XiaoMi-AI文件搜索系统
World File Search SystemWDT

采用固件集成技术 Rev.3.10 的 RX 系列 WDT 模块
ROM(代码和常量)和 RAM(全局数据)的大小由 2.8 配置概述中所述的构建时配置选项决定。该表列出了当 C 编译器的编译选项设置为其默认值时的参考值,如 2.4 支持的工具链中所述。编译选项的默认值为优化级别:2、优化类型:for size 和数据字节序:little-endian。代码大小因 C 编译器版本和编译选项而异。

VK0192 数据手册
时序基准发生器是一个 8 级递增计数器 , 可以精确的产生时基。看门狗 ( WDT )是由一个 时基发生器和一个 2 级计数器组成,它可以在主控制器 或其它子系统处于异常状态时产生中断。 WDT 计数溢出时产生一个溢出标 志,此标志可以通过命令输出到 /IRQ 脚 ( 开漏输出 ) 。时序基准发生器和 WDT 时钟的来源。时基和看门狗共用 1 个时钟源,可配置 8 种频率: f WDT = f sys/2 n ( n=0~7 )
活动计划 - 陆军财务管理和主计长
财务管理社区是竞选计划的最高优先事项。随着我们继续加强和强化劳动力发展与培训 (WDT),我们将使用财务与审计 (FC) Connect 改善专业发展资源和机会的沟通范围。这个学习管理网站将员工与直接支持我们专业人员的讲师指导和自定进度的财务培训联系起来。沟通一直是提高认识和可访问性的关键因素,WDT 领导层将继续强化这一目标,确保财务管理劳动力(包括文职和军人)了解专业发展机会和职业道路。我们还将与财务和审计学校合作,以便财务管理士兵得到培训、教育和适当装备,以便在任何环境下为行动提供资源和维持行动,同时确保财务管理专业适应和发展以保持任务相关性。

dsPIC30F 数字信号控制器 - Microchip Technology
• DSP 功能 • 强大的 MCU 内核 • CAN 和 OSEK 库 • 18 至 80 引脚产品 • 一个或两个 CAN 2.0B 模块 • 支持较长的产品生命周期 • 为众多应用提供广泛的产品选择 • 扩展的温度操作 • V DD 范围为 +2.5 至 5.5V DC • 通过 UART 和软件支持 LIN • 安全模式操作功能:LVD、BOR、WDT、软件陷阱 • 高可靠性闪存,典型耐擦写次数为一百万次,数据保留时间 >40 年
东盾» 第一部分 08/11/2020 12:00 - IVAO
414018N1313021E 到区域 1 或 2(地图上标记为虚线)。进入 ZKP100 后下降到 3000/4000 英尺。飞行高度将由组织者在 HQ-SOD 网站注册后确定。使用扩展方块技术在该区域进行搜索。每次观察到潜艇都应向 HQ-SOD Discord 服务器的中继机组报告,并指定位置坐标。(搜索区域 1 - 中继飞机在区域 3;搜索区域 2 - 中继飞机在区域 4)。搜索完成后返回 415400N1311300E,然后通过 WDT VOR/DME 108.2 返回符拉迪沃斯托克 (UHWW)。

