,其中可能包括共享在多孔/多传感器形成中飞行的轨道或卫星的星座。

单元格中的信号:用于治疗的多模式和上下文化的机器学习基础
在空间测量多模式数据的能力中,可以为在转录,翻译和代谢水平上全面探索分子调节的前所未有的机会,以获取对基于健康和疾病的细胞活动的见解。但是,目前缺乏分析工具来整合不同空间 - 词素数据模式的互补信息,尤其是在空间代谢组学数据方面,这变得越来越宝贵。我们介绍了SPAMTP,这是一种多功能软件,该软件实现了空间代谢组学和转录组学数据的端到端集成分析。基于R,SPAMTP Bridges处理功能,用于来自Cardinal的代谢组学数据,并在Seurat中实施了以用户友好的细胞为中心分析。此外,SPAMTP的综合分析管道涵盖(1)自动质量到电荷比(M/Z)代谢物注释; (2)广泛的基于代谢物的下游统计分析,包括差异表达,途径分析和相关分析; (3)综合空间词分析; (4)一套可视化函数。为了灵活性和互操作性,SPAMTP包括用于数据导入/导出和对象转换的各种功能,从而可以与其他R和Python软件包无缝集成。我们证明了SPAMTP通过分析两个生物系统来吸引新的生物学理解的实用性。我们认为,该软件和实施方法将广泛用于空间多媒体和空间代谢组学分析中。
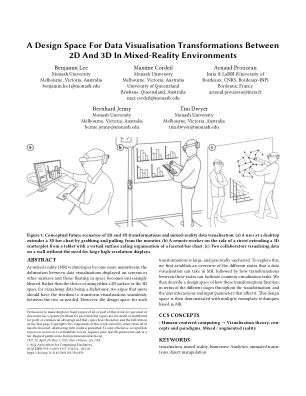
混合现实环境中 2D 和 3D 之间数据可视化转换的设计空间
在计算机图形学出现之前,抽象数据大多以 2D 形式表示,用于报告、书籍或海报的发布。同时,3D 表示仅限于空间数据的物理构造,如地理地球仪、化学、医学或建筑模型。具有合理图形能力的第一波台式计算机导致投射到 2D 屏幕上的 3D 数据表示激增。这可以说导致了 3D 图形的过度使用——例如 Tufte 和其他人非常讨厌的经典免费 3D 图表——早期对 2D 屏幕上 3D 可视化的研究证明了它们的局限性。此后,这导致信息可视化研究界在很长一段时间内围绕 2D 表示巩固信息可视化设计空间,以最佳方式安排 2D 屏幕。近年来,随着混合现实 (MR) 技术的兴起,我们需要重新考虑一些关于数据可视化“自然栖息地”的假设。混合现实 (MR) 耳机,例如 Microsoft HoloLens 2,终于实现了无线、强大的空间跟踪和具有合理视野的高分辨率立体渲染。这些耳机现在还可以了解其环境,映射房间中的表面并跟踪其用户的手势。我们可以渲染在环境中任何表面上明显投射的 2D 类图形,渲染从所述表面明显突出的 2.5D 类图形,或将它们悬浮在我们周围的 3D 空间中 - 所有这些都同样轻松且保真(图 2)。这项新功能为我们提供了沉浸式环境中数据可视化的新设计选择和可能性——也称为沉浸式分析 [ 10 , 41 ]。当然,我们应该继续以最佳方式可视化数据,无论是在 2D 表面还是在 3D 空间中。然而,借助 MR 提供的灵活性,我们可以考虑任何给定的可视化如何在两个环境(表面或空间)之间自由移动,以满足用户的需求。想象一下,只需用手抓住并拉动显示器中的 2D 可视化,即可将一些数据编码到第三空间维度(图 1a),从而将 2D 可视化暂时从显示器中挤出到 3D 中,或者从平板电脑中挤出可视化并将其悬浮在您面前的空间中(图 1b)。这些可视化还可以放置在任意表面上,模仿大型墙壁大小的 2D 显示屏,同时保留 3D 的灵活性(图 1c)。与此相反,我们还可以将 3D 可视化平面化为表面上的 2D,例如通过应用投影或创建横截面视图。在沉浸式环境中支持表面和空间之间的这些转换已被确定为沉浸式分析的重大挑战之一 [17]。虽然最近的工作(第 2 节)已经展示了涉及使用 2D 表面和显示器与 MR 结合进行数据可视化的应用,但我们特别关注可视化

