XiaoMi-AI文件搜索系统
World File Search SystemVs
可持续性与移动性
关键讨论点1。重新思考流动性的目的和必要性:学术旅行带来了独特的文化,协作和知识共享的好处,但并非所有旅行都产生同等的影响。学生和早期职业研究人员通常依靠移动性来建立技能和网络,而更多的学者可能会专注于维护现有网络。区分基本旅行与可避免的旅行将是UNA Europa努力的核心。2。虚拟替代方案的作用:虚拟会议和在线合作的最新增加提供了减少旅行的机会而无需牺牲联系。战略采用虚拟选择可以支持学术工作,尤其是在旅行的环境成本超过其利益的情况下。3。通过排放数据有知情的决策:知情的旅行政策需要关于排放的强大,透明的数据。爱丁堡大学的标准化数据方法提供了模型,从而在UNA Europa联盟中实现了集体,数据驱动的努力,以准确评估和管理旅行的环境影响。

人工智能与 COVID-19
医院(美国)于 2019 年 12 月 30 日拉响了第一批警报之一,比新发疾病监测计划 (PMED) 的一位科学家发出警报早了大约 30 分钟(参见 Naudé 2020 中的讨论)。然而,对于进一步跟踪和预测 COVID-19 将如何传播,AI 迄今为止并没有太大用处。这是出于多种原因。首先,AI 需要 COVID-19 数据进行训练。2015 年寨卡病毒就是一个可以做到这一点的例子,其传播是使用动态神经网络事后预测的(Akhtar 等人2019 )。因为 COVID-19 与寨卡病毒或其他感染不同,而且在撰写本文时,仍然没有足够的数据来构建可以跟踪和预测其传播的 AI 模型。到目前为止,越来越多的关于使用 AI 进行诊断和预测的出版物大多倾向于使用小样本、可能有偏见的样本,而且大多是基于中国的样本,而且没有经过同行评审。然而,已经启动了许多有前途的举措来收集和共享数据 - 包括现有数据、新数据以及训练新的 AI 模型。其中包括世界卫生组织 (WHO) 的全球冠状病毒疾病研究数据库,该数据库还提供其他类似举措的链接。其中之一是 GISAID 倡议(以前称为全球共享所有流感数据倡议)的开放获取数据。在其他举措中,或许最雄心勃勃的是语义学者、艾伦人工智能研究所、微软、Facebook 等公司联合发起的一项举措,旨在公开提供
酋长与 E7 的可信度
“凭借经验、表现和测试,您已晋升为首席军士长。在美国海军——而且只有在美国海军——E7 军衔具有独特的责任和特权,您需要履行并必须遵守。您的整个生活方式都发生了变化。对您的期望会更高;对您的要求也会更高。不是因为您是 E7,而是因为您现在是一名首席军士长。”
连续性与不连续性辩论
作为图书馆,NLM提供了对科学文献的访问权限,而无需暗示与其内容的认可或一致。NLM数据库包括来自各种来源的出版物。在本文中,我们通过采用极性“连续性/不连续性”和“稳定/不稳定”来区分一致性和发展的变化。一致性和变化通过组均值连续性/不连续性和个体阶稳定性/不稳定来跟踪。这两种观点在概念上和经验上都是对发展的部分正交观点。发展科学侧重于一致性和随着时间的变化。平均水平的连续性/不连续性以及个人秩序稳定性/不稳定性信息和方法论,可以同时分析。并非所有的发展变化都涉及转化;一致性也起着作用。我们正式化并解释了这两个概念,因为过去许多学者对它们进行了研究。####这是重写文本:我们需要在这里讨论下一个逻辑当代治疗,尤其是在定量方面。一些发育主义者还使用定性变化,例如从手势转变为“不连续”。令人惊讶的是,我们的领域仍然缺乏词汇来区分现在的基本结构,例如连续性和稳定性。我们选择了这两个术语 - 连续性和稳定性 - 分别描述群体平均值和个体差异的一致性。连续特征是随着时间的流逝显示相同平均水平的特征。19–40。为了使读者更容易,我们从一个发展领域(语言)中绘制示例 - 但这些概念适用于个人,二元组和环境的所有领域和特征。