XiaoMi-AI文件搜索系统
World File Search SystemWAM

2024 年西澳医学博览会
• 先进的电弧焊技术,包括双弧和串联工艺 • 激光束和混合焊接技术及应用 • 送丝或粉末电子束焊接 • 药芯焊丝和无缝药芯焊丝技术及其用途 • 全金属合金焊接及其焊缝测试和分析 • 工业应用、检查和测试 • 增材制造部件的表面改性 • 高强度和装甲钢焊缝及其性能(包括弹道性能) • 水下和湿焊技术及其耗材 • 金属增材制造 (MAM) 材料的设计和模拟方面 • MAM 材料的测试、MAM 部件的变形预防和残余应力 • MAM 和双金属 WAAM 部件的疲劳和断裂韧性方面 • 机器人 MAM 和 WAAM 应用中的编程和软件开发 • 增材制造的预测理论和计算方法 • MAM 和 WAAM 部件的测试、无损检测方法和缺陷评估 • 焊接和 MAM 和 WAAM 人员的教育-培训-认证发展
WAM Arm – 用户手册 - Barrett 支持
1 系统描述 1.1 标准 WAM * 系统组件 1.1.1 系统功能 感谢您选择全臂机械手 (WAM)。WAM 旨在克服传统机械臂缺乏反向驱动能力的问题,同时保持耐用性、低功耗、轻移动重量和易用性。标准 WAM 是四自由度 (4- DOF) 臂。可选 WAM 腕部增加了三个自由度 - 请参阅第 1.2.1 节。WAM 灵活纤细,可轻松绕过路径上的障碍物,并具有流畅而精确的关节运动,这有助于 WAM 在机器人控制研究和新兴应用中的普及。紧凑、系统重量轻和极低功耗使 WAM 臂具有独特的便携性,因此是移动平台的理想选择。其重量轻且没有控制器柜,因此比同等尺寸的机械臂更容易安装。 WAM 还可以直接由移动平台上的小型电池供电,无需电源调节,电池可承受各种电压。虽然没有机械臂被认为是“安全的”,并且应根据每个应用的需求采取所有预防措施,但 WAM 的反向驱动能力和多层安全系统使其成为最安全的机械臂之一。由于其 95% 的反向驱动电缆驱动器(与反向驱动能力较差的齿轮和谐波驱动器相反),WAM 在接触墙壁和人时可以自然而轻柔地做出反应。这些属性使 WAM 成为手术和康复领域首批机械臂之一。我们希望您喜欢 WAM 的多功能性和实用性。请随时提供反馈并在需要时寻求建议。美国 +617-252-9000,support@barrett.com ,或 http://www.barrett.com/。 1.1.2 文档 WAM 附带六个独立的文档: 1. 用户手册(本手册) 2. 快速入门指南 3. WAM 电缆维护指南 4. 腕电缆维护指南 5. 惯性规格手册 6. 支持参考表 1. 用户手册(本手册)涵盖: • 系统组件和选项 • 安全说明 • 系统设置和操作 • 故障排除 • 技术规格 • 常见问题 2. 快速入门指南是一份单页指南,涵盖操作 WAM 的基本知识以及 WAM 的一些基本演示。其中包括打开和初始化 WAM、原点位置、故障恢复以及重力补偿和教学和播放演示。 *“Whole Arm Manipulator”和“WAM”是 Barrett Technology® Inc. 的商标。
Microsoft Word - 通用 WAM 监视安全评估 v5-0 _RD 更改…
图 19:功能模型以及 WAM 和 SSR....................................................................................137 图 20:WAM 和 PSR 的功能模型...................................................................................138 图 21:故障树示例........................................................................................................159 图 22:危险 H01-U1(未检测到 1 架飞机的 2D 位置丢失)....................................................161 图 23:危险 H01-Dmany(检测到多架飞机的 2D 位置丢失)。航路情况(无冗余).........................................................................................163 图 24:危险 H01-Dmany(检测到多架飞机的 2D 位置丢失)。TMA 情况(无冗余).........................................................................................................164 图 25:危险 H01-Dmany(检测到多架飞机的 2D 位置丢失)。航路情况。经过冗余修订................................................................................................................167 图 26:危险 H01-Dmany(检测到多架飞机的 2D 位置丢失)。TMA 案例。经过冗余修订。......................................................................................................168 图 27:TMA 中的危险 H02-U1(未检测到一架飞机的错误 2D 位置显示).............................................................