行动哲学及其与互动可视化的关系和莫利尔的剧院
这三个学科的第一路比较表明,意图中的挑战和潜力是行动的主题。这既意味着在其跨学科兼容性中显示行动水平的困难,以及不同的参与者(日常生活,用户和戏剧人物中的人)的难度正是因为他们的不兼容是为了确定要求。这又为纪律对象提供了新的启示,并允许在进一步的研究中重新调整示例的各个概况。我们如何识别行动意图?哪些标准使我们能够在语音或可视化中认识到在文本或图像中表达的意图甚至是什么意图?与许多不同学科进口的论文有关,从三个学科的角度来看,一方面,一方面是理论和实践之间的比较,另一方面,文本和图像在另一方面进行比较:与此同时,哲学,可视化和戏剧分析是结合处理的。

面对3D模型可视化的需求迅速变化,中小企业供应链的弹性
摘要 - 中小型机器建设企业(SME)具有发展经济相关部门的巨大潜力。对于在技术的高压下,对于此类企业的可持续发展,值得选择适当的方式来呈现和交换信息,并按照行业4.0的概念使用现代数字服务。对机器建筑中小企业内部和外部可持续发展条件的条件分析确定了限制竞争力增长的主要后勤问题。本文强调了使用有关产品生命周期信息的数字整合的观点:从CAD/CAE/CAM/CAPP设计到水平合作条件下的供应和销售。特别注意确定数字3D模型在不可抗力环境中的作用,这对于中小企业尤其敏锐。该研究基于使用机器建筑产品 - 混合流涡轮机。数字转换工具是Android平台的移动应用程序,它使读取QR码并显示带有数据的3D产品模型成为可能。建议的解决方案可以提高供应链规划的效率,因为不断提供有关产品生命周期每个阶段的信息。关键字:SCM;中小型3d;造型;数据可视化;虚拟模型;生命周期;数字化;管理;行业4.0;可持续性。

使用摄影测量法和运动结构对地面雷达干涉测量的变形图进行配准和可视化
干涉数据与来自地面摄影测量和运动结构 3D 点云。在确定内在和外在方向参数后,将地面雷达干涉测量获得的数据投影到点云上,然后投影到初始照片上。在照片上可视化边坡变形测量值可提供易于理解和分发的信息产品,尤其是对于难以接近的目标区域,例如陡峭的岩壁或岩石坠落区。比较了四种方法的参考步骤和最终可视化的适用性和误差传播:(a) 使用测量相机和立体图像摄影测量的经典方法;(b) 使用测量相机获取的图像,使用运动结构自动处理;(c) 使用数码紧凑型相机获取的图像,使用运动结构处理;(d) 无标记方法,使用数码紧凑型相机获取的图像,使用运动结构,无需人工地面控制点。完全无标记方法可用于高分辨率雷达干涉测量的可视化,有助于生成可供解释的可视化产品。
乔安娜。 A.雪橇-D -hest
“评估事实生产:AI和开源调查的动态”,East-4S,阿姆斯特丹,2024年,“可视化数据阴影捐赠,“制作视觉论文的未来,安特卫普,安特卫普大学,2022年,2022年,2022年的沟通伦理学” Bioethics,” European Association of Centres of Medical Ethics Conference (EACME), Varese, 2022 “Visualising Health Data Ethics,” Knowledge Visualisation Science Lunch, Zurich University of the Arts (ZHdK), Zurich, 2021 “Civic Engagement and the Visual Imperative,” EAST-4S, Online, 2020 “Visualising Ethical Frameworks and Policy Documents in Digital Spaces,” EU Data Visualisation Conference, Luxembourg, 2019年“使用交互式知识图导航健康数据道德”,导航知识景观国际会议,卢布尔雅那,2019年

机器人操作系统(ROS)
▶ Standard architecture in packages (dependencies, versioning, APIs) ▶ Inter-process communication (parameters, topics, services, actions) ▶ Universal description of robots (URDF) ▶ Geometric transformations (TF) ▶ Direct and Inverse Geometry (MoveIt) ▶ Path Planning, Obstacle Avoidance, SLAM (MoveIt, nav2d) ▶ 3D Visualisation, physics simulation (Rviz, Gazebo) ▶数据记录,播放(ROSBAG)

分子生物学和基因工程课程
1.1 Extraction et purification de l'ADN ............................................................................. 49 1.2 Fragmentation ............................................................................................................... 49 1.3 Séparation analytique .................................................................................................... 50 1.4 Visualisation ................................................................................................................. 50 1.5 Quantification ............................................................................................................... 51 1.6 Hybridization and microarrays ............................................................................................... 52 1.7 Amplification (PCR and its applications) ......................................................................................................................................................................................................................................................................................................................................................................................................................................................... ............................................................................................................... 58 Chapter I.sources and preparation of DNA to clone ....................................................... 58