将连续性视为一致性,而不连续性是变化,在特征到时间的特征的平均水平中。不连续的,随着时间的流逝,平均水平增加或下降。在两个紧密间隔的时间点之间,儿童词汇可能不会改变,但是在其他可能相同或肯定会在长期儿童中肯定会改变其词汇量的其他人之间的变化。将稳定性视为一致性,而不稳定性是变化,以相对的顺序,地位或群体等级,或者在特征上的特征中。稳定的特征是某些人在一个时间点和以后的时间点显示较高的水平。如果个人不随着时间的流逝保持相对秩序,则会表现出不稳定。随着时间的流逝,孩子们倾向于保持其语言能力的相对顺序。效果大小可以测量数据集中的不连续性,变化或稳定性的幅度。在重复测量分析中,诸如学生配对t检验或f检验之类的平均差异测试用于索引不连续性。效果大小是通过将两个均值之间的差额除以汇总的标准偏差来计算的。效应大小的常用经验法则是科恩的D,其效果将效果分为小(d = 0.20),培养基(d = 0.50)和大(d = 0.80)。Holliday-Brady等,编辑。对于多元F检验,部分ETA方(η2p)提供了效果大小的替代度量。相关性用于索引稳定性。相关的大小通常使用Cohen's R测量,该R将效果分为小(r≈0.10),培养基(r≈0.30)或大(r≈0.50)。尽管它们的重要性,但连续性和稳定性通常与潜在变化模型相混淆。潜在变化模型在单个层面上测量开发的变化,提供有关发展功能的形状(包括截距和斜率)的信息。这些模型可以通知我们有关变量之间的初始位置,变化率和相关性。相比之下,连续性和稳定性仅需要一个单个测量点,从而使数据收集更加灵活。发展科学中的稳定性和连续性分析:理解潜在变化的互补方法。发展科学采用了一系列评估稳定性的方法,包括潜在变化模型。连续性分析在每个时间点都集中在相同的指标上,而稳定性分析不需要此约束。这种区别强调了连续性和稳定分析的互补性质,这些性质具有不同的目标并具有不同的数据需求。值得注意的是,Vineland自适应行为量表的通信结构量表表明,在3至4岁的儿童中,11个月(r = .86)和5至6年11个月(r = .89)的儿童以及18到57个月之间的平均话语(r = .11)和31和46个月(r = .11)和46个月(r = .12)。1995; 16(3):257–275。这种同源稳定性可以提供自由估计,给定共同的来源和方法差异,实践效果和其他因素。相比之下,异型稳定性模拟了在理论上相关的不同明显特征跨个体顺序的维护。例如,3年的口头生产预测了5年的语言理解(13),而在4年以4年的预测命名的命名和对字母系统的熟悉程度为5年(14)(14)。异型稳定性可能会提供保守的估计,这是由于评估测量和过程中使用的程序的差异。研究稳定性的关键挑战在于成分特征随发展而发生巨大变化。例如,20个月的成功沟通可能是通过理解,词汇和词相结合来指示的,而48个月的成功可能涉及口头上的复杂思想,理解单词关系,并以上下文和文化适当的方式进行交流。识别可靠的措施是该领域中的主要方法论问题。使用多种评估工具和跟踪各种变量在衡量儿童语言发展时会导致不一致的结果。潜在变量通过考虑不同的观点和测量方法来提供解决方案,从而在控制潜在偏见的同时提供了更准确的估计。这种方法允许随着时间的推移测量的变化,同时保持评估稳定性所需的可比性。引用了以下参考文献以支持这项工作:Hartmann等。19–40。稳定性通常被认为是个体内部的一致性,但也可以归因于支持特征稳定性的内源性因素或环境影响。补充稳定性的同型和异型模型是介导的稳定性,它描述了第三个变量如何影响两个特征之间的稳定性。例如,母亲的反应能力可以介导前语言手势和后来的残疾儿童语言发展之间的稳定性。通过考虑潜在的介体,研究人员可以确定随着时间的推移保持稳定性的基本机制。