XiaoMi-AI文件搜索系统
World File Search Systemactual
Treet Corporation Limited
Production Capacity and Utilization FY23A FY24A Installed Capacity - Blades in Units (mln) 2,230.00 2,230.00 Actual Production - Blades in Units (mln) 1,705.00 1,516.00 Utilization (%) 76.46% 67.98% Installed Capacity - Batteries in Numbers in Thousands 1,200.00 1,200.00 Actual Production - Batteries in数千733.16 646.26利用率(%)61.11%53.85%安装能力 - 成千上万的会话中的血液透析集中2,400.00 2,400.00实际产量 - 实际产量 - 成千上万次的血液透析集中度2,473.00 2,358.00 corrigation(5,358.00 corrivient)(5,358.00 uigivie)uligation(5,255.25%)10.25.04%104%5.04%104%104%4%。箱子MT 30,000.00 30,000.00实际生产 - 瓦楞纸盒MT 20,466.00 18,028.00用途(%)68.22%60.09%的安装能力 - 单位的自行车18,000.00 18,000.00实际生产 - 实际生产 - 自行车470.00 175.00利用率(%)2.9.9.97%0.97%
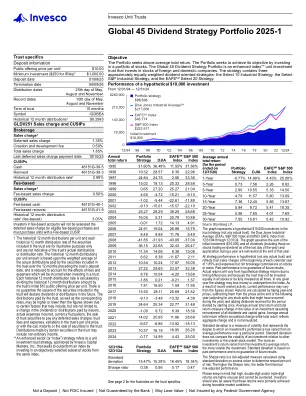
Global 45 Dividend Strategy Portfolio 2025-1
† The historical 12 month distributions per unit and each historical 12 month distribution rate of the securities included in the trust are for illustrative purposes only and are not indicative of the trust's actual distributions or distribution rate. The historical 12 month distributions per unit amount is based upon the weighted average of the actual distributions paid by the securities included in the trust over the 12 months preceding the trust's deposit date, and is reduced to account for the effects of fees and expenses which will be incurred when investing in a trust. Each historical 12 month distribution rate is calculated by dividing the historical 12 month distributions amount by the trust's initial $10 public offering price per unit. There is no guarantee the issuers of the securities included in the trust will declare dividends or distributions in the future. The distributions paid by the trust, as well as the corresponding rates, may be higher or lower than the figures shown due to certain factors that may include, but are not limited to, a change in the dividends or distributions paid by issuers, actual expenses incurred, currency fluctuations, the sale of trust securities to pay any deferred sales charges, trust fees and expenses, variations in the trust's per unit price, or with the call, maturity or the sale of securities in the trust. Distributions made by certain securities in the trust may include non-ordinary income. ** An enhanced sector (or “index”) strategy refers to a unit investment trust strategy, sponsored by Invesco Capital Markets, Inc., that seeks to outperform an index by investing in an objectively selected subset of stocks from the same index.
一个基于证据的排名,2024
2.1机构数量7 2.1.1大学(包括大学级机构)7 2.1.2大学8 2.1.2.1大学每个地区9 2.1.2.2大学密度10 2.1.2.3州学院数量最高的州10 2.1.2.4专业化,专业学院 - 学院数量11 2.1.2.1.1.2.5 2.2.1 Social Group-wise Distribution 17 2.2.2 Representation of Minority Students 17 2.2.3 Representation of Person with Disabilities (PWD) students 18 2.2.4 Level Wise Enrolment (including estimation) 18 2.2.5 Programme-wise Enrolment (Based on Actual Response) 19 2.2.6 Discipline/Subject-wise Enrolment (Based on Actual Response) 20 2.2.6.1 Discipline-wise Enrolment at Under Graduate level 20 2.2.6.2研究生级别的学科入学率21 2.2.6.3博士学位的纪律入学人数。级别22 2.2.7 STEM课程的入学率23 2.2.7.1工程和技术流23 2.2.7.2科学流24 24 2.2.8大学及其组成单位(基于实际响应)

