XiaoMi-AI文件搜索系统
World File Search Systemaccelerometer

定量和统计分析杂志
ADXL335加速度计的特征用于机械振动分析ADXL335 Screenermet的特征作者:Miguelángel,Herrera-aguilar / orc ID:0000-0002-069999-1488 0000-0003-0504-6780 ID 2 nd合着者:珍妮特,米格尔。 0009-0003-4749-6605 ID 3 RD合着者:SebastiánDaniel,Carmona-Hernández / orc ID:0009-0005-7587-1163,Cvu Conahcyt,Cvu Conahcyt ID:1106038 doi:1106038 doi:10.35429 / jector:10.35429 / jqsa.27.27.27.27.27.27.27.27.27.27.27.27.27.27.27.27.27.27; Accepth于2023年12月30日摘要该项目着重于ADXL335加速度计对机械振动分析的表征,特别强调了其在教育嫉妒中可视化振动行为中的教育目的的应用。 div>在第一阶段,提出了有助于对振动实际观察的模块的创建。 div>该实现是通过与移动应用程序和Arduino-LabView平台结合使用ADXL335加速度计进行实现的。 div>在科学贡献的热量中,该项目解决了开发实用和教学方法来分析教育环境中机械振动的必要性。 div>表征,加速度计,机械振动诸如Arduino,Labview和ADXL335加速度计等技术的集成为与振动行为相关的教学概念提供了可访问且通用的平台。尽管传感器表征存在限制,但获得的经验和结果为未来的研究提供了有价值的见解,旨在提高测量精度。

Spine Cop:姿势矫正监测器和助手
摘要:背部和脊柱相关问题是大多数人一生中经常遇到或将要遇到的疾病。可以做出的一个常见且明智的观察是关于个人的姿势。我们提出了一种新方法,将加速度计、陀螺仪和磁力计传感器数据与永磁体相结合,组装成一个可穿戴设备,能够实时监测脊柱姿势。每个用户都需要对设备进行独立校准。传感器数据由概率分类算法处理,该算法将实时数据与校准结果进行比较,验证数据点是否位于计算阈值定义的置信区域内。如果加速度计和磁力计都将姿势分类为不正确,则认为姿势分类不正确。在单个成年测试对象中进行了试点试验。磁铁和磁力计的组合大大提高了姿势分类准确度(89%),而仅使用加速度计数据时获得的准确度(47%)则为准确度。该方法的验证基于图像分析。

利用机器学习和加速度测定法以不确定性对动物行为进行分类
腐烂的传感器在加速我们对动物生态学的理解方面一直是关键的,提供了具有高级基本生态学理论和知情保护行动的多种数据(Snape等,2018; Nickel等,2021; Nickel等,2021; Vonbank et al。,2023; West et al。,2024)。起源于主要用于跟踪动物位置和运动的工具,动物损坏的传感器已经演变为涵盖能够监视动物环境,行为和内部状态的广泛设备(Wilmers等,2015)。动物磨损的加速度计 - 衡量运动平面加速变化的传感器 - 已用于估计各种研究系统和问题的能量支出,并推断动物行为(请参阅Halsey等人。(2011); Fehlmann et al.(2017)).通过在开阔海洋中发现大型上层鱼类产卵行为的检测到表征难以捉摸的陆地捕食者的狩猎和能量(Clarke等,2021; Wang等,2015),加速度计在生态学上已成为一个有价值的工具,并在生态学上已经大大扩展了跨越的生态范围,以前跨越了跨越的生态范围,并具有跨越的范围,并具有跨越的范围,并具有跨越的范围。 (Studd et al., 2021).加速度计捕获动物行为的实用性在于它们捕获与特定运动或与不同行为不同的特定运动或姿势相对应的不同波形模式的能力(Brown等,2013)。用于分类动物行为的机器学习模型包括来自古典机器学习分类器的多样性,例如支持向量机(Martiskainen然而,与其他传感器方式(例如GPS或温度传感器)提供的直接测量相反,加速度计数据的相对抽象的性质可以使波形的解释具有挑战性。因此,用加速度计数据识别行为通常需要将原始加速度计数据与已知行为配对,以创建标记的数据集,这些数据集可用于学习感兴趣的不同行为的特定波形模式(Brown等,2013)。由于可以收集的大量加速度计数据以及行为特征之间的微妙区别,手动检测到看不见的加速度计数据中的不同行为可能具有挑战性。为了克服这一问题,机器学习技术越来越被利用,以学习从标记的数据集中采取不同行为的加速度计模式(Chakravarty等,2019; Garde等,2021; Otsuka et al。,2024)。
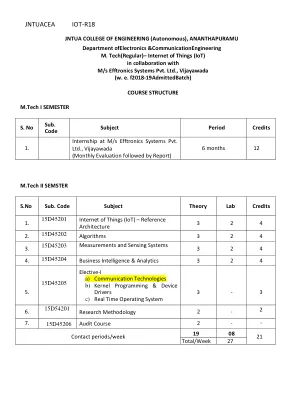
JNTUACEA IOT-R18
占用和运动探测器:超声波、微波运动、电容式占用、可见光和近红外光、远红外运动、PIR 运动、位置、位移和水平传感器:电位式、重力式、电容式、电感和磁式、光学、超声波、雷达位置、位移和水平传感器:电位式、重力式、电容式、电感和磁式、光学、超声波、雷达。速度和加速度传感器:电容式加速度计、压阻式加速度计、压电式加速度计、热加速度计、加热板加速度计、加热气体加速度计、陀螺仪、压电电缆 气体传感器:二氧化碳、一氧化碳、NOX、SOX、PM2.5、PM10、挥发性有机化合物 应用:制造业、机器人领域的案例研究

