XiaoMi-AI文件搜索系统
World File Search Systembima
房间里的 AI 代理:为移植选择委员会提供客观决策信息 Bima J. Hasjim MD MSc 1,2 *、Ghazal Azafar PhD 2,3 *、Frank Lee MD 4、Tayyab S. Diwan MD 4、Shilpa Raju MPH 2、Jed Adam Gross MPhil JD 5,6、Aman Sidhu MD 2、Hirohito Ichii MD PhD 1、Rahul G. Krishnan PhD 7、Muhammad Mamdani MPH PharmD 8,9、Divya Sharma PhD 10,11 +、Mamatha Bhat MD PhD 2,3,12,13 + *共同第一作者 + 共同资深作者 1 加州大学欧文分校外科系,加利福尼亚州奥兰治,美国 2 多伦多大学大学健康网络 Ajmera 移植中心移植 AI 计划, 3 加拿大安大略省多伦多大学健康网络多伦多总医院研究所 4 明尼苏达州罗彻斯特梅奥诊所医学院移植外科分部 5 加拿大多伦多大学健康网络临床和组织伦理学系 6 加拿大安大略省多伦多大学达拉拉纳公共卫生学院临床公共卫生分部 7 加拿大安大略省多伦多大学计算机科学系 8 加拿大安大略省多伦多大学健康网络多伦多总医院药学系和妇女健康计划 9 临床评估科学研究所 10 加拿大安大略省北约克大学数学与统计学系 11 加拿大安大略省多伦多大学健康网络生物统计学系 12 加拿大安大略省多伦多大学医学系胃肠病学和肝病学分部 13 加拿大安大略省多伦多矢量研究所 通讯作者:Mamatha Bhat,医学博士
房间里的 AI 代理:为移植选择委员会提供客观决策信息 Bima J. Hasjim MD MSc 1,2 *、Ghazal Azafar PhD 2,3 *、Frank Lee MD 4、Tayyab S. Diwan MD 4、Shilpa Raju MPH 2、Jed Adam Gross MPhil JD 5,6、Aman Sidhu MD 2、Hirohito Ichii MD PhD 1、Rahul G. Krishnan PhD 7、Muhammad Mamdani MPH PharmD 8,9、Divya Sharma PhD 10,11 +、Mamatha Bhat MD PhD 2,3,12,13 + *共同第一作者 + 共同资深作者 1 加州大学欧文分校外科系,加利福尼亚州奥兰治,美国 2 多伦多大学大学健康网络 Ajmera 移植中心移植 AI 计划, 3 加拿大安大略省多伦多大学健康网络多伦多总医院研究所 4 明尼苏达州罗彻斯特梅奥诊所医学院移植外科分部 5 加拿大多伦多大学健康网络临床和组织伦理学系 6 加拿大安大略省多伦多大学达拉拉纳公共卫生学院临床公共卫生分部 7 加拿大安大略省多伦多大学计算机科学系 8 加拿大安大略省多伦多大学健康网络多伦多总医院药学系和妇女健康计划 9 临床评估科学研究所 10 加拿大安大略省北约克大学数学与统计学系 11 加拿大安大略省多伦多大学健康网络生物统计学系 12 加拿大安大略省多伦多大学医学系胃肠病学和肝病学分部 13 加拿大安大略省多伦多矢量研究所 通讯作者:Mamatha Bhat,医学博士
国防部自动生物识别系统 (ABIS)
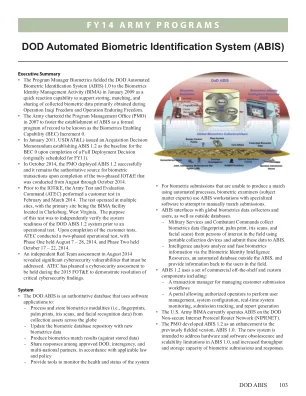
