XiaoMi-AI文件搜索系统
World File Search Systemaccelerometer


加速度计,3711b122g/xxxcc安装和...
维修和维护PCB通过其对PCB出售的所有Platinum Stock产品的“终身保修Plus”保证,并通过其所有其他PCB股票,标准和特殊产品的有限保修。由于我们的传感器和相关仪器的复杂性,不建议进行现场维修和维修,如果尝试,将使工厂保修无效。除了适用的情况下,除了常规校准和更换电池外,我们的产品不需要用户维护。清洁电连接器,外壳和安装表面,其解决方案和技术不会损害建筑物的材料。在使用未密封的设备附近使用液体时要谨慎。此类设备只能用湿布擦拭 - 永不饱和或浸没。如果设备损坏或停止运行,我们的应用工程师将在这里支持您每周7天的每天24小时的故障排除工作。使用模型和序列号的致电或电子邮件,以及对问题的简要说明。校准常规校准传感器和相关仪器对于保持测量精度是必要的。我们建议在暴露于任何极端环境影响或进行任何批判性测试之前,每年进行校准。PCB Piezotronics是一家ISO-9001认证公司,其校准服务已获得A2LA为ISO/IEC 17025的认可,并通过N.I.S.T.完全可追溯SI。有关更多信息,请联系您当地的PCB压电分销商,销售代表或工厂客户服务代表。除了我们的标准校准服务外,我们还提供专门的测试,包括:升高或低温温度下的灵敏度,相位响应,延长的高频或低频响应,扩展范围,泄漏测试,静水压力测试等。

空间加速度计三联体 (SAT)
SAT 以霍尼韦尔数十年来在太空级角速率传感器技术领域的领先地位为基础,充分利用了 HG4934SRS 三轴空间速率传感器中使用的合格组件。它采用小巧、轻便、低功耗和低成本的封装,可提供一流的性能,是小型卫星的理想选择。SAT 可实现保证的 TID 和 SEE 辐射性能。
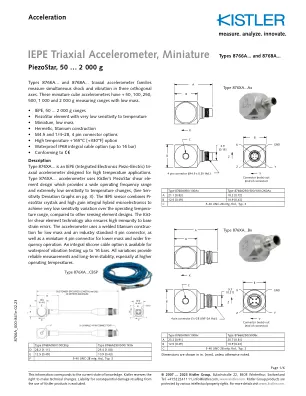
IEPE 三轴加速度计,微型
描述 876XA... 型是一种 IEPE(集成电子压电)三轴加速度计,专为高温应用而设计。876XA... 型加速度计使用 Kistler 的 PiezoStar 剪切元件设计,可提供宽工作频率范围和极低的温度变化灵敏度(请参阅第 3 页的灵敏度偏差图)。IEPE 传感器结合了 Pi- ezoStar 晶体和高增益积分混合微电子元件,与其他传感元件设计相比,可在整个工作温度范围内实现非常低的灵敏度变化。Kistler 剪切元件技术还可确保高度的抗基础应变误差能力。加速度计使用焊接钛结构以实现低质量和行业标准 4 针连接器,以及微型 4 针连接器以实现更轻的质量和更宽的频率操作。一体式硅胶电缆选项可用于高达 16 bar 的防水振动测试。所有变化均提供可靠的测量和长期稳定性,特别是在较高的工作温度下。