发展科学旨在描述,解释,预测和优化发展轨迹,涉及在整个寿命中追踪变化和连续性。随着时间的流逝,稳定性和转变的动态会显着影响个人和群体的经验和解释。具有独特特征的人,无论是一致还是改变,都以独特的方式与环境互动,塑造他们的未来发展。令人回味的互动的概念表明,一致的特征可以从社会和身体环境中引起特定的反应,从而影响以后的结果。例如,由于周围的人进行的调整以匹配他们稳定的语音模式,因此声音或非声音的婴儿以及健谈或默许的幼儿的童年经历不同。一致性和变化之间的相互作用是发展科学理论的基本方面。扫盲基础:幼儿对阅读发展的影响。理论家经常争论某些特征是稳定的特征还是瞬态状态,许多育儿和家庭功能理论依赖不变特征来支持更直接的发展模型。例如,亲子互动中的一致性有助于形成内部工作模型和基础依恋理论。相反,变化也是开发系统的关键特征,随着时间性嵌入了发育系统理论中,这意味着持续的转化。变化对于在进化论和发展理论中的适应性(例如弗洛伊德,埃里克森和伯爵提出的理论)中至关重要。发展变化可以是系统的,并且与年龄有关,规范性和历史相关,随机和非规范或与生命有关。发展理论跟踪了各个方面的这些变化,包括个体发生时间,家庭时间和历史时间。一致性和变化对测量具有重要意义,因为稳定的特征在心理上具有更大的意义,并且可以预测未来的结果。本质上,一致性和变化都是定义和理解发展过程的核心。发展科学的一致性是指特征随着时间的推移保持稳定或不变的程度。它通常与变化形成鲜明对比,但是研究表明一致性既不是绝对也不是静态的。相反,它存在于连续体中,并由各种因素(例如个体差异,年龄和环境环境)主持。Malden:Blackwell Publishing; 2002。pp。个体变化在塑造一致性方面起着重要作用,有些人比其他人更加一致。样本的发育阶段或年龄也会影响稳定性,而年龄较大的孩子通常比年轻的孩子表现出更大的一致性。此外,用于评估特征的方法可能会影响稳定性估计,并在不同时间应用的措施产生不同的结果。评估的持续时间和上下文也很重要,因为较短的间隔可能无法捕获变化或一致性的全部程度。此外,评估中使用的设置和参数可能会影响连续性和稳定性,并具有一致的设置,促进稳定性和不一致的设置会减弱它。一致性是依赖理论的,其存在或不存在可能受社会经济地位,环境条件和个人气质等因素的影响。总而言之,了解一致性和变化对于获得发展动态的全面图景至关重要,强调了在每种情况下考虑节制和上下文因素的必要性。儿童之间的相对发展位置可能会随着小组内部的差异而随着时间的流逝而变化,这对于科学家在跟踪进度时必须同时考虑连续性和稳定性至关重要。虽然孩子可能与以前保持同一水平,但如果小组中的其他人提前或回归,他们的相对位置仍然可能不稳定。这重点介绍了评估个人发展时对同伴变化的重要性。[Google Scholar] 11.Smith CE,Lerner MD。此外,区分对发展的时间方面的真正敏感性和未能捕获连续和稳定的品质的敏感性可能具有挑战性。在更长的时间内,将变化归因于测量错误,不同的上下文,实际发展,实践,熟悉度或交互式过程变得越来越复杂。连续性和不稳定性都可以预测与零没有显着的平均差异或相关性无明显的相关性,从而使它们在方法论和统计上有问题。此外,一致性和变化的概念本质上是模棱两可的,一致性可能表明韧性或不灵活性,并且变化表示灵活性或混乱。缺乏语言是某些自闭症谱系障碍(ASD)的标记,而语言丧失是痴呆症的指标。在人类发展中,一致的特征和变化的特征都是有意义的,反映了整个生长和适应的动态性质。优化发展科学项目的目标涉及调解该领域的两个基本动态,这既发人深省又具有挑战性。这一和解得到了NIH的NICHD的壁内研究计划的支持,所有作者都批准了最终的手稿提交。的“发展研究中的设计,测量和分析”(2015年),Kagan的“婴儿的变化和连续性”(1971),Lerner等。