PFC 的数字电源控制 - 瑞萨
io_set_cpg :执行 PLL 初始化 WDT.WRITE.WTCSR = 0xa51e; => WDT 停止,WDT 计数时钟设置 => 1/4096 x P 时钟(50MHz;20.97 毫秒) WDT.WRITE.WTCNT = 0x5a85; => 计数器初始设置 10 毫秒 CPG.FRQCR.WORD = 0x0303; => Clockin = 12.5MHz => I 时钟 = 200MHz,B 时钟 = 50MHz => P 时钟 = 50MHz CPG.MCLKCR.BIT.MSDIVS = 1; => MTU2S = 100MHz CPG.ACLKCR.BIT.ASDIVS = 3; => AD = 50MHz STB.CR3.BYTE = 0x02; => 模块待机清除 => HIZ、MTU2S、MTU2、POE2、IIC3、ADC0、保留(1)、FLASH STB.CR4.BYTE = 0xE2; => 模块待机清除 => SCIF3、保留(0)、CMT、保留(1)、EtherC STB.CR5.BYTE = 0x12; => 模块待机清除 => SCI0、SCI1、SCI2、SCI4、ADC1 pfc_init:执行 MTU2 初始化 ADC0.ADCR.BIT.ADCS = 0x0; => AD0 初始化 ADC0.ADANSR.BIT.ANS0 = 0x1; ADC0.ADANSR.BIT.ANS1 = 0x1; ADC0.ADANSR.BIT.ANS2 = 0x1; ADC0.ADANSR.BIT.ANS3 = 0x1; ADC0.ADBYPSCR.BIT.SH = 0x1; ADC1.ADCR.BIT.ADCS = 0x0; => AD1 初始化 ADC1.ADANSR.BIT.ANS0 = 0x1; ADC1.ADANSR.BIT.ANS1 = 0x1; ADC1.ADANSR.BIT.ANS2 = 0x1; ADC1.ADANSR.BIT.ANS3 = 0x1; MTU2S.TSTR.BYTE = 0x0; => 清除 MTU2S 计数器 MTU2S3.TCR.BIT.TPSC = 0x0; => MTU2S3 TCNT 清除禁用 MTU2S3.TCR.BIT.CKEG = 0x0; => MTU2S3 在上升沿计数 MTU2S4.TCR.BIT.TPSC = 0x0; => MTU2S4 TCNT 清除禁用 MTU2S4.TCR.BIT.CKEG = 0x0; => MTU2S4 在上升沿计数 MTU2S.TDDR = 1; => MTU2S 死区时间 MTU2S3.TGRB = 495; MTU2S3.TGRD = 495; MTU2S4.TGRA = 300; => PFC 输出 MTU2S4.TGRC = 300; => PFC 输出 MTU2S4.TGRB = 200; => PFC 输出 MTU2S4.TGRD = 200; => PFC 输出 MTU2S.TCDR = 500; => 三角波形设置 100K MTU2S.TCBR = 500; => 三角波形设置 100K MTU2S3.TGRA = 501; => 三角波形设置 100K MTU2S3.TGRC = 501; => 三角波形设置 100K MTU2S.TOCR1.BIT.PSYE = 0x1; => 切换输出 MTU2S.TOCR1.BIT.TOCS = 0x1; MTU2S.TOCR2.BIT.OLS3N = 0x0; => TIOC4D MTU2S.TOCR2.BIT.OLS3P = 0x1; => TIOC4B MTU2S.TOCR2.BIT.OLS2N = 0x1; => TIOC4C MTU2S.TOCR2.BIT.OLS2P = 0x0; => TIOC4A MTU2S.TOCR2.BIT.OLS1N = 0x0; => TIOC3D MTU2S.TOCR2.BIT.OLS1P = 0x1; => TIOC3B MTU2S3.TMDR.BIT.MD = 0xF; => 峰值时输出高电平 MTU2S.TOER.BIT.OE3B = 0x1; => TIOC3B 引脚输出 MTU2S.TOER.BIT.OE3D = 0x1; => TIOC3D 引脚输出
东盾» 第一部分 08/11/2020 12:00 - IVAO
海上巡逻机 类型:中型飞机(Il-38;P-8 Poseidon;Lockheed P-3 Orion 等)起降时刻:12 出发机场:符拉迪沃斯托克(UHWW) 出发时间:按起降时刻 任务:前往 FL100 和 FL180 之间的 ZKP-100,通过 414018N1313021E 进入区域 1 号或 2 号(地图上标记为虚线)。进入 ZKP100 后下降至 3000/4000 英尺。飞行高度将由组织者在 HQ-SOD 网站注册后确定。使用扩展方块技术在该区域执行搜索。每次观察潜艇时,应向 HQ-SOD Discord 服务器的中继机组报告,并指定位置坐标。(搜索区域 1 - 中继飞机在区域 3;搜索区域 2 - 中继飞机在区域 4)。搜索完成后返回 415400N1311300E,然后通过 WDT VOR/DME 108.2 返回符拉迪沃斯托克 (UHWW)。

