XiaoMi-AI文件搜索系统
World File Search SystemYAW
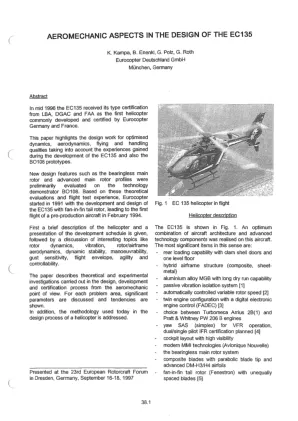
EC135 设计中的航空力学方面
图 1 显示了 EC135。该飞机实现了飞机结构和先进技术部件的最佳组合。其中最重要的项目是: 具有蛤壳门和单层地板的后装载能力 混合机身结构(复合材料、金属板) 具有长时间空运行能力的铝合金 MGB 被动隔振系统 [1] 自动控制的可变旋翼速度 [2] 具有数字电子发动机控制(FADEC)的双发动机配置 [3] 在 Turbomeca Arrius 2B(1)和 Pratt & Whitney PW 206 B 发动机之间进行选择 偏航 SAS(单缸)用于 VFR 操作,计划进行双/单飞行员 IFR 认证 [4] 具有高可见度的驾驶舱布局 现代 MMI 技术(Avionique Nouvelle) 无轴承主旋翼系统 具有抛物线叶尖和先进 DM-H3/H4 翼型的复合材料叶片 带不等距叶片的扇翼尾桨(Fenestron) [5]
2002-01-0529 紧凑型 SUV 的空气阻力...
人们越来越担心公路车辆对环境的影响,这将导致所有乘用车的空气阻力降低。这包括运动型多用途车 (SUV) 和轻型卡车,它们的阻力系数相对较高,迎风面积较大。风洞仍然是车辆空气动力学专家的首选工具,但重要的是,风洞中获得的好处应反映出车辆在道路上的改进。使用各种配置的路虎 Freelander 进行滑行测量以确定空气阻力,并将这些测量与同一车辆的风洞数据进行比较。评估了滑行数据的可重复性、接近零偏航的阻力变化的影响以及阻力偏航数据的不对称性对滑行测试结果的影响。研究了风洞测量的替代阻塞校正。针对测试的配置建立了风洞和道路上空气阻力数据之间的合理相关性。

Oculus Rift 中的头部和显示器运动产生的矢量运动和晕屏现象
摘要 摘要 通过头戴式显示器 (HMD) 观看虚拟环境时,经常会出现晕动症。本研究检查了 vection(即虚幻的自我运动)和感知头部运动与实际头部运动之间的不匹配是否会导致这种不良体验。观察者在通过 Oculus Rift HMD 观看立体光流时进行振荡偏航头部旋转。在 3 种对物理头部运动进行视觉补偿的条件下测量了 vection 和晕动症:“补偿”、“未补偿”和“反向补偿”。当 HMD 模拟较近的光圈时,发现 vection 在“补偿”条件下最强,在“反向补偿”条件下最弱。然而,在全视野曝光期间,这 3 种条件下的 vection 相似。晕动症在“反向补偿”条件下最严重,但在其他两种条件下并无不同。我们得出结论,感知头部运动与实际头部运动之间的不匹配会严重导致晕动症。矢量和晕屏之间的关系较弱且显得复杂。

4DOF 四轴飞行器:开发、建模和...
本文介绍了具有四个自由度 (4DOF) 的四轴飞行器原型的开发,该原型允许飞行器绕三个轴(偏航、俯仰和滚转)旋转以及沿 z 轴(高度)的位移。目标是获得使用商用四轴飞行器中最多组件(传感器和执行器)的工作台原型,并使用 PID、LQR 和滑模技术将其用于姿态和高度应用。从系统建模开始,展示其规格、使用的组件,最后以控制器的开发、仿真和应用结束。
4DOF 四轴飞行器:开发、建模和控制
本文介绍了四轴飞行器原型的发展,包括四自由度 (4DOF),也有可能在龙卷风中旋转(偏航、俯仰和滚转)或长时间旋转 z(高度)。目标是使用商业四轴飞行器(传感器和参与者)的主要量化组件,并使用 PID、LQR 和滑模技术来控制高度和高度的应用。系统模型部分,大多数是特定的信息、使用的组件和最终的控制者、模拟和应用程序。