的“母亲和儿童语言中的名词和动词产生:跨越第二年的连续性,稳定性和预测”(2016年),Bornstein等。2.Fraley RC。的“人类发展的概念和理论”(2015年),麦考尔的“婴儿期智力功能的发展以及后来的智商的预测”(1979年),沃尔维尔的《行为发展研究》(1973年),Longobardi等,Longobardi等。在生物和社会风险中儿童生命的前十年中核心语言技能的稳定性(在印刷中),科恩的“行为科学的统计能力分析”(1988年)(1988年),伯恩斯坦的“人类婴儿……和其余的生命周期”(2014年)(2014年),Sparrow等。的“ Vineland自适应行为量表调查表格手册(访谈版)”(1984),Blake等。的“评估自发语音样本中语法复杂性的定量度量”(1993),加文和吉尔斯的“样本量对学龄前儿童语言样本测量的时间可靠性的影响”(1996),以及Beals等。的“谈论和倾听,支持低收入家庭的儿童的早期扫盲发展。”产妇反应能力与学龄前儿童的语言发展之间的关系。应用发育心理学杂志。doi:10.1006/jadp.1995.0036。[doi] [Google Scholar] 12.Hart B,Risley TR。在美国年轻儿童的日常经历中存在有意义的差异。纽约:Paul H Brookes Publishing; 1995。pp。[Google Scholar] 13.Lerner MD,Smith CE。幼儿园识字成就的早期育儿和学龄前预测指标。儿童发展。1999; 70(2):342–354。 doi:10.1111/0003-0340.E00363。 3. Bronfenbrenner U&Morris PA。 4.Ayer L&Bornstein MH。 5.Bornstein MH。1999; 70(2):342–354。doi:10.1111/0003-0340.E00363。3. Bronfenbrenner U&Morris PA。 4.Ayer L&Bornstein MH。 5.Bornstein MH。3. Bronfenbrenner U&Morris PA。4.Ayer L&Bornstein MH。5.Bornstein MH。[doi] 1.Bowlby J.依恋理论是一种心理模型,探讨了人类如何与他人(尤其是看护者)建立密切联系。通过荟萃分析和动态建模研究了从婴儿期到成年的依恋关系的稳定性。人类发展的生物生物学模型提出,人类发展是由多个环境造成的。阶段理论描述了在不同生活阶段的人类发展的发展。发展心理学的重点是了解人类从出生到老年的认知,社会和情感上如何发展。整个生命周期和个人之间的发展变化可能是定量的或定性的。人类发展的变化可以描述为定性或定量,一些理论提出了预定的表观遗传学方法。这个概念通常与埃里克森的工作和关键时期假设有关。这里的关键点是,对发展变化的不同描述和解释涉及三个维度的各种位置:描述性连续性 - 透视,解释性的连续性 - 透视性和定量质量质量维度。可以通过各种方式将描述性和解释性方法组合在一起,例如描述性定性连续性具有解释性的定量不连续性,反之亦然。例如,随着时间的推移,诸如情绪之类的人格特质可能在质量上保持相同,但表现出定量变化(例如,微笑频率)。这种现象可以通过连续或不连续的原则来解释。解释的选择取决于正在研究的发展的特定领域和一个人的发展理论。最终,涉及人类生活的耦合将取决于实质领域和一个人的基本发展理论。变化的概念深深植根于对发展的特定理论观点,这表明将人们的观点限制在特定变量或过程中可能会阻碍对发展过程中发生的复杂变化的理解。相反,理论在塑造我们对发展中的连续性或不连续性的看法中起着至关重要的作用。Heinz Werner强调了考虑变化的定量和定性方面的重要性,并承认对这两个维度的全面理解对于掌握发展过程至关重要。