现代网络防御中的异常行为检测...
表 1 相关主要出版物的研究目标章节和研究问题的映射 ...................................................................................................................................... 20 表 2 主要研究按类型分布。期刊——J 或会议——C 和出版年份。. 62 表 3 主要研究的关键词分析。...................................................................................................... 63 表 4 重点关注网络弹性方面(按设计)的主要研究。............................................................. 70 表 5 按参考模型层对主要研究进行分类。............................................................................. 73 表 6 按对手威胁类型对主要研究进行分类 ............................................................................................. 76 表 7 DFIR 关键阶段对主要研究进行分类。 ................................................................ 77 表 8 算法 1:SPEAR 框架特征提取算法 .......................................................................... 108 表 9 算法 2:SPEAR 框架数据清洗与特征约简 ................................................................ 109 表 10 算法 3:SPEAR 框架的特征工程 ...................................................................... 110 表 11 KPSS 测试输出平稳性测试 – 正态数据集 ...................................................................... 111 表 12 算法 4:监督学习集成超级学习器
扩大规模并跨越界限:加州的能源存储
缩写和术语 CAISO 加州独立系统运营商 CCA 社区选择聚合 CEC 加州能源委员会 CPUC 加州公共事业委员会 DER 分布式能源资源 ELCC 有效负荷承载能力 ESP 电力服务提供商 GHG 温室气体 GW 千兆瓦 GWh 千兆瓦时 HFTD 高火灾威胁区(威胁从最小到最大:非 HFTD、第 1 级、第 2 级、第 3 级) IOU 投资者所有的公用事业(非正式,公用事业) kW 千瓦 kWh 千瓦时 LMP 位置边际价格 LSE 负荷服务实体(包括 IOU、CCA、ESP) MW 兆瓦 MWh 兆瓦时 NQC 净合格容量 PG&E 太平洋煤气电力公司 RA 资源充足性 RCAM 红木海岸机场微电网 RPS 可再生能源组合标准 SCE 南加州爱迪生公司 SDG&E 圣地亚哥天然气电力公司SGIP 自发电激励计划 SOC 充电状态 subLAP CAISO 定义的子负载聚合点 VPP 虚拟发电厂 WDAT/WDT 批发配电接入电价/批发配电电价
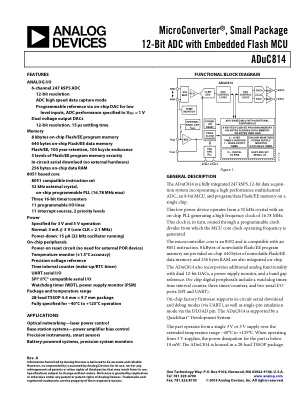
ADuC814 MicroConverter,小型封装 12 位 ADC,带嵌入式闪存 MCU 数据表 (REV. A)
模拟 I/O 6 通道 247 kSPS ADC 12 位分辨率 ADC 高速数据捕获模式 通过片上 DAC 可编程参考低电平输入,ADC 性能指定为 V REF = 1 V 双电压输出 DAC 12 位分辨率,15 µs 稳定时间 存储器 8 kbytes 片上 Flash/EE 程序存储器 640 byte 片上 Flash/EE 数据存储器 Flash/EE,100 年保留,100 kcycle 耐久性 3 级 Flash/EE 程序存储器安全性 在线串行下载(无需外部硬件) 256 byte 片上数据 RAM 基于 8051 的内核 8051 兼容指令集 32 kHz 外部晶振,片上可编程 PLL(最大 16.78 MHz) 三个 16 位定时器/计数器 11 条可编程 I/O 线 11 个中断源,2 个优先级 电源 指定用于 3 V 和 5 V 操作 正常:3 mA @ 3 V(内核 CLK = 2.1 MHz) 断电:15 µA(32 kHz 振荡器运行) 片上外设 上电复位电路(无需外部 POR 器件) 温度监视器(精度为 ±1.5°C) 精密电压参考 时间间隔计数器(唤醒/RTC 定时器) UART 串行 I/O SPI ® /I 2 C® 兼容串行 I/O 看门狗定时器 (WDT)、电源监视器 (PSM) 封装和温度范围 28 引脚 TSSOP 4.4 mm × 9.7 mm 封装 完全额定工作温度范围为 −40°C 至 +125°C 应用