XiaoMi-AI文件搜索系统
World File Search SystemWaymo
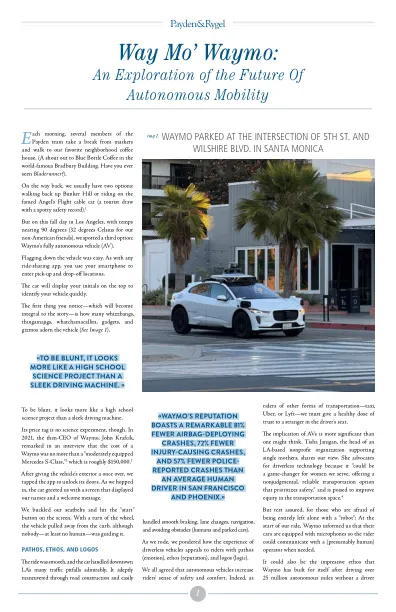
Way Mo'Waymo:
,Payden&Rygel拥有1640亿美元的管理,是最大的私人投资顾问之一,专注于积极管理固定收益和股票组合。Payden&Rygel为包括中央银行,养老基金,保险公司,私人银行和基金会在内的全球投资者提供了全方位的投资策略和解决方案。独立和私人拥有的佩登总部位于洛杉矶,并在波士顿,伦敦和米兰设有办事处。
Waymo LLC评论RIN 0694 – AJ56
4 ANPRM打算将CV定义为一种汽车车辆,该汽车将网络上的硬件集成到汽车软件系统上,以通过专用的短距离通信,蜂窝电信连接,卫星通信或其他无线频谱连接与任何其他网络或任何网络或设备。这样的定义很可能包括具有全球导航卫星系统(GNSS)通信进行地理位置的汽车汽车,无论是个人还是商业;与智能运输系统的通信;远程访问或控制;无线软件或固件更新;或设备的路边援助。CVS还整合了可以在车辆,网络,应用程序和车辆外部使用车辆内部连接和/或外部连接的硬件。” 89 FR 15068(2024)

比较Waymo仅限骑手碰撞数据与710万英里的人类基准
本文描述了撞车事故是由于安全性确定生命周期的一部分,仅骑手(RO)广告乘车服务的现场部署。现场崩溃结果可能是确认设计元素和预测的重要因素,如图1所示(Favarò等人。,2023a)。在开发系统和开始RO操作之前或考虑对现有RO部署的更新之前,只有预测预期性能的前瞻性方法。在一种前瞻性方法中,例如在模拟部署中(Webb等人,2020)或如Favarò等人所述。(2023b),模拟用于预测AD崩溃率,并将该速率与基准进行比较。在这种方法中,可以为基于崩溃严重性模型确定的不同严重程度设置基准,因为模拟无法获得诸如伤害之类的结果。基于本文介绍的崩溃结果的回顾性分析可用于补充和/或确认广告准备确定中使用的这些前瞻性方法(Webb等人。,2020)。

Imagen 3 -Googleapis.com
运动预测是指根据历史轨迹和高清图来估算代理商的未来轨迹,是自主驾驶领域的一项基本任务。近年来,运动预测引起了广泛的关注[4、5、7、9、11、17],因为对于机器人车辆进行安全决定至关重要。在现有研究中,MTR [8,13 - 15]系列取得了显着的成功。他们采用编码网络进行场景上下文编码,并与解码器网络配对,该网络从一组意图查询中生成多模式轨迹,这些查询是从预定义的锚定初始化的。我们的解决方案MTR V3是MTR ++ [14]的扩展,这是一个尖端的运动预测框架,并通过将原始LIDAR数据掺入场景编码和意图查询在轨迹解码中的演变而得到改进。具体来说,我们引入了激光雷达编码器,以捕获基本场景上下文信息,例如植被和建筑物,这些信息通常在高清地图中缺少,但对于预测行人运动至关重要。此外,由于锚的稀疏性,香草MTR ++遭受了高回归误差。为了减轻此问题,我们在[8]中采用了不断发展且独特的方案,以根据特定场景适应锚定。利用这些技术,我们的解决方案达到了
Waymo建议信的处置0002
高管摘要南加州天然气公司(SoCalgas)天然气系统将提供夏季,并提供足够的供应来满足夏季峰值需求。管道和存储容量合并可以提供每天37.25亿立方英尺(MMCFD)的天然气,这足以满足去年夏天的高峰需求日为3,175 MMCFD。尽管可以在不使用Aliso Canyon天然气存储设施(Aliso Canyon)的情况下满足每日需求,但是在这一天,所有四个存储设施都可以使用,包括Aliso Canyon,以帮助满足小时需求。SOCALGAS系统目前具有健康的存储清单和足够的服务,尽管计划在第4000行上进行维护。截至3月31日,共有70%的非ALISO存储场(Honor Rancho,Playa del Rey和La Goleta)已满70%,而Aliso Canyon储藏场的最大允许容量为340亿立方英尺(BCF)的最高允许容量的50%。这些水平共同代表了Socalgas指定的三月月底至少15.3 BCF的三倍。已在减压下运行的第4000行传输管道将从5月1日至9月30日停止使用。这将在补救期间将北部区域的公司容量从990 MMCFD降低到约870 MMCFD。北部区域的名义容量为1,590 MMCFD,但由于第4000号线,3000和235行的安全性问题,其容量已降低。由于八月和九月的撤离,到10月,所有四个领域都略有下降。需要在7月,8月和9月提取。1尽管计划维护第4000行,但工作人员的气体余额分析(请参阅附录)表明,在6月之前可以填写非Aliso领域,而Aliso Canyon可以在7月之前填写,以假设平均水力发电能力可用。在干燥的水电场景中,假设有干旱和低于平均水平的水力发电,到6月,非ALISO场就会饱满,而Aliso Canyon的最大允许容量也不达到34 bcf的最大允许容量。到10月,所有四个存储字段都更加明显。Socalgas将需要在10月和11月加强注射;但是,在干燥的水力局情况下,它可能无法在冬季之前的最高水平填充其存储场。Socalgas于2021年4月1日发布了自己的2021年夏季技术评估,该评估对最佳和最差的供应方案进行了分析。2在其最佳供应方案下,Socalgas预计在夏季结束时没有足够的供应来填充存储空间。在最坏的情况下,Socalgas认为它将没有足够的管道能力来满足预测需求。在这种最坏的情况下,Socalgas假定额外的传输

