XiaoMi-AI文件搜索系统
World File Search Systemastronaut

职位描述生物医学工程师(BME)
关于我们:KBR GmbH(Wyle GmbH)成立于2000年10月,为德国科隆的欧洲宇航员中心(EAC)的欧洲航天局(ESA)太空医学团队(SMT)提供所需的人类航天医疗支持服务。Wyle GmbH专门从事生物医学工程,太空医学,医疗保健管理,心理学,营养,辐射,医学信息学和技术,健身和康复,物理疗法,医学教育维护和能力建设,项目/风险管理,项目/风险管理,医疗项目,医疗项目以及对航空航天,政府和太空医学科学/医学研究客户的咨询服务。KBR GmbH的员工为广泛的重要项目做出了贡献,包括宇航员的选择和培训,国际空间站的医疗运营以及支持欧洲航天局的SMT。
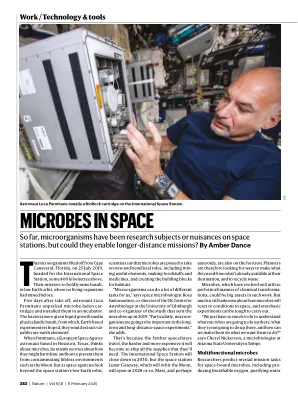
太空中的微生物
2019 年 7 月 25 日,微生物从佛罗里达州卡纳维拉尔角升空,前往距离地球约 400 公里的国际空间站。它们的任务是:大胆开采低地球轨道上的玄武岩,此前从未有生物开采过那里的玄武岩。 起飞五天后,宇航员卢卡·帕米塔诺 (Luca Parmitano) 打开装有微生物的盒子,并将其放入培养箱中。细菌被注入液体生长培养基和冰岛玄武岩,地球上的实验者希望从中提取有价值的稀土元素 1 。当帕米塔诺这位驻扎在德克萨斯州休斯顿的欧洲航天局宇航员想到微生物时,他主要担心的是它们会如何伤害他,以及如何防止它们污染月球等没有生命的环境。但随着航天机构将目光投向空间站的低地球轨道之外,

持续时间太空任务:急救医学...
这些宇航员均为白人男性,执行任务时年龄在 36 至 47 岁之间,10 其中大多数具有军事背景。11 最长任务时间为十二天半。12 尽管任务时间相对较短,但阿波罗任务期间还是出现了一些医疗问题:阿波罗 7 号“因全体机组人员出现病毒性上呼吸道感染而被称为‘十天感冒胶囊’”;13 一名阿波罗 13 号宇航员患上了尿路感染;14 每位阿波罗 10 号宇航员都遭受了两天的眼部玻璃纤维刺激;15 所有 24 名宇航员都暴露在高能辐射下。16 尽管如此,由于宇航员数量相对于一般人群较少且任务时间较短,从已离开近地轨道的宇航员那里获得的医学研究范围极其有限。17

约翰·梅斯·格伦斯菲尔德博士
约翰·M·格伦斯菲尔德是一名科学家和前宇航员,在载人太空探索、空间科学任务和国家空间政策方面具有丰富的领导经验。他曾担任美国宇航局宇航员、科学副局长和华盛顿特区美国宇航局总部首席科学家。作为副局长,他的职责包括每年 70 亿美元的地球科学、天体物理学、行星科学、太阳物理学、詹姆斯·韦伯太空望远镜和 NOAA 气象卫星计划。此前,他曾担任巴尔的摩空间望远镜科学研究所副主任,管理哈勃太空望远镜和即将推出的詹姆斯·韦伯太空望远镜的科学项目。格伦斯菲尔德的科学研究领域是行星科学和寻找地球以外的生命。他对地球和气候科学以及应对气候变化的策略有着深厚的了解。格伦斯菲尔德也是一名狂热的探险家,喜欢登山、骑自行车、航海和驾驶小型飞机。
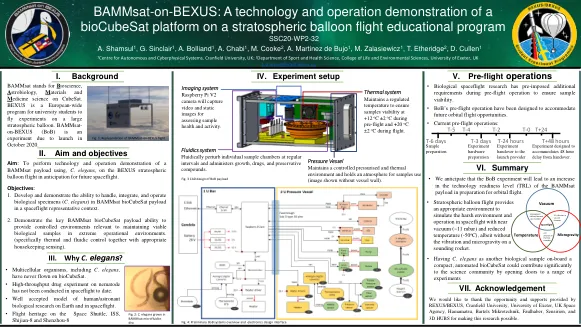
bammsat-on-bexus:一种技术和操作...
•包括秀丽隐杆线虫在内的多细胞生物从未在BioCubesat上飞行。•迄今为止在太空飞行中尚未对线虫进行高通量药物实验。•人类/宇航员在地球和太空飞行中的良好接受模型。•航天飞机,ISS,Shijian-8和Shenzhou-8