PNP3000 GPS 跟踪设备
» OBD-II 接口 » » 内置加速度计 » » 卓越的 GPS 和蜂窝质量 » 内置 GSM 和 GPS 天线 » » 开放服务计划 - 无需合约 » 30 天退款保证

欧空局科学核心技术计划带来的社会经济效益
此前,InnaLabs 已赢得 ESA CTP 合同,开发适用于太空任务的陀螺仪,目前他们已提供可用于某些太空活动的 IMU - POLARIS,适用于短期至中期太空任务,如发射器、微型发射器、着陆器和再入飞行器。然而,POLARIS 中的加速度计基于航空级设计,而不是抗辐射加速度计;因此,随着 AQUILA 引入其产品组合,他们有可能提供更强大的 IMU 产品,包括抗辐射陀螺仪和加速度计。此外,通过将 AQUILA 出售给其他生产 IMU 的公司,他们提供了一种构建完全欧洲化的 IMU 的解决方案,不受出口限制,而这迄今为止还无法实现。

使用 ARDUINO UNO 的智能轮椅 - IJSRMS
对于肢体残疾的人,我们开发了语音和手势控制轮椅。残疾人或老年人可以使用这项技术。该系统使用语音和手势。在语音系统中,我们使用前进、后退、左转、右转、停止等命令。我们识别了语音,成功识别率为 99.03% 到 98.3%,我们还使用手势控制轮椅的移动,为此我们使用加速度计传感器。加速度计直接连接到微控制器,微控制器连接到编码器 IC(HT12E),该 IC 连接到 RF 发射器模块,以无线方式传输数据。电机收到信号后将相应地运行。该系统的目的是通过语音和手势实现轮椅的方向控制。

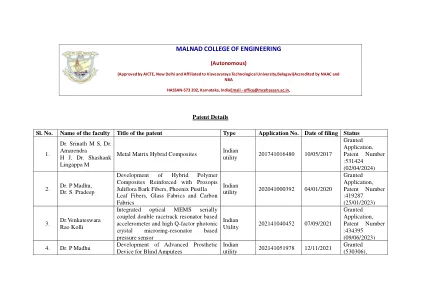
专利期刊专利局官方期刊
(57) 摘要:公开了一种用于自主导航的飞行器偏航角估计的系统和方法。该系统包括以预定义方式位于竞技场中的第一组超宽带 (UWB) 传感器,以及安装到飞行器上的第二组超宽带 (UWB) 传感器、加速度计、陀螺仪和处理器。处理器被配置为基于从第一组 UWB 传感器、加速度计和陀螺仪接收的信号来识别第二组 UWB 传感器相对于惯性参考系的位置。处理器还被配置为基于第二组超宽带传感器对应于参考系的矢量角的位置来计算偏航角。该系统始终提供准确的偏航角估计,并且在 GNSS 拒绝环境中提供准确的定位。
实现“GRACE-I”卫星任务,用于并行观测
o 例如,在具有大倾斜角的钟摆轨道上飞行(这会增加对东西重力变化的敏感性)将需要进一步研究,因为由此产生的两个航天器的相对速度可能对于 LRI 操作来说太高。o 对于低于 420 公里的高度(为了进一步增加对重力变化的敏感性),非重力力的增加幅度可能对于加速度计来说太大,可能需要更复杂的 AOCS。o 将航天器的分离从 220 公里增加到 300 或 400 公里(这将降低加速度计误差的影响)另一方面会增加两颗卫星之间的指向要求,这可能会抵消大距离的积极影响。所有这三个都需要在后续研究中进一步调查。