Waymo-llc-cpuc-advice-letter-0002-Tier-2-- 1月1日-2024 ...
Waymo是一家自主驾驶技术公司,其使命是使人们和事物变得安全,可以使他们前进。在Waymo中,我们旨在通过安全,负责任地驾驶,同时为我们的车手提供舒适,一致的运输体验,以减少交通伤害和死亡。安全是Waymo任务的核心 - 这是我们开始开创性的AV研发作为Google自动驾驶汽车项目的原因。Waymo的安全出版物包括Waymo的安全方法和安全准备性确定(2020年10月),其中概述了我们确定准备安全部署准备的方法,从而使我们将安全性纳入自主驾驶技术,从概念,建筑,需求和实施,验证,验证,验证,验证,以及操作。可以在Waymo.com/safety上找到有关Waymo的安全记录和实践的更多信息,包括将Waymo骑手撞车数据与710万英里(2023年12月)的人类基准进行比较,该数据呈现了Waymo的安全性能超过700万英里的完全自动驾驶(Drimeless)的操作。
ol 316,涉及自动驾驶汽车的交通碰撞报告
2024年12月17日下午1:08 PT在加利福尼亚州旧金山运营的Waymo自动驾驶汽车(“ Waymo AV”)正在撞车,涉及O'Farrell Street的Van Ness Avenue的一辆重型卡车。Waymo AV处于自主模式,当时最右边的两条车道向北行驶,当时它部分进入了左侧相邻车道,以便为沿着同一方向行驶的骑自行车的人腾出空间。在左侧的一辆重型卡车向前行驶,Waymo AV测试驾驶员在Waymo AV的后驾驶员侧之前过渡到手动模式,与重型卡车的前乘客侧接触。在撞击时,Waymo AV的4级广告没有参与,并且测试驱动程序正在手动模式下操作Waymo AV。两辆车均受到损坏。

MTR V3:2024 Waymo Open DataSet挑战的第一名解决方案 - 运动预测
我们介绍了Gemma 3,这是吉玛(Gemma)的轻型开放模型家族的多模式,规模从1到270亿个参数不等。此版本介绍了视觉理解能力,更广泛的语言覆盖范围和更长的上下文 - 至少128K令牌。我们还更改了模型的体系结构,以减少往往会在长上下文中爆炸的KV-CACHE内存。这是通过增加本地注意层与全球注意力层的比率并保持局部注意力的范围来实现的。Gemma 3型号经过蒸馏训练,并为预训练和指令固定版本提供了超过Gemma 2的性能。,我们的新型培训后食谱可显着改善数学,聊天,指导跟踪和多语言能力,从而使Gemma3-4B-IT与Gemma2-27b-it和gemma3-27b-it和gemma3-27b-it竞争与Geminii-1.5-Pro可比。我们将所有模型都发布给社区。

加利福尼亚的电网现代化报告2020
1月11日。 DE 2024 - Waymo车辆的预期操作设计域将包括张贴的速度限制最高每小时65英里的道路。 预期的操作...1月11日。 DE 2024 - Waymo车辆的预期操作设计域将包括张贴的速度限制最高每小时65英里的道路。预期的操作...