定量变化涉及发展变量或过程的数量,频率,幅度或幅度的变化。例如,考虑一个人的体重在不同年龄段测量:显着的变化发生在12到13年之间,从125磅增加到150磅。但是,这种变化也可以是逐渐的,即单个每年增加5磅,尽管偶尔会出现差距,导致不断变化。相比之下,定性变化着重于开发过程中新品质或特征的出现。这包括表观遗传,其中涉及区分现有和新获得的特征。通过承认变化的定量和定性方面,研究人员可以对发展过程有更细微的理解。Werner的变化概念突出了有机体发展的本质。发展涉及新兴的变化,这些变化带来了质性上的新事物,与以前存在的不同。例如,从橙子集合到拥有摩托车是这样更改的一个例子 - 不能将其简化为先前的状态。同样,青春期引入了新的驱动器,性欲,该驱动器是一个独立的实体,不能完全归因于诸如饥饿和口渴之类的现有驱动器。这种出现代表了定性的不连续性,在这里出现了新的质量,而不会降低其前辈。此外,紧急变化表现出熟悉感 - 缺乏中间阶段,这表明早期和后期状态之间的连续性。正如Werner所指出的那样,两个关键特征定义了定性变化:出现(以前的状态不可减至)和粘度(缺乏中间步骤)。相比之下,单独的特征可以描述定量不连续性,现在它被更好地称为突然性,以避免与定性不连续性混淆。Werner的工作的关键要点是,他帮助阐明了发育变化中连续性透视的概念,使我们能够区分不同类型的连续性,例如定量和定性的连续性。
锂离子电池与 VRLA 电池
关于附加和高级功能,UPS 逻辑可以执行电池校准和电池测试,以监控和控制电池状况。此外,还可以检索有关电池状态和预期可用自主时间的可靠信息,以及预测诊断、电池使用记录以及普通和特殊维护通知。通过适当的信息和数据来设置 UPS 逻辑,上述高级功能适用于所有 VRLA 品牌和型号。
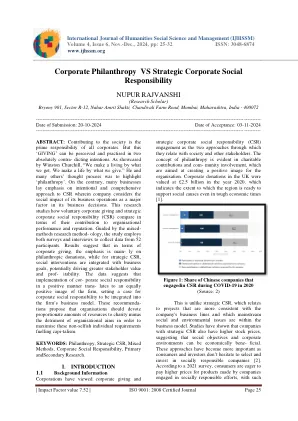
企业慈善事业 VS 战略......
1.3 研究的主要目的 本研究的主要目的是对企业慈善行为和战略性 CSR 在有效性和对组织绩效的影响方面进行比较,进行批判性分析。 1.4 研究目标 研究企业慈善行为如何影响利益相关者的看法以及组织的声誉和商誉。 评估战略性 CSR 举措在实现社会和商业目标方面的有效性。 研究与传统慈善活动相比,战略性 CSR 的融入如何影响企业财务绩效。 1.5 研究问题 企业慈善行为如何影响利益相关者的看法和组织声誉? 战略性 CSR 举措以何种方式有助于实现社会和商业目标? 与传统慈善活动相比,战略性 CSR 融入商业实践如何影响企业财务绩效? 1.6 研究意义 本研究的贡献远远超出了概念研究。它对学术界和商业界都有实际意义。对于学术界来说,这项研究

化疗:- 误解与事实
研究人员对化疗与其他疗法的联合疗法进行了研究,发现当患者接受化疗时,化疗能够靶向并摧毁手术或放疗无法切除的癌细胞。这种新治疗方法被称为“联合化疗”,并被证明可以降低复发率。


AI 产品组合与 Supermicro 对比
服务器是支持 AI 工作负载的基础计算基础设施,它可以根据工作负载的大小或类型使用 CPU、GPU 或两者作为计算资源。对于 HPC 或 AI 等更大或要求更高的工作负载,GPU 可提供最佳性能。GPU 具有多种外形尺寸,包括通用 PCIe、开放计算项目加速器模块 (OAM) 和专有的 NVIDIA SXM 架构,后者目前可提供最佳性能。1 大内存容量和服务器设计功能(例如冷却架构和功率效率)也会影响性能。大多数数据中心仍使用空气冷却,这意味着 AI 工作负载需要尽可能有效地用空气冷却的服务器。下面,我们将重点介绍 Dell PowerEdge 服务器产品的组件、冷却选项等,以及它们发布的 MLCommons ® MLPerf ® 分数。