• 对于无法通过自动化流程进行匹配的生物特征提交,生物特征检查员(主题专家)使用带有专门软件的 ABIS 工作站尝试手动匹配提交。 • ABIS 与全球生物特征数据收集者和用户以及外部数据库交互。 - 军事部门和作战司令部使用便携式收集设备从现场感兴趣的人员收集生物特征数据(指纹、掌纹、虹膜扫描和面部扫描),并将这些数据提交给 ABIS。 - 情报分析员通过生物特征身份情报资源(ABIS 之外的自动化数据库)分析和融合生物特征信息,并将信息反馈给现场用户。 • ABIS 1.2 使用一组商用现货和定制组件,包括: - 用于管理客户提交工作流的交易管理器 - 允许授权操作员执行用户管理、系统配置、实时系统监控、提交跟踪和报告生成的门户 • 美国陆军 BIMA 目前在国防部非安全互联网协议路由器网络 (NIPRNET) 上运行 ABIS。 • PMO 开发了 ABIS 1.2,作为对之前部署的版本 ABIS 1.0 的增强。新系统旨在解决 ABIS 1.0 中的硬件和软件过时和可扩展性限制,并提高生物特征提交和响应的吞吐量和存储容量。
DOD 自动生物识别系统 (ABIS)
• 对于无法使用自动化流程进行匹配的生物特征提交,生物特征检查员(主题专家)使用带有专门软件的 ABIS 工作站尝试手动匹配提交。• ABIS 与全球生物特征数据收集者和用户以及外部数据库交互。- 军事部门和作战司令部使用便携式收集设备从现场感兴趣的人员收集生物特征数据(指纹、掌纹、虹膜扫描和面部扫描),并将这些数据提交给 ABIS。- 情报分析员通过生物特征身份情报资源(ABIS 之外的自动化数据库)分析和融合生物特征信息,并将信息反馈给现场用户。• ABIS 1.2 使用一组商用现货和定制组件,包括: - 用于管理客户提交工作流的交易管理器 - 允许授权操作员执行用户管理、系统配置、实时系统监控、提交跟踪和报告生成的门户 • 美国陆军 BIMA 目前在国防部非安全互联网协议路由器网络 (NIPRNET) 上运行 ABIS。• PMO 开发了 ABIS 1.2,作为对之前部署的版本 ABIS 1.0 的增强。新系统旨在解决 ABIS 1.0 中的硬件和软件过时和可扩展性限制,以及增加生物特征提交和响应的吞吐量和存储容量。
国防部自动生物识别系统 (ABIS)
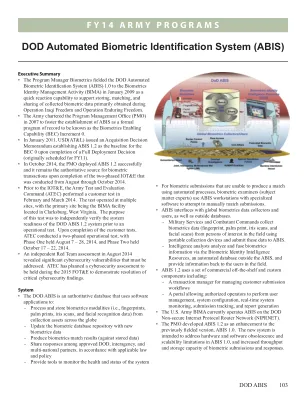
• 对于无法使用自动化流程进行匹配的生物特征提交,生物特征检查员(主题专家)使用带有专门软件的 ABIS 工作站尝试手动匹配提交。• ABIS 与全球生物特征数据收集者和用户以及外部数据库交互。- 军事部门和作战司令部使用便携式收集设备从现场感兴趣的人员收集生物特征数据(指纹、掌纹、虹膜扫描和面部扫描),并将这些数据提交给 ABIS。- 情报分析员通过生物特征身份情报资源(ABIS 之外的自动化数据库)分析和融合生物特征信息,并将信息反馈给现场用户。• ABIS 1.2 使用一组商用现货和定制组件,包括: - 用于管理客户提交工作流的交易管理器 - 允许授权操作员执行用户管理、系统配置、实时系统监控、提交跟踪和报告生成的门户 • 美国陆军 BIMA 目前在国防部非安全互联网协议路由器网络 (NIPRNET) 上运行 ABIS。• PMO 开发了 ABIS 1.2,作为对之前部署的版本 ABIS 1.0 的增强。新系统旨在解决 ABIS 1.0 中的硬件和软件过时和可扩展性限制,以及增加生物特征提交和响应的吞吐量和存储容量。

AI 和 RPA 如何帮助 IFFCO-Tokio 恢复正常