使用机器学习预测3D打印零件的孔隙率和微观结构
Table 9: Comparison of input parameters of data points from research paper with simulation data points ............................................................................................................................................. 44 Table 10: Results of columnar/equiaxed grains for data from research paper (Newell et al., 2019) ....................................................................................................................................................... 45 Table 11: Actual vs predicted results by different ML models for data from research paper ...... 45

重型电池电动汽车
1) Based on "overnight" capital cost of grid infrastructure at current price levels – actual utility investment will be higher due to 1) price inflation of labor and equipment, and 2) Utility guaranteed rate of return 2) Distribution grids will serve on-site and on-route charging demand from local fleets – long-haul trucks / highway charging stations will be served by the transmission grid and bulk power system
第2阶段:改变方法论的免疫力
Participants are expected to understand some reasons why leaders do not want to change Participants are expected to understand the steps how leaders change their immunity Participants are expected to observe actual behavior Participants are expected to set objectives Participants are expected to set expected behavior Participants are expected to implement the methodology how to change the immunity of the leaders Sequences
公司资料
SAMDEX® • SED & SMD integrated unit • Certifi ed against relevant detection standards for explosive and metallic threats • Bulk detection, based on actual material properties measurement • Clear “OK/ALARM” inspection result • Increased checkpoint throughput by elimination of shoe divestiture and X-ray check • Increased comfort: passengers keep their shoes on • Ergonomics: simple and stress-free use • Analysis time: 2 sec.典型/鞋子
新机场调查委员会的报告
一辆“ A”公共汽车AIRBUSE AA机场管理局AAT AAT AAT ASIA AIR FEREIGHT终端公司ACC ACC围裙控制中心ACC ACC ACC ACC ACC SACS空中货物清除系统ACP机场核心计划ACS访问控制系统ADSCOM机场开发委员会AEC机场EEC机场EEC机场AEC机场紧急机场紧急机场紧急机场紧急情况 Station Rescue Control Ansett Ansett Australia O/B Ansett International Limited AOCC Airport Operations Control Centre AOD airport opening day AODB Airport Operational Database AOR airport operational readiness APA Aircraft Parking Aid APM Automated People Mover APV Apron Passenger Vehicle AR Airport Railway ARA Airport Restricted Area ATA actual time of arrival ATC Air Traffic Control ATCC Air Traffic Control Centre ATD actual time of departure Atlas Air Atlas Air, Inc. ATV自动转移车辆Avas音频和视觉咨询系统
免疫WA年奖
Exceptions to numeric need provided if actual utilization >90% of capacity for 2+ years or to overcome barriers : • Cost: existing providers fail to offer services at a reasonable cost • Quality: existing providers fail to meet clinical outcomes • Financial Access: existing providers fail to provide indigent, charity, or Medicaid care for 2+ years • Geographic: low cath use rate, high disease rate, or other demographic factors

代表titone,...
(a) "ALGORITHMIC DISCRIMINATION" MEANS ANY CONDITION IN WHICH THE USE OF AN AUTOMATED DECISION SYSTEM OR ARTIFICIAL INTELLIGENCE SYSTEM RESULTS IN AN UNLAWFUL DIFFERENTIAL TREATMENT OR IMPACT THAT DISFAVORS AN INDIVIDUAL ORA GROUP OF INDIVIDUALS ON THE BASIS OF THEIR ACTUAL OR PERCEIVED AGE, COLOR, DISABILITY, ETHNICITY, GENETIC INFORMATION, LIMITED PROFICIENCY IN THE ENGLISH LANGUAGE, NATIONAL ORIGIN, RACE, RELIGION, REPRODUCTIVE HEALTH, SEX, VETERAN STATUS, OR OTHER CLASSIFICATION根据该州或联邦法律的法律保护。