野生动物意识手册
最初的《野生动物意识手册》(WAM)是由英国外交和联邦事务部极地地区司发起的。WAM 的设计首先是为了帮助直升机飞行员,因为这些操作极有可能对野生动物造成干扰。在南极洲,直升机的飞行高度通常比固定翼飞机低,而且在着陆地点方面也具有更大的灵活性,这增加了它们与野生动物互动的可能性。因此,该手册以英国皇家空军日常使用的直升机着陆点手册(AIDU 2003)为蓝本,尽管该手册不是围绕野生动物意识设计的。然而,带有适当大小和比例的地图的挂图概念已被证明可用于飞行中,因此被改编为 WAM。此外,在调整 WAM 设计时,还咨询了来自皇家海军航空兵第 815 中队第 212 飞行队、在 HMS Endurance 号上飞行并在南极洲拥有丰富实际飞行经验的飞行员。
野生动物意识手册
最初的《野生动物意识手册》(WAM)是由英国外交和联邦事务部极地地区部发起的一项倡议。WAM 的设计首先是为了帮助直升机飞行员,因为这些行动极有可能对野生动物造成干扰。在南极洲,直升机的飞行高度通常比固定翼飞机低,而且在着陆地点方面也具有更大的灵活性,这增加了它们与野生动物互动的可能性。因此,该手册以英国皇家空军日常使用的直升机着陆点手册(AIDU 2003)为蓝本,尽管该手册的设计并非围绕野生动物意识。然而,带有适当大小和比例的地图的挂图概念已被证明可用于飞行,因此被改编为 WAM。此外,在改编 WAM 设计时,还咨询了来自皇家海军航空中队 212 飞行队、在 HMS Endurance 上飞行并在南极洲拥有丰富实际飞行经验的飞行员。
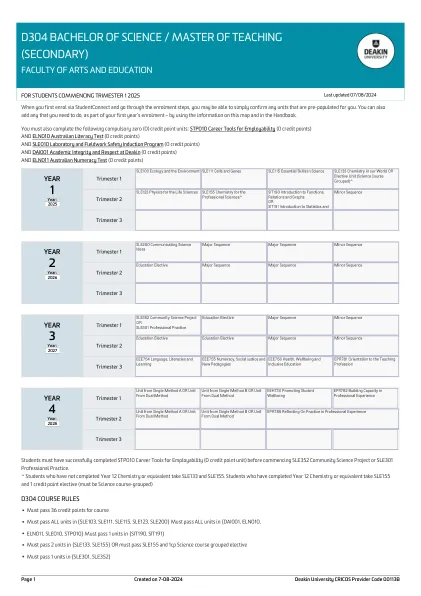
D304 2025 T1 Coursemap
在课程的前三个本科级别成功完成后,具有加权平均分数(WAM)的学生超过60个课程的研究生水平。学生不能在本科水平完成所有24个学分的情况下进入研究生的学习水平。少于60的WAM导致D304的替代退出,并获得了S320理学学士学位。
军事空中交通管制 (MATC) - Indra
多点定位和广域多点定位 (MLAT / WAM) Indra MLAT/WAM 是一种高精度解决方案,适用于跑道监控期间的空中监视和地面监视。该系统由一系列分布式站点组成,这些站点收集从飞机接收到的 SIF / SSR 信号的到达时间差,以确定其 3D 位置。Indra MLAT 传感器是市场上最精确的传感器,同步精度优于 1ns。此外,站点的分布可在地形限制雷达覆盖的区域提供监视,并且是一种可扩展的解决方案,可实现灵活高效的升级。

赞助/冠名咨询服务协议
展览场所 2022-2026 战略计划的目标是增强品牌形象和推广,并在展览场所及其所有业务中保持积极的运营财务业绩,作为支持这一目标的战略,我们将在现有运营中寻找新的或扩大的收入机会,并确保满足运营预算或显示预算盈余。2003 年,多伦多市采购部发布了一份 RFP,要求为国家贸易中心和董事会提供独家赞助服务,收到了七份提案,经过评估,董事会在 2003 年 7 月 25 日的会议上建议并批准了与 WAM 签订三年协议的建议。与 WAM 的协议于 2006 年 7 月 31 日到期,董事会和 WAM 之间达成了一项新协议,仅涉及为拟议的会议中心寻找冠名赞助商。该协议于 2007 年 12 月 31 日到期。在 2006 年 6 月的会议上,董事会批准与 WAM 达成进一步协议,自 2006 年 8 月 1 日起至 2007 年 1 月 31 日到期,为期六个月,为 Direct Energy Centre and Exhibition Place 提供赞助咨询服务。在 2008 年 5 月 2 日的会议上,董事会批准与 Allstream 达成协议,以 10 年的期限命名翻新的汽车大楼,该协议随后在 2008 年 6 月 23 日的会议上获得市议会的批准。命名协议期限为 2008 年 8 月 1 日至 2018 年 7 月 31 日。http://app.toronto.ca/tmmis/viewAgendaItemHistory.do?item=2008.EX21.31 在 2015 年 9 月 6 日的会议上,董事会批准了对 Allstream 协议的修订,该修订随后在 2013 年 11 月 13、14、15、16、17 和 18 日的会议上获得市议会的批准。http://app.toronto.ca/tmmis/viewAgendaItemHistory.do?item=2013.EX35.20
可持续和聪明的移动策略和...
(7)关于一般方法和方法,以更具体的术语制定政策和措施(“ PAMS”),并具有详细的描述,具有精确的动作和清晰的里程碑,尤其是在解决可再生能源,能源效率和内部能源市场的维度中。以更明确的方式描述每个PAM对相应的2030目标或其他政策目标实现的定量贡献,例如增加每个单个PAM的温室气体(“ GHG”)排放的预期贡献。澄清显示“ Wem/WAM”的每个PAM,以现有措施(“ WEM”)(“ WEM”)和其他措施(“ WAM”)的一部分成为两种情况的一部分。更正PAM的编号,该编号在PAM No.16,在“ PAM 11:太阳能地区供暖”中。