讲述了在 AI/ML 驱动的理赔、RPA 和其他远程工作功能的帮助下,公司如何成功使 80% 的业务恢复正常。编辑摘录:COVID-19 对 IFFCO-Tokio 和整个行业的业务有何影响?Covid-19 的干扰和随后的封锁影响了整个非寿险行业的业务。新财年的影响非常严重,因为汽车领域没有销售。它也对汽车保险业务产生了多米诺骨牌效应,该业务占业务的 50% 以上。在本财年开始时,汽车制造商的销售额为零,这也影响了汽车保险行业的收入。不过,我们能够通过之前在技术方面的投资来减少 Covid-19 危机的影响。这些投资,例如 AI/ML 驱动的理赔、RPA 和其他远程工作功能,支持企业抵御了这次经济衰退。此外,在 IBM、Adobe、Cisco 等供应商的支持下,我们能够在这场危机中做出最后一刻的安排。在零售方面,与健康保险相关的咨询有所增加,现在有更多人想购买健康保险。这场危机将健康保险推到了风口浪尖,我们预计未来会有更多人购买健康保险。您一直在谈论数字化及其必要性。您的数字投资如何帮助企业在 Covid-19 危机中维持下去?鉴于我们在过去两到三年的数字化计划,我们的大多数应用程序都能够在 Web 浏览器和我们的保单发布应用程序(如 Bima App)上运行。销售点 (Pos) 应用程序在当前情况下也派上了用场。它使我们的代理商和中介能够从我们的移动和 PoS 应用程序发布保单。我们能够通过这些渠道获得大约 80% 的业务。对于大额保单,我们已经通过 VPN 提供了对核心系统的访问权限。几个月前,随着公司各个垂直部门推出 BYOD,我们确保了员工的工作效率。

国际语言教育杂志第8卷,第3卷,第2024页,第438-454页ISSN:2548-8457(印刷)2548-8465(在线)doi:https://doi.org/10
国际语言教育杂志第8卷,第3卷,2024年,pp。438-454 ISSN:2548-8457(印刷)2548-8465(在线)doi:https://doi.org/10.26858/ijole.v8i3.66489 flow学习的态度尺寸 Harapan Bima, Indonesia Email: abas@students.undiksha.ac.id Desak Putu Parmiti University of Ganesha Education, Indonesia Email: dp-parmiti@undiksha.ac.id I Nyoman Jampel Ganesha University, Indonesia Email: nyoman.jampel@yahoo.go.id I Made Candiasa Indonesian University of Education, Indonesia Email: aaysusilawati@upi.edu收到:2023年1月1日审查:2024年4月13日至2024年8月1日接受:2024年9月1日发表:2024年9月30日,摘要这项研究研究了基于视频的翻转学习对非英语课程学生态度的影响,专注于享受,娱乐,激励,动机,动机,行为,行为,行为和感知和感知。该研究员工是一种描述性研究设计,通过向30名参加非英语语言课程的学生管理的问卷收集数据。tells揭示了对翻转学习的显着积极态度,享受和参与方面的分数很高,表明偏爱基于视频的学习环境的互动和动态性质。该研究证实,动机和行为意图受到翻转模型的积极影响,增强了学生的积极学习行为以及与课程材料的整体参与。此外,学生对基于视频的学习的积极看法表明,这种方法支持对语言技能的更深入的理解和保留。这项研究通过证明翻转学习模型可以显着改善学习经验和成果
Rajasthan-Energy-Transition-roadmap-2030- ...