控制系统的建模、仿真与设计
表 1.1:先锋 RQ-2 规格 ...................................................................................... 3 表 2.1 飞机平移和旋转运动的 12 个状态 ........................................................ 6 表 2.2 先锋 Rpv 稳定性和系数 ........................................................................ 8 表 2.3:6DOF 机身四元数块端口描述 [6] ...................................................... 16 表 3.1 平飞条件下的配平参数 ............................................................................. 21 表 3.2 反馈增益值 ............................................................................................. 26 表 5.1 由于升降舵偏转和攻角引起的升力系数 ............................................................. 33 表 5.2 由于升降舵偏转和攻角引起的阻力系数 ............................................................. 34 表 5.3 由于方向舵偏转和侧滑角引起的侧向力系数 ............................................................. 35 表 5.4 由于副翼偏转和攻角 36 表 5.5 升降舵偏转和攻角引起的力矩系数 ...... 37 表 5.6 副翼偏转和攻角引起的偏航力矩系数 38 表 5.7 攻角引起的气动系数及导数 .......................... 39

有效的端到端视觉定位,用于脱钩的BEV神经匹配
摘要 - 准确的定位在高级自主驾驶系统中起重要作用。传统地图匹配的本地化方法通过具有传感器观测值的明确匹配的地图元素来解决姿势,通常对感知噪声敏感,因此需要昂贵的超级参数调整。在本文中,我们提出了一个端到端定位神经网络,该神经网络直接估计车辆从周围图像中构成,而没有与HD图明确匹配的感知结果。为确保效率和可预性能力,提出了一个基于BEV神经匹配的姿势求解器,估计在基于可区分的采样匹配模块中估计姿势。此外,通过将每个姿势DOF影响的特征表示形式解耦来大大降低采样空间。实验结果表明,所提出的网络能够执行分解器水平的定位,平均绝对误差为0.19m,0.13m和0.39◦在纵向,横向位置和偏航角度,同时表现出68.8%的推理记忆使用率降低了68.8%。

有效的端到端视觉定位,用于脱钩的BEV神经匹配
摘要 - 准确的定位在高级自主驾驶系统中起重要作用。传统地图匹配的本地化方法通过具有传感器观测值的明确匹配的地图元素来解决姿势,通常对感知噪声敏感,因此需要昂贵的超级参数调整。在本文中,我们提出了一个端到端定位神经网络,该神经网络直接估计车辆从周围图像中构成,而没有与HD图明确匹配的感知结果。为确保效率和可预性能力,提出了一个基于BEV神经匹配的姿势求解器,估计在基于可区分的采样匹配模块中估计姿势。此外,通过将每个姿势DOF影响的特征表示形式解耦来大大降低采样空间。实验结果表明,所提出的网络能够执行分解器水平的定位,平均绝对误差为0.19m,0.13m和0.39◦在纵向,横向位置和偏航角度,同时表现出68.8%的推理记忆使用率降低了68.8%。

直接整合非轴对称高斯风 -
摘要。风电场的性能受到涡轮 - 摩擦相互作用的显着影响。通常,通过测量其Nacelle风速或使用涉及跨转子盘的一组离散点的数值方法来评估其Nacelle风速或通过评估其转子平均风速来对每个涡轮机进行量化。al-尽管文献中存在各种点分布,但我们引入了两种分析表达式,用于整合非轴对称的高斯唤醒,这解释了上游Turbine Yaw和Wind Veer产生的唤醒拉伸和剪切。分析溶液对应于将目标涡轮机建模为圆形执行盘和等效的矩形执行器盘。衍生的表达式具有多功能性,可容纳尾流源(上游涡轮机)和目标涡轮机之间的任何偏移和轮毂高度差。验证对转子平均的数值评估使用2000个下游位置的2000平均点置于尾流源的平均点,这表明在极端的veer条件下,在小/中度的逆转效应下,在小/中度的vever效应下,在小/中度的vever效应下两种分析溶液都具有出色的一致性。与使用16个平均点的矢量数值平均值相比,两种态解决方案在计算上都是有效的,而圆盘溶液的速度较慢约为15%,而矩形盘溶液的速度约为15%。此外,分析表达式被证明与多个唤醒叠加模型兼容,并且是可区分的,为推导分析梯度提供了基础,这对于基于优化的应用程序可能是有利的。
应用于太阳能无人机的太阳跟踪技术
摘要:近年来,太阳能已被用作许多不同应用的能源。目前,在无人机 (UAV) 领域,有研究将这种可再生能源技术融入其中,以提高车辆的自主性。该技术还需要特殊的构造技术和电子板,旨在减轻重量并提高无人机上所有太阳能系统的效率。众所周知,如果添加太阳跟踪技术,全天产生的太阳能量可以增加。本文证明,固定翼无人机的滚转角可用于跟踪太阳,以增加机翼上太阳能电池板产生的能量。在这种情况下,必须通过偏航角控制来补偿飞机的姿态,才能执行摄影测量任务。这将使用基于超扭曲技术的控制策略来实现,该策略确保即使在存在有界扰动的情况下也能在有限的时间内收敛。控制律的设计以及数值模拟和实际飞行结果均用于验证太阳跟踪系统的使用。