XiaoMi-AI文件搜索系统
World File Search Systemcanopy

申请a7:签署许可申请
标志许可证;除墙体标志、遮阳篷和天篷标志、临时标志和豁免标志外。大多数标志都符合同意议程审查的条件(委员会在一次投票中批准多项项目,无需讨论)。同意议程审查无需出席。如果将标志列入常规议程,工作人员将通知申请人必须出席。3.经规划委员会批准后,如有必要,将处理标志许可证申请。

在收获和收获中使用激光雷达地形的吸引力和缺陷......
在采伐和道路设计中使用激光雷达地形测量的诱惑和陷阱 Finn Krogstad 和 Peter Schiess 论文发表于 2004 年 6 月 13-16 日在不列颠哥伦比亚省温哥华举行的 IUFRO 3.06 山地森林作业联合会议和第 12 届国际山地伐木会议摘要机载激光测高 (Lidar) 可以生成极其详细和准确的地形图,即使在被森林冠层遮挡的地面上也是如此。详细的激光雷达地形图可以识别可能的着陆地点、难以穿越的溪流、不稳定的土壤、难以穿越的边坡和有用的长凳。这些细节可以减少现场时间,指导道路设计选择更好的方案,并提高我们对成本估算的信心。然而,激光雷达测绘偶尔也会失败,这些失败的表现方式将决定激光雷达的可靠性和对道路设计的价值。我们讨论了首次使用激光雷达对雷尼尔山南部的塔霍玛州立森林进行测绘的经验。这种详细的地形测绘被用于森林作业设计,例如着陆点和道路位置,作为基于流域的采伐和运输计划的一部分。随后对基于激光雷达的办公室设计进行了实地验证。这种 DEM 在森林工程设计中取得成功的关键在于能够(或缺乏)区分地面点覆盖充足或边缘的区域,从而导致测绘细节优秀或错误。我们讨论了各种方法,这些方法可以识别激光雷达地面点覆盖边缘的区域,从而形成测绘承包商应遵守的第一组激光雷达数据收集要求。看到树冠下的情况木材采伐和道路规划中反复出现的一个问题是,用于采伐的树木可能会遮挡必须堆放原木和修建道路的地面。规划中常用的地形图基于航空照片,其中我们现在想要采伐的林分遮挡了我们必须规划的地面。因此,得到的地形图是顶部树冠的地图,带有假定树高的偏移量。不幸的是,树冠并不完全贴合地面,在采伐和道路规划中至关重要的细微地形变化并没有反映在最终的树冠顶部。地形通常包括土壤不稳定、岩石露头和不平坦的地形,这些可能会给采伐和道路带来困难。树冠还会遮挡可以作为方便着陆和道路位置的天然土丘和长凳。因此,这些地形图只能作为设计的一般指南,操作的关键要素需要基于现场验证。机载激光地形扫描 (Lidar) 的最新发展使得即使在森林树冠下也可以进行详细的地形测绘。激光雷达的工作原理是拍摄数百万
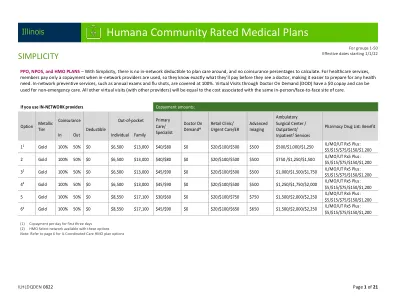
Humana 社区评级医疗计划
PPO 和 NPOS 计划 – Canopy 为会员最常用的医疗服务提供共付额,例如初级保健办公室检查、专科办公室检查、零售诊所、紧急护理和药房服务。通过 Doctor On Demand 进行的虚拟就诊共付额为 0 美元,可用于非紧急护理。所有其他虚拟就诊(与其他提供商)的费用与同一面对面/面对面护理地点的费用相同。对于所有其他网络内服务,包括与办公室就诊相关的任何实验室检查或 X 光检查,或更严重的健康问题,会员需先支付自付额,直至达到免赔额,然后支付共同保险。所有网络内预防服务,例如年度检查和流感疫苗,均 100% 承保,无需共付额。所有自付费用,包括处方药,都计入自付费用限额,有助于保护会员的年度总支出。
421 RONCESVALLES AVE, TORONTO ON M6R 2N1 加拿大 T 416.340.6745 | M 437.929.1985 | HKHUZAM@NAK-DESIGN.COM 主题:树艺师报告和树木保护
简介:我受 NAK Design Strategies 的 Haniya Khuzam 女士委托,为位于惠灵顿街 145 号的拟建住宅/商业建筑完成一份树艺师报告和树木保护计划。该报告将确定多伦多市条例所规定的所有树木,提供包含建议的保护策略和树木保护计划,其中描述了树木的位置、现有状况和任何拟议的工作。所有现场工作和数据收集均由 Cletus Gavin(RCA #613)于 2024 年 8 月 1 日完成。历史和任务:Khuzam 女士提供了一份调查和现场计划,说明了现有状况以及位于惠灵顿街 145 号的拟建建筑的初步现场计划。应客户或市政当局的要求,Canopy Consulting 可以在当前工作范围之外进一步保留,以提供现场监测服务并提供任何必要的补救措施。工作范围:
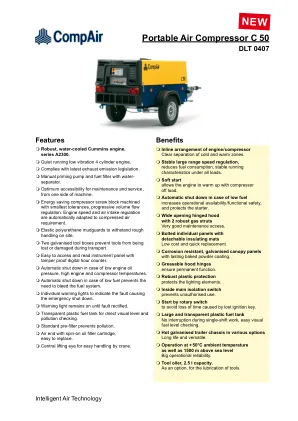
便携式空气压缩机 C 50
重量/尺寸 制动、直拖杆工作重量 (kg) 制动、可调拖杆工作重量 (kg) 制动/非制动允许总重量 (kg) 制动允许总重量 (kg) 长度 制动、可调拖杆 (mm) 制动、直拖杆 (mm) 非制动、可调拖杆 (mm) 顶篷长度 (mm) 宽度 (mm) 高度 (mm) 压缩空气出口