每个州在国家发展计划中都很重要。没有国家的进步,我们无法确保印度的进步。宪法将我们束缚在联邦政府中,政府的每个秩序(工会,州和地方)都可以发挥重要作用。州政府当然更接近人民,因此有巨大的责任,以确保有效地提供商品和服务。在这项努力中,他们具有直接,间接和有能力的角色。拉贾斯坦邦致力于这一目标,并且从长期以来一直处于许多改革的最前沿。在大流行期间,我们真诚而不断的努力得到了广泛的认可。Bhilwara covid-19遏制模型在全球范围内被认为是可复制模型。我们也是印度最早的州之一,在大流行之后,我们提出了一项全面的经济复兴战略。除了采取了许多直接步骤以扩大社会和经济救济期间,在19日期间,拉贾斯坦邦还采取了几项变革性措施,以促进国家的经济。MSME促进法案,2019年;食品加工政策,2019年;旅游政策,2020年; Mukyamantri Chiranjeevi Swasthya Bima Yojana,2021年;手工业政策,2022年;拉贾斯坦邦投资促进计划,2022年;拉贾斯坦邦《卫生保健权法》,2022年; Indira Gandhi城市就业保证计划,2022年和2030年愿景是政府采取的一些道路破坏计划。我们还开始了“主题”年度预算的实践,以将我们的精力和精力融合到大多数紧迫的问题上,并确保治理确实是分散的。我们在“ Prashasan Shehron Ke Sang Abhiyan”和“ Prashasan Gaon Ke Sang Abhiyan”上进行的竞选是这种精神的例子。

Soren Madsen 通往天堂的阶梯标签 pdf - Weebly
我不知道你这个那个,在你身上他我我们为他们知道可以从不你我们到是的人但必须在这里走得很好就像现在只想独自一人如果哦注释 1) 此列表是使用公共/免费字幕(特别是 opensubtitles)创建的。顺序基于字幕中每个单词出现的次数。 2 该列表的原始来源可以在这里找到: 3) 它是根据以下知识共享许可获得许可的: 4) 更多最常用单词列表(其他语言)可以在这里找到: on have morerights not how else had did Maybe曾经见过的那一天回来了,来吧,因为谁或某件事很多可以感谢是的,作为一个孩子,他你也想好的,出来所以在哪里好嘿,有没有发生另一个晚上的时间让一年的某个时刻为什么这个地方有一个很大的模具对不起,我只是在我一个人的时候才这么说的,为什么我会这么想说生活说好吧正在等待如果两次上帝那么错误需要回家爸爸快点进来恭喜让我们听到一点一切当然对我来说一切都很好留在上面问题可以足够每个总是很小因为吃得好想得好还没有信任某人,朋友,甚至亲爱的,可以先找人谈谈,做长时间了解工作世界,嘿自我太多次,然后停止

了不起的吉莉·霍普金斯预告片 意大利语 - Weebly
2 项提名。查看更多奖项 » 编辑其他作品:Giant Eagle 商业广告 查看更多 » Facebook | Instagram | 查看更多 » 别名:Claire Foley Aidan Foley(兄弟姐妹)| 查看更多 » 第 2 页 2 项提名。查看更多奖项 » 编辑其他作品:Giant Eagle 商业广告 查看更多 » Facebook | Instagram | 查看更多 » 别名:Claire Foley Aidan Foley(兄弟姐妹)| 查看更多 » 我们和第三方(例如我们的客户、合作伙伴和服务提供商)使用 Cookie 和类似技术(“Cookie”)来提供和保护我们的服务,了解和改善其性能,并在 LinkedIn 内外投放相关广告(包括招聘广告)。有关更多信息,请参阅我们的 Cookie 政策。选择“接受 Cookie”以同意此使用或“管理首选项”以做出您的 Cookie 选择。您可以随时在设置中更改您的 Cookie 选择并撤回您的同意。aku yang tidak kau ini itu dan di anda akan apa dia saya kita untuk mereka ada tahu dengan bisa dari tak kamu kami adalah ke ya orang tapi harus pergi baik dalam sini seperti hanya ingin sekarang semua saja sudah jika oh apakah jadi satu jangan Notes 1) 此列表是使用公共/免费字幕创建的,特别是来自 opensubtitles。顺序基于字幕中每个单词出现的次数。