儿童加速度计输出校准
FREEDSON, P.、D. POBER 和 KF JANZ。儿童加速度计输出校准。《运动医学科学》,第 37 卷,第 11 期(增刊),第 S523-S530 页,2005 年。了解儿童和青少年体育活动行为的决定因素对于设计和实施增加体育活动的干预研究至关重要。使用各种类型的运动检测器评估体育活动行为的客观方法已被推荐作为该人群自我报告的替代方法,因为它们不受自我报告测量所需的儿童回忆相关的许多错误来源的影响。本文回顾了四种最常用于评估儿童体育活动和久坐行为的加速度计的校准。这些加速度计是 ActiGraph、Actical、Actiwatch 和 RT3 三轴研究跟踪器。本文回顾了描述使用直接测量的能量消耗作为标准校准这些设备的回归建模方法的研究。本文介绍了几项研究中对应于不同活动强度的能量消耗或计数范围的点估计值。对于给定的加速度计,定义 3 和 6 MET 边界的计数截点在所审查的研究中存在很大差异,尽管大多数研究在测试方案中包括步行、跑步和自由生活活动。建议使用原始加速度信号的替代数据处理作为一种可能的替代方法,其中实际加速度模式用于表征活动行为。本文介绍了定义儿童和青少年加速度计校准最佳实践的重要考虑因素。关键词:体力活动测量、运动传感器、青少年 T
型号 3711B1110G 直流响应加速度计...
本文档中包含的信息取代了本手册其他地方可能出现的所有类似信息。 完全客户满意度 – PCB Piezotronics 保证完全客户满意度。如果您出于任何原因对任何 PCB 产品不完全满意,PCB 将免费维修、更换或交换该产品。您也可以选择退还您的购买价格,以代替维修、更换或交换产品。 服务 – 由于 PCB Piezotronics 提供的传感器和相关仪器的复杂性,不建议用户进行维修或维护,如果尝试这样做,可能会导致工厂保修失效。可以进行日常维护,例如使用不会损害物理结构材料的解决方案和技术清洁电连接器、外壳和安装表面。应注意确保液体不会渗入未密封的设备。此类设备只能用湿布擦拭,切勿浸入水中或将液体倒在上面。维修 – 如果设备损坏或停止运行,应安排将设备送回 PCB Piezotronics 进行维修。不建议用户自行维修,如果尝试维修,可能会使工厂保修失效。校准 – 传感器和相关仪器的日常校准是
加速度计选择注意事项 - PCB Piezotronics
压电 (PE) 型加速度计 PE 型加速度计响应施加到其压电陶瓷或晶体传感元件上的机械应力,产生高阻抗静电荷输出。由于其高电荷灵敏度,压电陶瓷在电荷和电压模式加速度计中得到广泛应用。石英被公认为所有压电材料中最稳定的材料,也常用于通用 ICP ® 加速度计、校准传递标准以及 PE 压力和力传感器。电荷输出系统已经问世约 40 年。PE 加速度计通过低噪声电缆与高输入阻抗电荷放大器一起工作,该放大器将电荷信号转换为可用的低阻抗电压信号以供采集。电荷放大器提供信号阻抗转换、标准化和增益/范围调整。选项可能包括滤波、速度和/或位移积分以及输入时间常数的调整,这决定了低频响应。现代电荷放大器采用更有效的低噪声电路设计,并可能包含简化的 LCD 显示器和数字控制。一些“双模”型号可同时使用 PE 和 ICP ®

Medipost的电容3轴MEMS加速度计
摘要:MEMS传感器的不断开发和微型化总是为它们在与健康相关和医疗应用中使用的新可能性提供了新的可能性。MEMS设备在弹性系统中的应用允许更快的诊断,并显着促进医务人员的工作。MEMS加速度计构成此类系统的重要组成部分,尤其是那些用于监测失衡障碍患者的系统。此类传感器的正确设计对于收集有关患者运动的数据和确保整个系统的整体性能至关重要。本文介绍了专门用于跟踪患者运动的设备的三轴加速度计的设计和测量。它的主要重点是传感器的表征,比较不同的设计并评估包装和读取电路集成对传感器操作的影响。广泛的测试和测量结果确保了设计的加速度计正常工作,并允许在灵敏度/稳定性方面识别最佳设计。此外,仅当读数电路与MEMS传感器集成在相同的包装中时,提出的传感器作为应用加速度的函数的响应才能证明非常好的线性。
型号 3711E1110G 直流响应加速度计...
本文档中包含的信息取代了本手册其他地方可能出现的所有类似信息。 完全客户满意度 – PCB Piezotronics 保证完全客户满意度。如果您出于任何原因对任何 PCB 产品不完全满意,PCB 将免费维修、更换或交换该产品。您也可以选择退还您的购买价格,以代替维修、更换或交换产品。 服务 – 由于 PCB Piezotronics 提供的传感器和相关仪器的复杂性,不建议用户进行维修或维护,如果尝试这样做,可能会导致工厂保修失效。可以进行日常维护,例如使用不会损害物理结构材料的解决方案和技术清洁电连接器、外壳和安装表面。应注意确保液体不会渗入未密封的设备。此类设备只能用湿布擦拭,切勿浸入水中或将液体倒在上面。维修 – 如果设备损坏或停止运行,应安排将设备送回 PCB Piezotronics 进行维修。不建议用户自行维修,如果尝试维修,可能会使工厂保修失效。校准 – 传感器和相关仪器的日常校准是