amapay_user_manual ver 2-7-2025.docx
在国际空间站(ARISS)上的业余广播启发,启发和教育年轻人在科学,技术,工程,艺术和数学(Steam)领域,通过给他们一个机会直接通过业余无线电与Orbit Crew直接交谈。通过Ariss Ham Radio连接,学生向ISS船员询问有关太空生活,职业机会或其他与太空相关的主题的问题。在建立Ariss Astronaut连接之前,学生们通过业余(HAM)无线电将大约4到6个月的学习学习有关太空探索,太空研究,太空通信和无线电科学和技术的学习。业余无线电组织以及美国,俄罗斯,加拿大,日本和欧洲的太空机构通过提供设备和运营支持,以通过业余广播电台提供设备和运营支持来赞助这一教育机会。世界各地的数百名业余无线电运营商在幕后工作,以使这些教育经历成为可能。Ariss计划有多个目标:

iac – 20 – d1.6.4设计和测试机器人头像...
摘要在2019年底,宇航员卢卡·帕尔米塔诺(Luca Parmitano)远程控制了配备了机器人操纵器的漫游者,并在ISS的月球 - 纳尔格网站上执行地质任务。一年零7个月后,在2021年7月,他将在更现实的月球 - 分析环境中控制同一条漫游者:意大利埃特纳山上的火山岩和雷果石领域。这些实验在ESA的Meteron项目框架中构成了模拟1活动。作为有效负载开发人员,我们想创建一个宇航员的接口,以直观地在行星或月球表面上操作机器人系统:我们如何才能最大程度地提高任务效率和沉浸式 /透明度的感觉?同时,我们如何最大程度地减少操作员的疲劳以及身体和精神效果?以及在人类空间的框架中,我们如何执行此操作,并具有质量和软件要求,并具有延迟,低宽带和不可靠的通信?我们展示了如何创建具有直观图形和触觉用户界面的远程动物系统。这包括力量反馈设备和自定义操纵杆,控制一个移动机器人平台。机器人平台由一个全地形底盘和两个带有扭矩传感的7-DOF机器人臂组成。一只手臂安装在漫游车的前部,用于操纵;另一个被安装在顶部,用于重新放置相机。使用该系统,宇航员完全控制了机器人以收集岩石样品。唯一的外部输入是从科学家组成的科学家,而不是语音循环和文字,关于地质样本的选择。通过Sigma.7触觉输入设备提供了操纵臂的全部稳定的6-DOF力反馈。这意味着宇航员可以(第一次从空间开始)不仅与轨道的行星表面接触,而且还可以感觉到它们所抓住的岩石的重量。系统状态反馈是在用户界面上的视觉和直觉上显示的 - 在ISS上的笔记本电脑上运行 - 以及两个摄像机的视图。在开发过程中,我们不断整合来自各种利益相关者的要求,以及宇航员和宇航员培训师的反馈,以改善用户界面。模拟测试提供了有关如何设计远程呈现系统来控制行星表面上从轨道上控制机器人的宝贵见解。我们希望这些见解对于在类似情况下的远程制定行星机器人技术以及陆地应用的未来开发非常有用。关键字:(最大6个关键字)远程操作,机器人技术,低带宽,触觉,实时,延迟

恒星探索指南 - 休斯顿太空中心
我会像宇航员一样慢慢走路! 我会用安静、内敛的声音说话。 我只触摸可以触摸的东西。 如果我迷路了或者不知道该怎么做,我会寻求帮助。 我会经常洗手,确保每个人的安全。 我会一直和我的团队或家人在一起。