增强座舱下无人机的方法...
摘要:在林冠下使用无人机系统 (UAS) 为在茂密的林冠和灌木丛地区进行地面测量提供了一种潜在的宝贵替代方案。这项研究介绍了在具有挑战性的森林和地形条件下在林冠下飞行的消费级 UAS 的研究结果。部署该 UAS 是为了评估林冠下 UAS 摄影测量作为现场测量的替代方案,以获取树干直径以及森林研究地点的超高分辨率(~400,000 点/平方米)3D 模型。在一片原生、未经管理的桉树林中,在混合林下条件和陡峭地形下,从 99 根树干采集了 378 个基于胶带的直径测量值。这些测量值被用作基线,以评估基于林冠下 UAS 的摄影测量点云的直径测量精度。使用一种创新的基于胶带的方法,在不受数字地形模型影响的情况下评估了直径测量精度。介绍了一种创建这些点云的实用且详细的方法。最后,定义了一个称为圆周完整性指数 (CCI) 的指标,以解决在测量森林点云的树干直径时缺乏明确定义的点覆盖测量值的问题。建议在未来的研究中采用平均 CCI 的测量,以便能够使用不同的方法对森林点云的覆盖率进行一致的比较

MODIS 植被指数 (MOD 13) - VIP 研究实验室。
在发射时,将为全球陆地生成两种植被指数 (VI) 算法。一种是标准归一化差异植被指数 (NDVI),它被称为现有 NOAA-AVHRR 衍生 NDVI 的“连续性指数”。在发射时,将有来自 NOAA-AVHRR 系列的近 20 年的 NDVI 全球数据集(1981 - 1999 年),可以通过 MODIS 数据进行扩展,以提供用于操作监测研究的长期数据记录。另一种是“增强型”植被指数 (EVI),它对高生物量区域的灵敏度更高,并且通过分离冠层背景信号和减少大气影响来改善植被监测。这两个 VI 在全球植被研究中相互补充,并改进了冠层生物物理参数的提取。还使用了一种新的合成方案,可以减少角度、太阳目标传感器变化。网格植被指数图使用 MODIS 表面反射率(针对分子散射、臭氧吸收和气溶胶进行了校正,并使用 BRDF 模型调整至最低点)作为 VI 方程的输入。网格植被指数将包括带有统计数据的质量保证 (QA) 标记,用于指示 VI 产品和输入数据的质量。产品可以总结为:
评估原生森林是否适合木材生产
iii.北海岸私有原生森林的生长状况和生产力地图。新南威尔士州 DPI 委托 ForeSense Pty Ltd 使用 ADS 40/80 传感器获取的数字航空照片 (DAP) 图像开发此图层。2007 年至 2014 年之间的图像以马赛克瓷砖 (n. =59) 的形式从新南威尔士州财政、服务和创新部的空间数据服务中获取。新南威尔士州 DPI 为 ForeSense Pty Ltd 提供了约 1,000,000 公顷私有原生森林的基础地图图层。ForeSense Pty Ltd 随后使用 3D 数字航空摄影解释 (API) 软件绘制了基础地图区域内 2 个面积为 25 公顷或更大的同质私有原生森林区域的生长状况和生产力。测绘过程捕获了成熟树冠高度(m)数据,高度值分为 10 个类别:15、20、25、30、35、40、45、50、55 和 65+。高度低于 15 米的“非生产性”森林类型 3 被排除在外。最终产品被转换为可在 Google Earth 中查看的 kmz 文件。模型中使用的测绘树冠高度数据是一个裁剪层,范围为 395,782 公顷。